Piduri elektromagnetid kraanadele
 Piduri elektromagnetid, mis on ette nähtud mehaaniliste pidurite juhtimiseks. Nende pidurite ülesanne on omakorda peatada kraanamehhanismid antud asendis või piirata pidurdusteekonda lekke korral, kui ajami mootor on välja lülitatud.
Piduri elektromagnetid, mis on ette nähtud mehaaniliste pidurite juhtimiseks. Nende pidurite ülesanne on omakorda peatada kraanamehhanismid antud asendis või piirata pidurdusteekonda lekke korral, kui ajami mootor on välja lülitatud.
Kõige laialdasemalt kasutatakse kraanamehhanismide (vajadusel pidurdusmomendid üle 10 kN NS m) puhul – vedru ja mõnikord ka koormus. Harvemini kasutatakse ketaspidureid (pidurdusmoment kuni 1 kN x m) ja koonusekujulisi (pidurdusmoment kuni 50 N NS m).
Piduri elektromagnetite mähised lülituvad sisse samaaegselt elektrimootoriga ja vabastavad piduri. Kui elektrimootor on välja lülitatud, eemaldatakse piduri solenoidi mähised samaaegselt ja toimub pidurdamine - pidur pingutatakse vedru või koormuse toimel.
Kraanamehhanismide pidurite jaoks kasutatakse vahelduvvooluga pidurielektromagneteid: kolmefaasiline KMT-seeria (joonis 1)-pika käiguga (maksimaalne armatuuri käik 50–80 mm), ühefaasiline MO-seeria (joonis 1).2)-lühitakt (pidurivarda käik 3 kuni 4 mm), alalisvool: KMP ja VM seeria — pikk käik (armatuuri käik 40 kuni 120 mm), MP seeria (joon. 3) — lühike käik ( ankrukäik 3 kuni 4,5 mm).
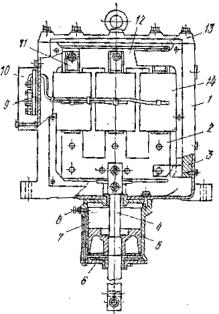
Riis. 1. KMT-seeria piduri elektromagnet: 1 — korpus, 2 — ankur, 3 — juhikud, 4 — varras, 5 — kolb, 6 ~ siibri kate, 7 — siibri silinder, 8 — surve reguleerimise kruvi, 9 — klemmiplokk, 10 — klemmiploki kaas, 11 — messingist poolihoidikud, 12 — ike, 13 — kate, 14 — mähis
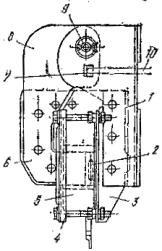
Riis. 2. MO-seeria pidurielektromagnet: 1 — fikseeritud ike, 2 — lühis, 3 — kandiline, 4 — kate, 5 — mähis, .6 — armatuur, 7 — riba, 8 — põsk, 9 — telg, 10 — tõukejõud
Translatsiooniliselt liikuva armatuuriga pidurielektromagnetite (KMT, KMP, VM ja MP) peamised parameetrid on veojõud ja armatuuri käik ning MO-seeria klapi elektromagnetitel elektromagneti moment ja armatuuri pöördenurk.
Kõigi ülaltoodud seeriate pidurisolenoidid on sõltumatud elektriseadmedliigendatud piduritega.
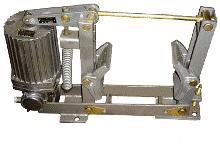
TS seeria piduriklotsid koos lühikese käiguga elektromagnetid ja TKP vedrupiduripaadid (vt joonis 3), millel on sisseehitatud alalisvoolu mähised. Nende pidurite jaoks on hoob 1 valatud kokku solenoidi korpusega ja solenoidi armatuur valatakse kangiga.
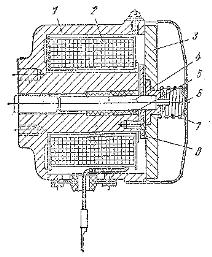
Riis. 3. MP-seeria piduri elektromagnet: 1 — korpus, 2 — mähis, 3 — armatuur, 4 — tihvt, 5 — need otoliidid ja puksid, 6 — kate, 7 — summutusvedru, 8 — poolus
Vahelduvvoolu piduri solenoidide mähised on ühendatud paralleelselt ja on mõeldud kogu liini pinge jaoks. Nende sisselülitamisel tekib märkimisväärne voolušokk: KMT seeria elektromagnetitel Azstart = (10-30) Aznumer, seeria MO — Azstart = (5-6) AzNo.
Kaitseseadmete (nt kaitsmed) valimisel tuleb arvestada sisselülitusvooluga. Käivitusvool määratakse valemitega
Azstart = Cp / √3U
kolmefaasiliste elektromagnetite jaoks
Istart = Sp / U
kus CNS — täisvõimsus käivitamise hetkel, VA, võrgupinge, V.
Alalisvoolu piduri solenoidmähised võivad olla jada- ja paralleelühendused (ergutus).
 Jadaühendusmähise elektromagnetid on kiire toimega tänu madalale induktiivsusele ja töökindlad, kuna need tagavad pidurdamise, kivide mehhanismi elektrimootori armatuuriahelas. Nende puuduseks on valepidurduse võimalus koos järgneva blokeerimisega väga väikese koormuse korral, näiteks tühikäigul. Seetõttu on soovitav kasutada neid kraanamehhanismide puhul, mille koormus ja seega ka armatuuri voolu suurus on suhteliselt väikesed, näiteks kraana liikumismehhanismide puhul.
Jadaühendusmähise elektromagnetid on kiire toimega tänu madalale induktiivsusele ja töökindlad, kuna need tagavad pidurdamise, kivide mehhanismi elektrimootori armatuuriahelas. Nende puuduseks on valepidurduse võimalus koos järgneva blokeerimisega väga väikese koormuse korral, näiteks tühikäigul. Seetõttu on soovitav kasutada neid kraanamehhanismide puhul, mille koormus ja seega ka armatuuri voolu suurus on suhteliselt väikesed, näiteks kraana liikumismehhanismide puhul.
Tõstemehhanismide vooluväärtused on umbes 40% elektrimootori nimivoolust ja liikuvate mehhanismide puhul - umbes 60%. Seetõttu on mähise pidurite veojõu või pöördemomendi suurus järjekindlalt näidatud. mähise voolu kahe väärtuse kataloogid: 40 ja 60% nimiväärtusest (vastavalt tõste- ja liikumismehhanismide jaoks).
Kui elektrimootori käivitamisel on piduri elektromagneti mähist läbiva voolu minimaalne väärtus väiksem kui 40 või 60% nimiväärtusest, siis on vaja pidurdusmomenti vähendada väärtustele. näidatud praeguse väärtuse jaoks 40 või 60% kui nimiväärtus (vähendades piduri vedru jõudu või piduri massi).
 Paralleelühendusega mähistega alalisvoolupiduri elektromagnetitel ei ole ülaltoodud puudusi. Kuid mähiste olulise induktiivsuse tõttu on need elektromagnetid inertsiaalsed. Lisaks on need vähem töökindlad, kuna elektrimootori armatuuriahela purunemisel jätkavad nende elektromagnetite mähised voolu ümber ja pidur jääb ilma pidurita.
Paralleelühendusega mähistega alalisvoolupiduri elektromagnetitel ei ole ülaltoodud puudusi. Kuid mähiste olulise induktiivsuse tõttu on need elektromagnetid inertsiaalsed. Lisaks on need vähem töökindlad, kuna elektrimootori armatuuriahela purunemisel jätkavad nende elektromagnetite mähised voolu ümber ja pidur jääb ilma pidurita.
Esimese puuduse saab kõrvaldada sundimisega, mille jaoks on mähisega järjestikku ühendatud majanduslik takistus, mis elektromagnetilise armatuuri tagasitõmbamise ajal manööverdab voolurelee avanevate kontaktidega ja siseneb elektriahelasse pärast elektromagneti armatuuri. eemaldatakse, vähendades vastavalt voolutugevust mähises ja selle kuumutamist.
Teine puudus kõrvaldatakse, ühendades voolurelee mähise järjestikku elektrimootori armatuuriga ja sulgedes see järjestikku elektromagneti mähisahelaga. Sundimise kasutamisel ei tohiks sundimise aeg olla pikem kui 0,3–0,6 s.
Elektromagnetite alalisvooluga varustamiseks vahelduvvooluvõrgust kasutatakse standardseid poollaine alaldeid dioodidega kuni 3 A ja kondensaatorite rühma mahuga 2 kuni 14 μF, mis annab väljundparameetrid, mis vastavad elektromagnetite toitemähiste tingimused.
Vahelduvvooluga pidurduselektromagneteid kasutatakse laialdaselt kraanade paigaldamisel, kuid nende tööpraktika on näidanud, et neil on mitmeid puudusi: suhteliselt madal kulumiskindlus, mähise märkimisväärsed lülitusvoolud, mis on 7–30 korda suuremad nende nimivooludest (täielikult sissetõmmatud armatuuridega). ), tugevad põrutused pidurdamisel ja vabastamisel pidurdusprotsessi sujuvuse reguleerimise puudumise tõttu, mähiste kahjustused ülekuumenemise tõttu ankru mittetäieliku tagasitõmbamisega.
 Alalis- ja vahelduvvoolupidurite elektromagnetite ühine puudus on veojõuomaduste ebatäiuslikkus: armatuuri käigu alguses arendatakse väikseimat veojõudu ja lõpus - suurim.
Alalis- ja vahelduvvoolupidurite elektromagnetite ühine puudus on veojõuomaduste ebatäiuslikkus: armatuuri käigu alguses arendatakse väikseimat veojõudu ja lõpus - suurim.
Kõigi nende puudustega on alalisvoolupiduri elektromagnetid töökindlamad kui vahelduvvoolu elektromagnetid. Seetõttu proovitakse vahelduvvooluseadmetega kraanamehhanismide pidurite juhtimiseks sageli pooljuhtalaldi toiteallikaga alalisvoolupiduri elektromagneteid.
Arvestades, et pidurielektromagnetitel on mitmeid ülalmainitud olulisi puudusi, kasutatakse neid praegu laialdaselt kraanapidurite juhtimiseks. pika käiguga elektrohüdraulilised tõukurid.