Automaatjuhtimissüsteemide klassifikatsioon

Automaatjuhtimisseadme ja juhtimisobjekti komplekti, mis on ühendatud ja üksteisega vastavalt juhtimisalgoritmile, nimetatakse automaatjuhtimissüsteemiks (ACS).
Automaatjuhtimissüsteeme saab klassifitseerida juhtimismeetodi ja funktsionaalsete omaduste järgi. Juhtimismeetodi järgi jagunevad kõik süsteemid kahte suurde klassi: tavalised (mitte-isereguleeruvad) ja isereguleeruvad (adaptiivsed).
Lihtkategooriasse kuuluvad tavalised süsteemid juhtimise käigus oma struktuuri ei muuda. Need on enim arenenud ja laialdaselt kasutatavad valukodades ja termotöökodades. Tavalised automaatjuhtimissüsteemid jagunevad kolme alamklassi: avatud, suletud ja kombineeritud juhtimissüsteemid.
Avatud ahelaga automaatjuhtimissüsteemid jagunevad omakorda automaatseteks jäikadeks juhtimissüsteemideks (SZHU) ja häirete juhtimissüsteemideks.
Esimestes süsteemides toimib regulaator juhtobjektile sõltumata saadud tulemusest ehk juhitava muutuja väärtusest ja välisest häiringust. Häirete juhtimissüsteemid töötavad põhimõttel, et juhtimistoiming genereeritakse sõltuvalt juhtimisobjekti mõjutavatest välistest häiretest.
Vaatleme näiteks valukoja või soojustöökoja küttesüsteemi. Sel juhul sõltub sooja vee tarbimine kaupluse küttetorus välistest ilmastikuoludest. Mida külmem on väljas, seda rohkem sooja vett antakse radiaatoritesse ja vastupidi.
Paindepõhimõttel töötavaid suletud automaatjuhtimissüsteeme nimetatakse ka automaatjuhtimissüsteemideks (ACS). Nende eristavaks tunnuseks on signaali läbimise suletud tsükli olemasolu, st tagasivoolukanali olemasolu, mille kaudu edastatakse teave kontrollitava muutuja oleku kohta võrdluselemendi sisendisse.
Automaatjuhtimissüsteemid on mõeldud kolme probleemi lahendamiseks: juhitava väärtuse stabiliseerimine (ATS-i stabiliseerimine), juhitava väärtuse muutmine vastavalt teadaolevatele (programmeeritud ATS) või tundmatutele (ATS-i jälgimine) programmidele.
ATS-i stabiliseerimisel on juhitava muutuja seadeväärtus konstantne. Sellise süsteemi näide on termokahju tööruumis olev temperatuuri reguleerimise süsteem. Tarkvaralises ATS-is muutub juhitava muutuja väärtus ajas vastavalt eelnevalt kavandatud (tuntud) programmile.
Servosüsteemides muutub juhitava muutuja seatud väärtus ajas vastavalt varem tundmatule programmile.Jälgimis- ja tarkvara ATS-id erinevad stabilisaatoritest võrdlussignaali töötlemise põhimõtte poolest.
Kõige tüüpilisem servojuhtimise näide on etteantud kütuse ja õhu tarbimise suhte automaatne säilitamine põlemisprotsessi reguleerimisel kütuse sulatamiseks ja soojendamiseks mõeldud ahjudes.
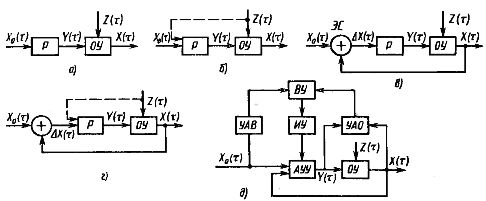
Automaatsed juhtimissüsteemid: a — avatud, b — nihkega avatud, c — suletud, d — kombineeritud, d — isereguleeruv, P — kontroller, OU — juhtimisobjekt, ES — võrdluselement, UAV — seade juhtimistoimingu analüüsimiseks : VU — arvutusseade, IU on täitevseade, AUU on automaatjuhtimisseade, AUO on juhtimisobjekti analüüsiseade.
Kombineeritud süsteemid ühendavad kõrvalekallete ja häirete kontrollisüsteemide eelised, mis suurendab juhtimise täpsust. Arvestamata häirete mõju kombineeritud süsteemides kompenseeritakse või nõrgeneb kallutatuse juhtimisega.
Isereguleeruvad (adaptiivsed) süsteemid võib jagada kolme alamklassi: äärmuslikud süsteemid, isehäälestuvad süsteemid ja isehäälestuvad süsteemid.
Äärmusliku reguleerimise süsteeme nimetatakse stabiliseerivateks, jälgimis- või programmeeritud juhtimissüsteemideks, milles seadistus-, programmeerimis- või taasesitusseadus muutub automaatselt sõltuvalt välistingimuste või süsteemi sisemise oleku muutumisest, et luua kõige soodsam (optimaalne) töörežiim. kontrollobjekt.
Sellistes süsteemides paigaldatakse püsiva seadistuse või programmi asemel automaatne otsinguseade, mis analüüsib objekti iga omadust (efektiivsus, tootlikkus, ökonoomsus jne) ja annab sõltuvalt saadud tulemusest vajaliku väärtuse juhitav muutuja juhtseadmele, nii et sellel karakteristikul on silmapaistev väärtus koos erinevate häirivate mõjude pideva muutumisega, mis mõjutavad süsteemi töötingimusi.
Isehäälestuvate parameetritega süsteemides toimub juhitava objekti välistingimuste või omaduste muutumisel automaatne (mitte etteantud programmi järgi) juhtseadme muutuvate parameetrite muutus, et tagada süsteemi stabiilne töö ja hooldus. kontrollitav väärtus antud või optimaalsel tasemel.
Isereguleeruva struktuuriga süsteemides, kui juhtimisobjekti välistingimused ja omadused muutuvad, lülitatakse ühendusskeemis olevad elemendid ümber või sisestatakse sellesse uusi elemente. Nende struktuurimuudatuste (valiku) eesmärk on saavutada juhtimisprobleemile parem lahendus.
Struktuuri valik toimub automaatse otsinguga, kasutades arvutuslikke ja loogilisi operatsioone. Sellised süsteemid ei pea mitte ainult kohanema kõikide muutustega objekti välistingimustes ja omadustes, vaid ka normaalselt toimima isegi üksikute elementide talitlushäirete või kahjustuste korral, luues uusi ahelaid katkiste asendamiseks. Isereguleeruvaid süsteeme saab panna täiustama, "kogemusi omandama", proovides kiiresti mitut võimalust, valides ja "meelde jättes" parima.
Funktsionaalne klassifikatsioon on kõik automaatjuhtimissüsteemid jagatud nelja klassi:
-
mehhanismide töö koordineerimise süsteemid,
-
süsteemid tehnoloogiliste protsesside parameetrite reguleerimiseks,
-
automaatsed juhtimissüsteemid,
-
automaatsed kaitse- ja blokeerimissüsteemid.

Süsteemid, mis on loodud tehase üksikute mehhanismide või tehase kui terviku automaatsete jäikade juhtimissüsteemide (SZHU) koordineerimiseks.
Automaatjuhtimissüsteemide (ACS) tehnoloogilised protsessid tagavad juhitava väärtuse hoidmise antud tasemel või selle muutmise vastavalt etteantud programmile.
Automaatjuhtimissüsteemid (ACS) sisaldavad vahendeid ja meetodeid tehnoloogilise protsessi parameetrite (temperatuur, rõhk, õhu tolmu- või gaasisisaldus jne) hetkeväärtuste kohta teabe saamiseks ilma inimese otsese osaluseta.
Automaatsed kaitsesüsteemid (SAZ) ja blokeerimissüsteemid (SAB) hoiavad ära avariiolukordade tekkimise, kui seadmed töötavad stabiilses olekus.