Metallilõikepinkide elektriseadmed

Kaasaegses tehnikas keeruka kujuga toote valmistamise erinevate meetodite hulgas on metalli lõikamine esikohal. Metallilõikemasinad koos sepistamis- ja valumasinatega on seda tüüpi seadmed, mis on kõigi kaasaegsete masinate, tööriistade, instrumentide ja muude tööstus-, põllumajandus- ja transporditoodete tootmise aluseks.
Mehaanilised masinad on masinad masinate enda valmistamiseks. Masinaehituse tehniline kultuur ja edusammud sõltuvad peamiselt masinaehitusest. Metallilõikepingid eristuvad eesmärgi, seadme, mõõtmete, teostusvormide ja täpsuse poolest väga mitmekesise valiku poolest.
Metallilõikepinkide elektriseadmete hulka kuuluvad elektrimootorid (asünkroonsed oravpuuriga mootorid, alalisvoolumootorid), elektromagnetid, elektromagnetsidurid, sõidu- ja piirlülitid, erinevad andurid (näiteks õlirõhu juhtimine hüdrosüsteemis), juhtnupud, lülitid , signaallambid , magnetkäivitajad, releed, juhtahela pinget vähendavad trafod, häireahela ja lokaalne valgustus, kaitseseadmed (kaitselülitid, kaitsmed ja termoreleed).
Kaasaegsete metallilõikuspinkide elektriseadmete ja automaatika hulka kuuluvad erinevad programmeeritavad kontrollerid, sagedusmuundurid, elektrimootorite pehmekäivitajad, kontaktivabad starterid, kontaktivabad piirlülitid ning muud elektroonilised ja programmeeritavad juhtseadmed.
Metallilõikepinkide elektriseadmed asuvad masinal endal, juhtpaneelil ja juhtkapis, mis tavaliselt asub masina kõrval.

Selles artiklis räägitakse, millised on erinevate enamlevinud metallilõikuspinkide elektriseadmete omadused ja erinevused: treimine, puurimine, freesimine, lihvimine ja hööveldamine.
Metalli lõikamismasinate peamised tüübid
Metallilõikepinkide mehaaniline töötlemine on suunatud tooriku sellisele muutmisele, eemaldades sellelt laastud, mille järel toorik võtab vajalikule lähedase kuju (töötlemine ja eeltöötlus) või langeb sellega kokku teatud täpsusega geomeetrilise kujuga. , mõõtmed (viimistlus) ja pinnaviimistlus (peenhäälestus).Olenevalt erinevatest teguritest viiakse detaili kuju vajalik muutmine läbi erinevat tüüpi töötlust kasutades ja erinevatel masinatel.
Praegu toodetakse suurel hulgal erineva otstarbe, tehnoloogiliste võimaluste ja suurustega metallilõikepinke.
Vastavalt automatiseerimisastmele eristan:
-
mehhaniseeritud;
-
automatiseeritud masinad (automaatsed ja poolautomaatsed masinad).
Mehhaniseeritud masinal on üks automatiseeritud toiming, näiteks töödeldava detaili kinnitamine või tööriista etteandmine.
Töötlemist teostav masin teeb kõik tehnoloogilise töötsükli töö- ja abiliigutused ning kordab neid ilma töötaja osaluseta, kes ainult jälgib masina tööd, kontrollib töötlemise kvaliteeti ja vajadusel reguleerib masinat, st reguleerib seda, et taastada tööriista ja tooriku suhtelise asendi reguleerimisel saavutatud täpsus, tooriku kvaliteet.
Tsükli all mõistetakse ajavahemikku perioodiliselt korduva tehnoloogilise toimingu algusest kuni lõpuni, sõltumata samaaegselt toodetud osade arvust.
Poolautomaatne seade - masin, mis töötab automaatses tsüklis, mille kordamine nõuab töötaja sekkumist. Näiteks peab töötaja eemaldama osa ja seadistama uue osa, seejärel lülitama masina järgmises tsüklis automaatseks tööks sisse.
Masina põhi(töö)liigutused jagunevad põhi(lõike)liikumiseks ja ettenihkeks... Põhiliikumine ja ettenihke liikumine võivad olla pöörlevad ja sirgjoonelised (translatsioonilised), neid teostavad nii toorik kui tööriist.
Abiliigutused hõlmavad liigutusi seadistamiseks, pingutamiseks, lõdvendamiseks, määrimiseks, laastude eemaldamiseks, tööriistade sidumiseks jne.
Toodete töötlemine tööpinkidel annab toorikule vajaliku pinnakuju ja mõõtmed, nihutades tööriista lõikeserva tooriku suhtes või toorikut tööriista lõikeserva suhtes. Vajalik suhteline liikumine luuakse tööriista ja tooriku liigutuste kombinatsiooniga.
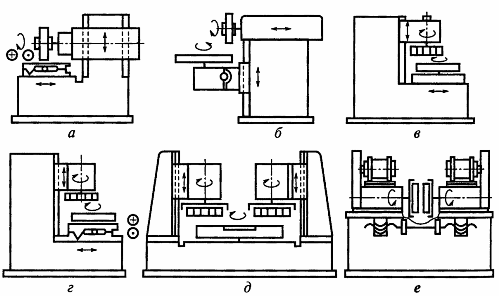
Joonisel fig. 1. on kujutatud tüüpiliste metallilõikepinkide töötlemise tüüpide skeeme, mis hõlmavad: treimist (joonis 1, a), hööveldamist (joonis 1, b), freesimist (joonis 1, c), puurimist (oriz. 1, d) ja lihvimine (joon. 1, e).
Treipinkide, karussellide, näo- ja muude masinate sisselülitamisel on põhiliigutus 1 pöörlev, mida teostab toorik 3, ja etteanaliigutus 2 on translatiivne, teostatakse tööriistaga 4 (frees).
Höövelmasinatel hööveldamisel on põhiliikumine 1 ja ettenihke liikumine 2 translatsioonilised. Pikihööveldamisel teostab põhiliikumise toorik 3 ja etteanaliikumist lõikur 4 ning põikihööveldamisel teostab põhiliikumise lõikur 4 ja etteande toorik 3.
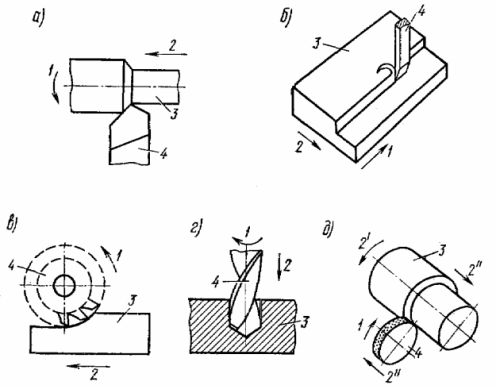
Riis. 1. Tüüpilised tööpinkide töötlemise toodete tüübid
Freesimisel on põhiliikumine 1 pöörlev, seda teostab tööriist - lõikur 4 ja etteanaliigutus 2 on translatiivne, seda teostab toorik 3.
Puurmasinate puurimisel on põhiliikumine 1 pöörlev ja ettenihke liikumine 2 translatsiooniline, mõlemad liikumised teostab tööriist - puur 4. Toorik 3 on paigal.
Lihvimismasinate lihvimisel on põhiliigutus 1 pöörlev, seda teostab tööriist - lihvketas 4 ja kahte tüüpi etteande liikumine on pöörlev 2 ', seda teostavad toorik 3 ja progressiivne 2, see on teostatakse lihvimise 4 või detaili 3 teel.
Kaasaegsetel metallilõikuspinkidel on individuaalsed (eraldi liikumisallikast pärinevad) ajamid. Liikumisallikaks metallilõikuspinkides on tavaliselt elektrimootor. Elektrimootor võib asuda masina kõrval, selle sees, masinal, selle saab sisse ehitada peatoele jne.
Metalli lõikepingi töötlemisprotsessis on vajalik säilitada seatud lõikekiirus ja valitud etteanne. Valitud lõikerežiimist kõrvalekaldumine põhjustab töötlemise kvaliteedi halvenemist või tootlikkuse langust. Seetõttu peab masina elektriajam hoidma ligikaudu konstantset kiirust koormuse muutustega, mis on põhjustatud varu kõikumisest (v.a teatud tüüpi juhtimine). Seda nõuet täidavad üsna jäikade mehaaniliste omadustega elektrimootorid.
Iga metallilõikepingi jaoks tagavad elektrimootor ja masina kinemaatiline kett koos vajaliku lõikekiiruse. Enamikus spetsiaalsetes masinates on spindli sagedus (kiirus) muutumatu.
Käigukasti ajam on praegu kõige levinum metallilõikepinkide peaajami tüüp, mille eelisteks on kompaktsus, kasutusmugavus ja töökindlus.
Käigukasti ajamite miinusteks on suutmatus sujuvalt kiirust reguleerida, aga ka suhteliselt madal efektiivsus suurtel pööretel laia juhtimisvahemiku korral.
Põhiliikumise ja etteande liikumise kiiruste astmeliseks reguleerimiseks kasutatakse masinates järgmisi meetodeid:
1. Elektriline reguleerimine toimub masina vastavat vooluahelat juhtiva elektrimootori kiiruse muutmisega.
2. Hüdraulilist reguleerimist kasutatakse peamiselt sirgjooneliste liikumiste kiiruse reguleerimiseks (hööveldamisel, lõikamisel, venitamisel), märksa harvem — pöörlevaid liigutusi.
3. Reguleerimine mehaaniliste variaatorite abil. Enamik tööpinkides kasutatavatest mehaanilistest variaatoritest on hõõrdevariaatorid.
CVT on mehhanism ajami ja ajami vahelise ülekandearvu sujuvaks ja sujuvaks reguleerimiseks.
Vaata ka: CNC-tööpinkide elektriajamid
Treipinkide elektriseadmed
Treipingi üldvaade on näidatud joonisel fig. 2. Voodil 1 on peaplaat 2 kindlalt fikseeritud, mis on ette nähtud toote pööramiseks. Voodi juhikutel on tugi 3 ja saba 4. Tugi tagab lõikuri liikumise piki toote telge. Tagaküljel on fikseeritud keskus pika toote või tööriista hoidmiseks puuride, kraanide, lahtivoltide kujul.
Treilõikurid on kõige levinum tööriist ja neid kasutatakse tasapindade, silindriliste ja vormitud pindade, keermete jms töötlemiseks.

Riis. 2. Treipingi üldvaade
Peamised treimistööde liigid on näidatud joonisel. 3.
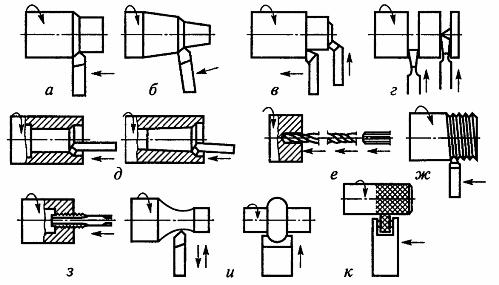
Riis. 3.Peamised treimise liigid (nooled näitavad tööriista liikumissuundi ja tooriku pöörlemist): a — silindriliste välispindade töötlemine; b — väliste kooniliste pindade töötlemine; c — otste ja lävede töötlemine; d — soonte ja soonte treimine, tooriku tüki lõikamine; d — sisemiste silindriliste ja kooniliste pindade töötlemine; e — aukude puurimine, süvistamine ja laiendamine; g — väliskeerme lõikamine; h — sisekeerme lõikamine; ja — vormitud pindade töötlemine; k — lainevaltsimine.
Treipinkide iseloomulikud tunnused on toote pöörlemine, mis on põhiliikumine, ja lõikuri 2 translatsiooniline liikumine, mis on etteande liikumine. Etteanne võib olla pikisuunaline, kui lõikur liigub piki toote telge (pikisuunaline pöörlemine), ja põiki, kui lõikur liigub piki otsapinda risti toote teljega (ristpööramine).
Spindli kiiruse reguleerimise mehaanilise meetodi puuduseks, mis viiakse läbi käigukasti käikude ümberlülitamisega, on suutmatus tagada majanduslikult soodsat lõikekiirust tooriku kõigi läbimõõtude jaoks, samas kui masin ei suuda üldse pakkuda täielikku jõudlust. kiirused.
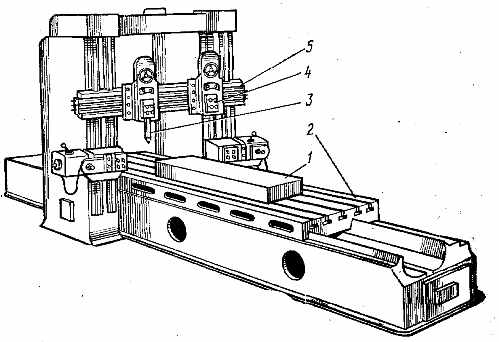
Joonisel 4 on näidatud treipingi struktuur.
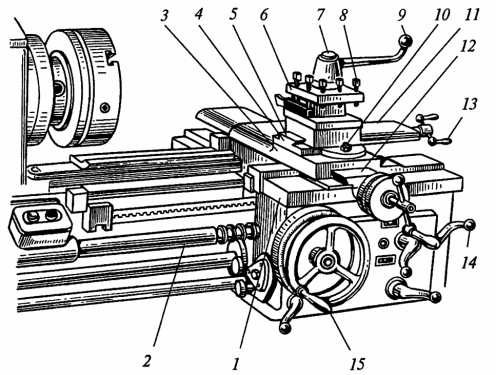
Riis. 4. Treipingi kanduri seade: 1 — alumine liug (pikitugi); 2 — juhtkruvi; 3 — toe põiki libisemine; 4 — pöörlev plaat; 5 — juhendid; 6 — tööriistahoidik; 7 — tööriistahoidiku pöörlev pea: 8 — kruvi lõikurite kinnitamiseks; 9 — käepide tööriistahoidiku pööramiseks; 10 - pähkel; 11 — ülemine liugur (pikitugi); 12 — juhendid; 13 ja 14 — käepidemed; 15 — käepide toe pikisuunaliseks liikumiseks.
Erinevateks töödeks mõeldud kruvitreipink. Nendel saate:
-
väliste silindriliste, kooniliste ja vormitud pindade lihvimine;
-
silindrilised ja koonilised augud;
-
käepideme otsapinnad;
-
lõigatud välis- ja sisekeermed;
-
puurimine, süvistamine ja hõõritsemine; lõikamine, korrastamine jms toimingud.
Tornitreipingid, mida kasutatakse partiide tootmisel keerukate konfiguratsiooniosade töötlemiseks varrastest või kangidest.
Vertikaalseid treipinke kasutatakse suure läbimõõduga, kuid suhteliselt lühikese pikkusega raskete detailide töötlemiseks. Neid saab kasutada silindriliste ja kooniliste pindade lihvimiseks ja puurimiseks, otste lõikamiseks, rõngakujuliste soonte lõikamiseks, puurimiseks, süvistamiseks, laiamaks muutmiseks jne.
Treipinkide ja puurimismasinate põhiajamid mitmesugusteks rakendusteks, nii väikesteks kui ka keskmisteks, peamiseks ajamitüübiks on induktsioonpuuriga mootor.
Asünkroonmootor on konstruktsioonilt hästi ühendatud tööpingi käigukastiga, töökindel ja ei vaja erilist hooldust.
Suure koormusega ja vertikaalsete treipinkide jaoks on tavaliselt põhiajami elektromehaaniline astmevaba kiiruse reguleerimine alalisvoolumootori abil.
Keerulise töötsükliga masinate automatiseerimisel kasutatakse astmeteta elektrilist kiiruse reguleerimist (kahetsoonilist), mis teeb nende hõlpsaks ümberseadistamise mis tahes lõikekiirusele (näiteks mõned treipingi automaattreipingid).
Ajamiseade Väikesi ja keskmise suurusega treipinke käitab kõige sagedamini peamootor, mis annab võimaluse niite lõigata. Etteandekiiruse reguleerimiseks kasutatakse mitmeastmelisi söödakaste.Käiguvahetus toimub käsitsi või elektromagnetiliste hõõrdsidurite abil (kaugjuhtimisega).
Mõned kaasaegsed trei- ja puurimispingid kasutavad sööturi jaoks eraldi alalisvooluajamit. Kaasaegsetes metallilõikuspinkides — muutuva sagedusega asünkroonajam.
Abiseadmeid kasutatakse: jahutusvedeliku pump, pidurisadula kiire liikumine, saba liikumine, saba kinnitus, suletusliigutus, käigukasti käigu liikumine, määrdepump, mootori juhtimise reostaadi liikumine, osade kinnitus, stabiilse liikumise tugi, liikuvate seadmete spindlite pöörlemine (freesimine, lihvimine jne). Enamik neist ajamitest on saadaval ainult raskemetalli lõikamismasinatel.
Elektromehaanilised lisaseadmed: elektromagnetsidurid liuguri etteande juhtimiseks, elektromagnetsidurid spindli pöörete ümberlülitamiseks.
Automatiseerimiselemendid: mootori seiskamine masina katkestuste ajal, lõikuri automaatne tagasitõmbamine töötlemise lõpus, programmeeritud digitaalne juhtimine ja tsükli juhtimine, elektriline kopeerimine.
Juhtimine ja signalisatsioon: tahhomeetrid, ampermeetrid ja vattmeetrid ajami mootori peaahelas, tööriistad lõikekiiruse määramiseks, laagrite temperatuuri reguleerimine, määrimise kontroll.
Viimasel ajal on treipinkide tarkvaraline juhtimine väga kiiresti arenenud. Lisaks suurele hulgale arvutiga juhitavatele treipinkidele toodetakse ka mitme toiminguga masinaid paljude detailide universaalseks mitme tööriistaga töötlemiseks.
Mitmeotstarbelised masinad on programmeeritud ja varustatud automatiseeritud tööriistatöökojaga. Tööriista vahetus programmeeritakse ja teostatakse automaatselt üksikute töötlemisetappide vahel.
Keerulise kujuga - kooniliste, astmeliste või kumerate vormijatega - pöörlevate kehade töötlemisel treipinkidel kasutatakse laialdaselt kopeerimise põhimõtet... Selle olemus seisneb selles, et toote vajalik profiil reprodutseeritakse vastavalt spetsiaalselt ettevalmistatud profiilile. malli (koopiamasin) või eeltöödeldud osa kohta. Kopeerimise käigus liigub kopeeriv sõrm mööda mustri kontuuri, millel on lõikuriga sama kuju. Jälgimistihvti liigutused edastatakse automaatselt läbi juhtsüsteemi lõiketeraga toele nii, et lõikuri trajektoor järgiks jälgimissõrme trajektoori.
Detailide töötlemine koopiamasinatel võib oluliselt tõsta detailide kuju ja suuruse reprodutseeritavust (kordavust) ning tööviljakust võrreldes käsitsi universaalsetel masinatel töötlemisega, sest ei kulu tööriistahoidja keeramisele, lõikamisele ja väljaspool freesi mõõtmiste jms jaoks aega. …
Koopiamasinapõhise automatiseerimise teeb aga keeruliseks koopiamasinate ja mallide aeganõudev eeltootmine. Kui toote töötlemine ja mustrite muutmine võtab vähe aega, siis mustri tegemine, mis toimub tavaliselt töömahukate käsitsi toimingutega, võtab kaua aega (vahel mitu kuud).
Vaata ka sellel teemal: Treipinkide elektriseadmed
Puurmasinate elektriseadmed
Puurimismasinad, mis on ette nähtud läbivate või pimeaukude jaoks, aukude viimistlemiseks süvistus- ja hõõritsusega, sisekeermete lõikamiseks, otsapindade ja aukude süvendamiseks.
-
Puurimine - peamine meetod aukude töötlemiseks osade tihedas materjalis. Puuritud augud ei ole reeglina absoluutselt õige silindrilise kujuga. Nende ristlõige on ovaalse kujuga ja pikisuunaline läbilõige on veidi kitsenenud.
-
Andur – on eelnevalt puuritud aukude või valamise ja stantsimise teel tehtud aukude töötlemine, et saada puurimisest täpsem kuju ja läbimõõt.
-
Hõõritamine – see on puuritud ja süvistatud aukude viimane töötlemine, et saada täpsed silindrilised kuju ja läbimõõduga madala karedusega augud.
Universaalseid puurmasinaid on järgmist tüüpi:
-
pingi puurimine;
-
vertikaalne puurimine (ühe spindliga);
-
radiaalne puurimine; multispindel;
-
sügavpuurimiseks.
Joonisel fig 5 on kujutatud radiaalpuurmasina üldvaade.
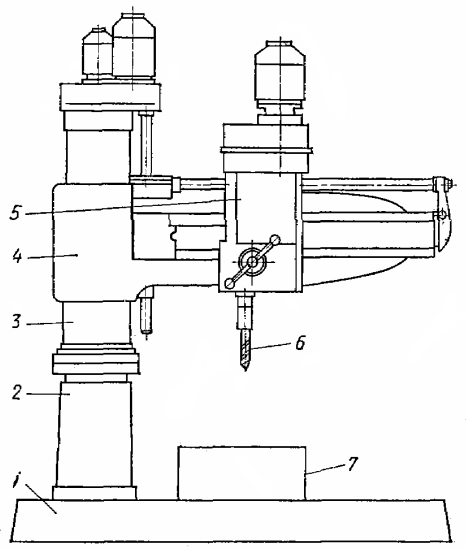
Riis. 5. Radiaalpuurmasina üldvaade
Radiaalpuurpink koosneb alusplaadist 1, mille peal on kolonn 2 koos pöörleva hülsiga 3, mis pöörleb 360O... Traavers 4 liigub mööda hülsi vertikaalsuunas, mida mööda spindlipea (puurimispea) 5 elektriajamiga , mis asub sellel koos kiiruse reduktoridega ja spindli etteanne liigub horisontaalsuunas.
Puurimisel kinnitatakse toode 7 statsionaarsele voodilauale. Puur 6 pöörleb ja liigub üles-alla, tungides samal ajal sügavale tootesse. Istutusmasina pööramise ajam on põhiajam ja ajam on söötja.
Masina juhtimisskeem pakub blokeeringuid, mis piiravad ristpea liikumist äärmuslikes asendites, keelavad töötamise kaitsmata sambaga ja sisaldavad mootorit ristpea tõstmiseks, kui see on kolonnile kinnitatud.
Põhiliikumine: pööratav asünkroonmootor, pööratav pooluslüliti asünkroonmootor, G-D-süsteem koos EMU-ga (raskemetallide lõikemasinatele).
Ajam: mehaaniline peaajamist, hüdrauliline ajam.
Abivahendeid kasutatakse:
- jahutuspump,
-
hüdropump,
-
hülsi tõstmine ja langetamine (radiaalpuurmasinate jaoks),
-
kolonni kinnitus (radiaalpuurmasinate jaoks),
-
tugiliikumine (raskete radiaalpuurmasinate jaoks),
-
treimispuksid (raskete radiaalpuurmasinate jaoks),
-
laua pööramine (moodulmasinate jaoks).
Spetsiaalsed elektromehaanilised seadmed ja blokeeringud:
-
hüdraulilise juhtimise solenoidid,
-
tsükli automatiseerimine suunalülitite abil,
-
automaatne laua kinnitamise juhtimine,
-
automaatne koordinaatide seadistamine programmi juhtimisega (koordinaatide puurmasinate ja koordinaattabelite jaoks).
Puurimismasinad jagunevad järgmisteks osadeks:
-
horisontaalne puurimine;
-
jigi igav;
-
teemantpuurimine;
-
sügavalt igavad masinad.
Horisontaalsete puurmasinatega saab teha järgmisi töid:
-
puurimine;
-
puurivad augud;
-
otste kärpimine;
-
nikerdus;
-
tasapinnaline freesimine.
Puurmasina põhiajami annavad asünkroonsed oravapuuriga mootorid. Spindli kiirust juhitakse käigukasti käike vahetades.
Raskeid horisontaalpuurmasinaid käitavad kahe- või kolmekäigulise käigukastiga alalisvoolumootorid.
Puurmasinate etteandeajami tagab tavaliselt peamootor, mille etteandekast asub spindlipeal.
Universaalsete ja raskete puurmasinate puhul kasutatakse alalisvoolumootori etteandjat vastavalt GD süsteemile (kergematel masinatel kasutatakse PMU-D või EMU-D süsteemi) või TP-D (uute masinate puhul).
Abiseadmeid kasutatakse: jahutuspump, puurvõlli kiire liikumine, määrimispump, käigukasti hammasrataste ümberlülitamine, hammaslati liigutamine ja pingutamine, reostaadi reguleerimislibisemine.
Spetsiaalsed elektromehaanilised seadmed ja blokeeringud: peaajami juhtimise automatiseerimine käigukasti käikude vahetamisel, mikroskoopide valgustusseadmed, seadmed koordinaatide lugemiseks induktiivmuunduriga. Kaasaegsed puurimismasinad on suures osas elektrifitseeritud.
Lisateavet CNC-puurmasina elektriseadmete kohta mudeli 2R135F2 näitel: Elektriseadmed CNC puurmasin
Lihvimismasinate elektriseadmed
Lihvimismasinad Neid kasutatakse peamiselt detailide kareduse vähendamiseks ja täpsete mõõtmete saamiseks.
Lihvimise ajal teostab peamise lõikeliigutuse abrasiivne tööriist - lihvketas. See ainult pöörleb ja selle kiirust mõõdetakse m/s. Ettenihke liigutused võivad olla erinevad, need edastatakse töödeldavale detailile või tööriistale. Lihvkettad koosnevad ühendatud abrasiivteradest, millel on lõikeservad.
Lihvimismasinad jagunevad olenevalt eesmärgist:
- ringikujuline lihvimine;
- sisemine lihvimine;
- tsentriteta lihvimine;
- pinna lihvimine;
- eriline.
Joonisel 6 on kujutatud pinnalihvimismasinate töötlemisskeem koos liigutuste tähistusega, joonisel 7 - ringja välislihvimise skeemid ja joonisel 8 - ringlihvimismasina üldvaade.
Riis. 6. Pindlihvimismasinate töötlemisskeem koos liigutuste tähistusega: a — b — lihvketta perifeerias töötavate horisontaalsete spindlitega (a — ristkülikukujulise lauaga; b — ümarlauaga); c — d — vertikaalsete spindlitega, ühe spindliga, töötades lihvketta tagumise otsaga (c — ümarlauaga; d — ristkülikukujulise lauaga); e - f - kahe spindliga masinad, mis töötavad lihvketta esiküljega (d - kahe vertikaalse spindliga; f - kahe horisontaalse spindliga).
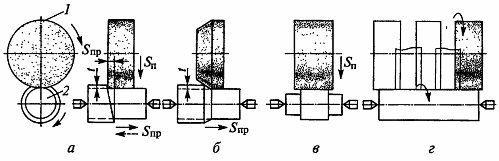
Riis. 7. Ringikujulise välislihvimise skeemid: a — lihvimine pikisuunaliste töökäikudega: 1 — lihvketas; 2 — lihvimisdetail; b — sügavlihvimine; c — lihvimine sügavlõikega; d — kombineeritud lihvimine; Spp — pikisuunaline sööt; Sp — ristsööt; 1 — töötlemise sügavus.
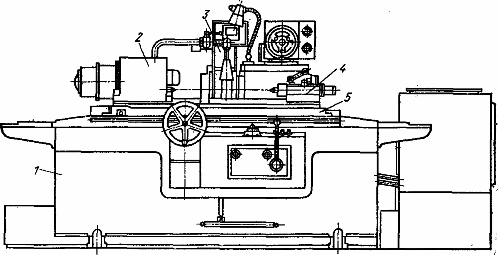
Riis. 8. Silindrilise lihvimismasina üldvaade
Ringlihvimismasin (joonis 8) koosneb järgmistest põhisõlmedest: alus 1, lihvimispea 3, ekskavaator 2, saba 4, sammas 5. Lihvimismasinatel on seade lihvimisketta puhastamiseks (joonisel pole näidatud). Silindrilise lihvimismasina voodi ja laud on näidatud joonisel.
Alumine laud 6 on paigaldatud voodi pikisuunalistele juhikutele, millele on kinnitatud pöörlev ülemine laud 5. Lauda 5 saab keerata kruviga 2 ümber laagri 4 telje.Laua 5 fikseeritud pöörlemine on vajalik koonuspindade töötlemiseks. Alumist lauda liigutab voodi külge kinnitatud hüdrosilinder. Voodile, põikjuhikutele, millel liigub lihvimispea, kinnitatakse plaat.
Lihvimismasinad on täppismasinad, seega peavad nende üksikute sõlmede ja kinemaatiliste jõuülekannete konstruktsioonid olema võimalikult lihtsad, mis saavutatakse üksikute ajamite laialdase kasutamisega. Lihvimismasinates eristatakse järgmisi elektriajamite tüüpe: peaajam (lihvketta pöörlemine), toote pöörlemisajam, ajamiajam, abiajamid ja spetsiaalsed elektromehaanilised seadmed.
Väikestes ja keskmise suurusega lihvimismasinates, mille peaajam võimsus on kuni 10 kW, teostavad ratta pöörlemist tavaliselt ühekiiruselised asünkroonsed oravpuuriga mootorid. Oluliste lihvketta suurustega silindrilised lihvimismasinad (läbimõõt kuni 1000 mm, laius kuni 700 mm) kasutavad mootorist spindlile ülekandeid ja ajamil elektrilist pidurit, et vähendada seiskamisaega.
Sisemiste lihvimismasinate puhul toimub töötlemine väikeste mõõtmetega ringidena, seetõttu kasutatakse kiirendusülekandeid mootorilt spindlile või spetsiaalseid kiireid asünkroonmootoreid, mis on ehitatud lihvimispea korpusesse. Seadet, milles oravaelemendi mootor ja lihvimisvõll on struktuurselt ühendatud üheks tervikuks, nimetatakse elektrispindliks.
peaajam... Töödeldava detaili pööramiseks sisemiste lihvmasinate, oravpuuriga asünkroonmootorite, ühe- või mitme kiirusega… Raskete silindriliste lihvimismasinate puhul toimub toote pöörlemisajam G-D süsteemi järgi ja ajamid türistormuunduritega.
Väikeste lihvimismasinate inning (laua edasi-tagasi liikumine, lihvpea piki- ja põikisuunaline liikumine) toimub hüdraulilise ajamiga. Raskete lame- ja silindriliste lihvimismasinate ajamid teostatakse alalisvoolumootoriga vastavalt EMU-D, PMU-D või TP-D süsteemile, sageli kasutatakse muutuvat hüdroajamit.
Abiajamid kasutatakse: põiki perioodilise etteandega hüdropump, põiki etteanne (raskemetallide lõikepinkide asünkroonne oravmootor või alalisvoolumootor), lihvketta pea vertikaalliikumine, jahutuspump, määrdepump, konveier ja pesu, magnetfilter.
Spetsiaalsed elektromehaanilised seadmed ja blokeeringud: elektromagnetilised lauad ja plaadid; demagnetisaatorid (osade demagnetiseerimiseks); jahutusvedeliku magnetfiltrid; loe tsüklite arv ringi riietamiseks; aktiivne juhtimisseade.
Elektromagnetilisi plaate ja pöörlevaid elektromagnetilisi laudu kasutatakse laialdaselt pinnalihvimismasinates terase ja malmi toorikute kiireks ja usaldusväärseks kinnitamiseks. Täppislihvimismasinatel kasutatakse püsimagnetilisi kinnitusplaate (magnetplaate).
Tootlikkuse suurendamiseks ja suure täpsuse tagamiseks on igat tüüpi kaasaegsed lihvimismasinad varustatud aktiivsete juhtimisseadmetega - mõõteseadmetega maapealsete osade aktiivseks juhtimiseks nende töötlemise ajal ja vastavate käskude saatmiseks masina juhtimissüsteemi.
Nõutava tooriku suuruse saavutamisel lülitub masin automaatselt välja.Töötaja ei peata masinat tooriku mõõtmete kontrollimiseks. Ta lihtsalt eemaldab valmis osa, paigaldab uue osa ja käivitab masina.
Lihtsaim mõõteseade detailide mõõtmete automaatseks juhtimiseks sisemiste lihvmasinate töötlemise ajal on mõõtur, mis tuuakse perioodiliselt toorikule.
Pideva osakoormusega pinnalihvijatel kasutatakse masina automaatseks reguleerimiseks elektrokontakti mõõteseadmeid.
Freespinkide elektriseadmed
Freespingid töötlevad lamedaid, vormitud pindu, sooni, lõikavad välis- ja sisekeermeid, hammasrattaid ning sirgete ja spiraalsete hammastega lõikeriistu (freesid, hõõritsad jne). Freesid-mitmehammas (mitme otsaga tööriist). Iga lõikehammas on kõige lihtsam lõikur. Horisontaalse freesi üldvaade on näidatud joonisel 9. Peamised freeside tüübid on näidatud joonisel 10.

Riis. 9. Horisontaalse freespingi üldvaade
Lõikeriist (frees 4) on paigaldatud võlli 5 kinnitatud südamikule 3 ja riiulil 1 asuvale vedrustusele 2. Masina põhiliikumine on lõikuri pöörlemine, mida pöörab sees asuv põhiajam. voodi. Toode 6 on paigaldatud lauale 7, mis liigub lõikuri pöörlemissuunas piki pöörleva plaadi 8 juhikuid, mis on paigaldatud liugurile 9, liikudes piki konsooli 10 lõikuri pöörlemisega risti. Konsool ise liigub vertikaalsuunas mööda voodi II juhikuid.
Masina etteanaliikumine on toote liikumine. Põhisöötmine — laua pikisuunaline etteanne lõikuri pöörlemissuunas.Laua etteandeseade asub konsooli sees. Masin pakub ka liugurite ristsöödet ja sulgude vertikaalset etteannet. Pöörleva plaadi olemasolu võimaldab pöörata lauda horisontaaltasandil ja asetada vajaliku nurga all. Lihtsates freespinkides pole pöörlevat plaati.
Vertikaalsed freesid on üldiselt ehitatud samadel alustel kui horisontaalfreesid, neil on sisuliselt sama konstruktsioon, välja arvatud alus, spindliüksus, millesse see on vertikaalselt paigaldatud. On olemas vertikaalfreespinke, kus spindel on paigaldatud spindlipeasse, mis pöörleb vertikaaltasandil laua tasapinna suhtes teatud nurga all. Vertikaalsete lõikurite etteandemehhanismides pöördlaud puudub.
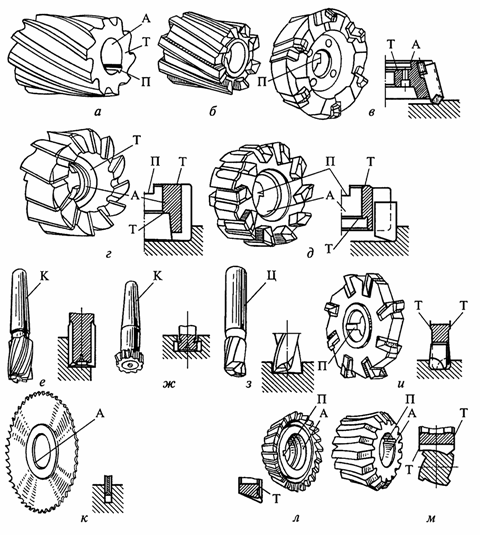
Joonis fig. 10. Peamised lõikurite tüübid: a, b - silindrilised; c, d, e — lõpp; f, g — lõpp; h — võti; i- ketas kahe- ja kolmepoolne; k — pilu ja segment; l — nurk; m — kujuline; A — silindriliste või kooniliste aukudega noad; T — otsaalused freeside kinnitamiseks; P — piki- ja põikivõtmetega lõikurid; K ja Ts — koonilised ja silindrilised otsafreesid
Põhiajam. Väikeste ja keskmise suurusega freespinkide põhiliikumise juhtimiseks kasutatakse ühe- või mitmekäigulisi asünkroonseid oravpuuriga mootoreid koos käigukastiga. Mootorid on tavaliselt äärikutega. Selliste masinate käitamist teostab enamikul juhtudel peamasin läbi mitmeastmelise toitekasti.
Raskete kihtidega freespinkide põhiajami teostavad ka asünkroonsed mootorid, millel on spindli nurkkiiruse mehaaniline muutus.
Juhtimisseade.Selliste masinate etteandelaudade ja freespeade ajamite jaoks kasutatakse alalisvoolumootoreid, mis lülitatakse G-D süsteemi järgi sisse ergutina EMU-ga. Praegu kasutatakse selliste ajamite jaoks TP-D süsteemi ja sagedusjuhtimisega asünkroonset elektriajamit.
Abiajamid Kasutatakse freespeade kiireks liigutamiseks, risttala liigutamiseks (pikilõikuritel), ristlattide kinnitamiseks, jahutuspump, määrdepump, hüdropump.
Horisontaalsetes freespinkides paigaldatakse äärikmootorid tavaliselt voodi tagaseinale ja vertikaalfreespinkides kõige sagedamini vertikaalselt voodi ülaossa. Eraldi elektrimootori kasutamine sööturi jaoks lihtsustab oluliselt freespinkide disaini. See on vastuvõetav, kui masinal hammasratast ei lõigata.
Tarkvaratsükli juhtimissüsteemid on freespinkides tavalised. Neid kasutatakse ristkülikukujuliseks vormimiseks. Kumerate kontuuride töötlemiseks kasutatakse laialdaselt arvjuhtimisskeeme.
Kopeerimisfreesid on mõeldud ruumiliselt keerukate pindade töötlemiseks mudelite kopeerimise teel. Neid masinaid kasutatakse hüdrauliliste turbiinirataste, sepistamis- ja mulgustamisstantside, lineaar- ja pressstantside jms valmistamiseks. Selliste toodete töötlemine universaalsetel masinatel on praktiliselt võimatu.
Kõige levinumad on elektrilise jälgimisega koopiamasinad-freesmasinad – elektrokoopiamasinad.
Vaata ka sellel teemal: Freespinkide elektriseadmed
Höövelmasinate elektriseadmed
Höövelmasinate rühma kuuluvad põikhöövlid, höövlid ja freespingid.Höövlite iseloomulikuks tunnuseks on lõikuri või detaili edasi-tagasi liikumine hööveldamisrežiimiga edasikäigu ajal ja katkendliku ristsöötmise teostamine pärast lõikuri või detaili iga üksikut või kahekordset käiku.
Suurte detailide planeerimiseks kasutatakse lõikemasinaid. Need masinad on saadaval erinevates suurustes laua pikkusega 1,5 - 12 m.
Höövli üldvaade on näidatud joonisel fig. üksteist.
Riis. 11. Riivi üldvaade
Nendes masinates on toorik 1 kinnitatud lauale 2, mis teostab edasi-tagasi liikumist, ja frees 3, mis on kinnitatud vertikaaltoele 4, mis on paigaldatud traaversile 5, jääb paigale. Hööveldamine toimub laua töökäiguga ettepoole ja tagurpidikäiguga tõstetakse frees üles. Pärast iga laua tagasikäiku liigub lõikur põikisuunas, tagades põiki etteande.
Laua pikisuunaline liikumine töökäigu ajal on põhiliikumine ja lõikuri liikumine on etteanaliigutus. Abiliigutused on ristpea ja masinakelgude kiired liigutused, lõikuri tõstmine laua tagasitõmbamisel ja seadistamistoimingud.
Höövlitel on peaajam, ristsööt ja abiajam. Höövli elektriline põhiajam tagab töödeldava detaili laua edasi-tagasi liikumise. Elektriajam on pööratav. Kui laud liigub ettepoole, koormatakse põhimootorit vastavalt lõiketingimustele ja tahapoole liikudes kasutatakse mootorikoormust ainult laua liigutamiseks koos detailiga ilma hööveldamiseta.Elektriajam tagab lõikekiiruse sujuva juhtimise.
Höövli elektriline põhiajam tagab masina tehnoloogilise protsessi vastavalt tabeli kiirusgraafikule. Höövli peamise elektriajami töö on seotud suurte käivitus- ja pidurdusmomentidega sagedaste pööretega. Pikihöövlitel juhib lauda alalisvoolumootor, mis töötab türistormuunduritega.
Sadula etteanne Hööveldatakse perioodiliselt iga kahekordse laua käigu kohta, tavaliselt tagurdamisel sirgele, ja see tuleb lõpetada enne lõikamise algust. Sellise toiteallika realiseerimiseks kasutatakse mehaanilisi, elektrilisi, hüdraulilisi, pneumaatilisi ja segaajamisüsteeme, millest levinumad on elektromehaanilised, mida teostatakse vahelduvvoolu asünkroonmootoriga kruvi- või hammaslattmehhanismide abil.
Abiajamid, mis tagavad risttala ja tugede kiire liikumise, aga ka lõikurite tõstmise laua tagasilöögi ajal, teostavad vastavalt asünkroonsed mootorid ja elektromagnetid.
Höövelmasina automaatjuhtimise skeem tagab kõigi ajamite juhtimise masina vajalike tehnoloogiliste töörežiimide jaoks. See pakub automaatseid ja käivitusrežiime. Skeem sisaldab elektriajamite ja masinate mehhanismide kaitseid, tehnoloogilisi blokeeringuid, sh blokeeringuid, mis piiravad laua liikumist edasi- ja tagasisuunas.