Freespinkide elektriseadmed
 Freespingid on ette nähtud välis- ja sisepindade lamedate ja vormitud pindade töötlemiseks, lõikamiseks, välis- ja sisekeermete, hammasrataste jms lõikamiseks. Nende masinate eripäraks on töötööriist — paljude lõiketeradega frees. Peamine liikumine on lõikuri pöörlemine ja etteanne on toote liikumine koos lauaga, millele see on kinnitatud. Töötlemise ajal eemaldab iga lõikeserv osa lõikuri pöördest laastud ja laastu ristlõige muutub pidevalt väikseimast suurimaks. Lõikureid on kaks rühma: üldotstarbelised (nt horisontaal-, vertikaal- ja pikifreesimine) ja spetsiaalsed (nt koopiafreesimine, hammasratasfreesimine).
Freespingid on ette nähtud välis- ja sisepindade lamedate ja vormitud pindade töötlemiseks, lõikamiseks, välis- ja sisekeermete, hammasrataste jms lõikamiseks. Nende masinate eripäraks on töötööriist — paljude lõiketeradega frees. Peamine liikumine on lõikuri pöörlemine ja etteanne on toote liikumine koos lauaga, millele see on kinnitatud. Töötlemise ajal eemaldab iga lõikeserv osa lõikuri pöördest laastud ja laastu ristlõige muutub pidevalt väikseimast suurimaks. Lõikureid on kaks rühma: üldotstarbelised (nt horisontaal-, vertikaal- ja pikifreesimine) ja spetsiaalsed (nt koopiafreesimine, hammasratasfreesimine).
Sõltuvalt laua liikumisvabadusastmete arvust on konsoolfreesimine (kolm liigutust - piki-, põiki- ja vertikaalne), mittekonsoolfreesimine (kaks liigutust - piki- ja põikisuunaline), pikifreesimine (üks liigutus - pikisuunaline) ja pöörlevad freespingid (ühe liigutusega – ringsöötmine).Kõigil neil masinatel on sama põhiajam spindli pöörlevaks liikumiseks ja erinevad ajamiseadmed.
Paljundusfreespinke kasutatakse ruumiliselt keerukate tasapindade töötlemiseks mallide järgi kopeerimise teel. Näitena saame tuua stantside, pressvormide, hüdroturbiinide tiivikute jms pinnad. Universaalsete masinatega on selliste pindade töötlemine liiga keeruline või isegi võimatu. Paljud neist kõige tavalisematest masinatest on elektrilise järelkontrolliga koopiamasinad.
Universaalse freesi 6H81 seade on näidatud joonisel 1. Masin on mõeldud erinevate suhteliselt väikese suurusega detailide freesimiseks.
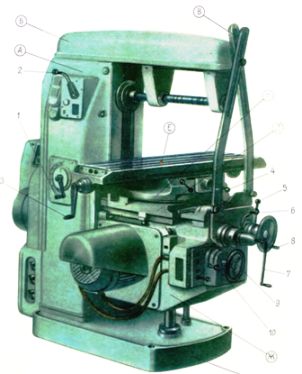
Riis. 1 Universaalse freesi mudeli 6H81 seade
Peatoe korpus sisaldab spindli mootorit, käigukasti ja lõikuri spindlit. Spindli pea liigub mööda traaversi juhikuid mööda oma telge ja traavers omakorda mööda vertikaalsete juhikutega fikseeritud alust.
Seega on masinal kolm üksteisega risti olevat liikumist: laua horisontaalne liikumine, spindlipea vertikaalne liikumine koos traversiga, spindlipea põikisuunaline liikumine piki selle telge. Mahuline töötlemine toimub horisontaalsete või vertikaalsete joontega. Tööriist: sõrmsilindrilised ja koonilised või otsafreesid.
Freespinkide elektriseadmete hulka kuuluvad peaajam, toiteallikas, abiajamid, erinevad elektriseadmed juhtimiseks, jälgimiseks ja kaitseks, signalisatsioonisüsteemid ja masina lokaalne valgustus.
Freespinkide elektriajam
Lõikuri põhiliikumise ajam: asünkroonne oravapuuri mootor; asünkroonne pooluste vahetamise mootor. Peatus: elektromagneti vastuseis. Kogu kontrollvahemik (20–30): 1.
Ajamimehhanism: mehaaniline peaajamist, asünkroonne oravpuuriga mootor, pooluste vahetamise mootor (pikilõikurite laua liikumine), G-D süsteem (laua liikumine ja pikilõikepeade etteandmine), G-D süsteem EMU-ga (tabel pikisuunalised lõikurid); tristoraalne ajam, muutuv hüdroajam. Kogu reguleerimisvahemik 1: (5–60).
Abiajamid kasutatakse: freespeade kiireks liigutamiseks, risttala liigutamiseks (pikifreeside puhul); ristvarraste kinnitus; jahutuspump; määrdepump, hüdropump.
Horisontaalsetes freespinkides paigaldatakse äärikmootorid tavaliselt voodi tagaseinale ja vertikaalfreespinkides kõige sagedamini vertikaalselt voodi ülaossa. Eraldi elektrimootori kasutamine sööturi jaoks lihtsustab oluliselt freespinkide disaini. See on vastuvõetav, kui masinal hammasratast ei lõigata. Tarkvaratsükli juhtimissüsteemid on freespinkides tavalised. Neid kasutatakse ristkülikukujuliseks vormimiseks. Kumerate kontuuride töötlemiseks kasutatakse laialdaselt digitaalseid juhtimissüsteeme.
Voodifreespingid kasutavad tavaliselt iga spindli käitamiseks eraldi oravapuuri asünkroonmootoreid ja mitmekäigulisi käigukaste. Spindli ajamite kiiruse reguleerimisvahemikud ulatuvad 20:1.Spindli mootorite juhtimisahelad, mis ei osale detaili töötlemisel, lülitatakse juhtlülititega välja. Töötava spindliajami peatamine toimub alles pärast etteande täielikku seiskumist. Selleks paigaldatakse ahelasse ajarelee. Etteandemootorit saab käivitada alles pärast spindlimootori sisselülitamist.
Raskete freespinkide lauaajam peaks tagama ettenihke 50 kuni 1000 mm / min. Lisaks on vaja lauda kiiresti liigutada kiirusega 2–4 m / min ja aeglast liikumist masina kiiruse seadistamisel 5–6 mm/min. Lauaarvuti draivi kogukiiruse reguleerimisvahemik ulatub 1:600-ni.
Raskete pikifreespinkide puhul on elektriajam EMP-ga G-D süsteemi järgi tavaline. Vertikaalsete ja horisontaalsete (külgmiste) peatugede elektriajamid on sarnased laua ajamiga, kuid on palju väiksema võimsusega. Kui peapatjade samaaegne liigutamine pole vajalik, kasutatakse kõigi patjade ajamite jaoks ühist muunduriplokki. See juhtimine on lihtsam ja odavam. Spindlite aksiaalne liikumine toimub sama etteandeajamiga. Selleks lülitatakse kinemaatiline ahel vastavalt ümber. Liigutatavate pukkvooditega rasketes freespinkides kasutatakse selle liigutamiseks ka eraldi elektrimootorit.
Mõne lõikuri töö sujuvamaks muutmiseks kasutatakse hoorattaid. Tavaliselt paigaldatakse need freespingi veovõllile.Hammasrataste lihvimismasinates tagatakse vajalik vastavus põhiliikumise ja etteande liikumise vahel, ühendades etteandeahela mehaaniliselt põhiliikumise ahelaga.
Lõikemasinate elektriseadmed. Peaajam: asünkroonne oravapuuriga mootor. Ajam: mehaaniline peaajamist. Abiajamid kasutatakse: klambri ja tagarelsi kiireks liigutamiseks, freespea liigutamiseks, sõlme eraldamiseks, laua pöörlemiseks, jahutuspumbaks, määrdepumbaks, hüdrauliliseks tühjenduspumbaks (rasketele masinatele).
Spetsiaalsed elektromehaanilised seadmed ja blokeeringud: seade tsüklite arvu lugemiseks, automaatsed seadmed tööriista mõõtmete kulumise kompenseerimiseks.
Paljud lõikemasinad kasutavad arvutusseadmeid. Neid kasutatakse pardlitel läbipääsude loendamiseks, hammasrataste eellõikamismasinatel, osade arvu loendamiseks ja töödeldud osade arvu lugemiseks.
Hammasrataste vormimismasinates tehakse põhiline edasi-tagasi liikumine vändade ja ekstsentriliste hammasrataste abil. Hammasrataste vormimismasinate elektriseadmed pole keerulised. Magnetkäivitusi kasutatakse koos "jokkeri" täiendava juhtimisega (kasutuselevõtmiseks). Ajami peatamine toimub enamasti elektromagneti abil.
Joonisel fig. 2. näitab mudeli 6R82SH freespingi elektrilist skeemi
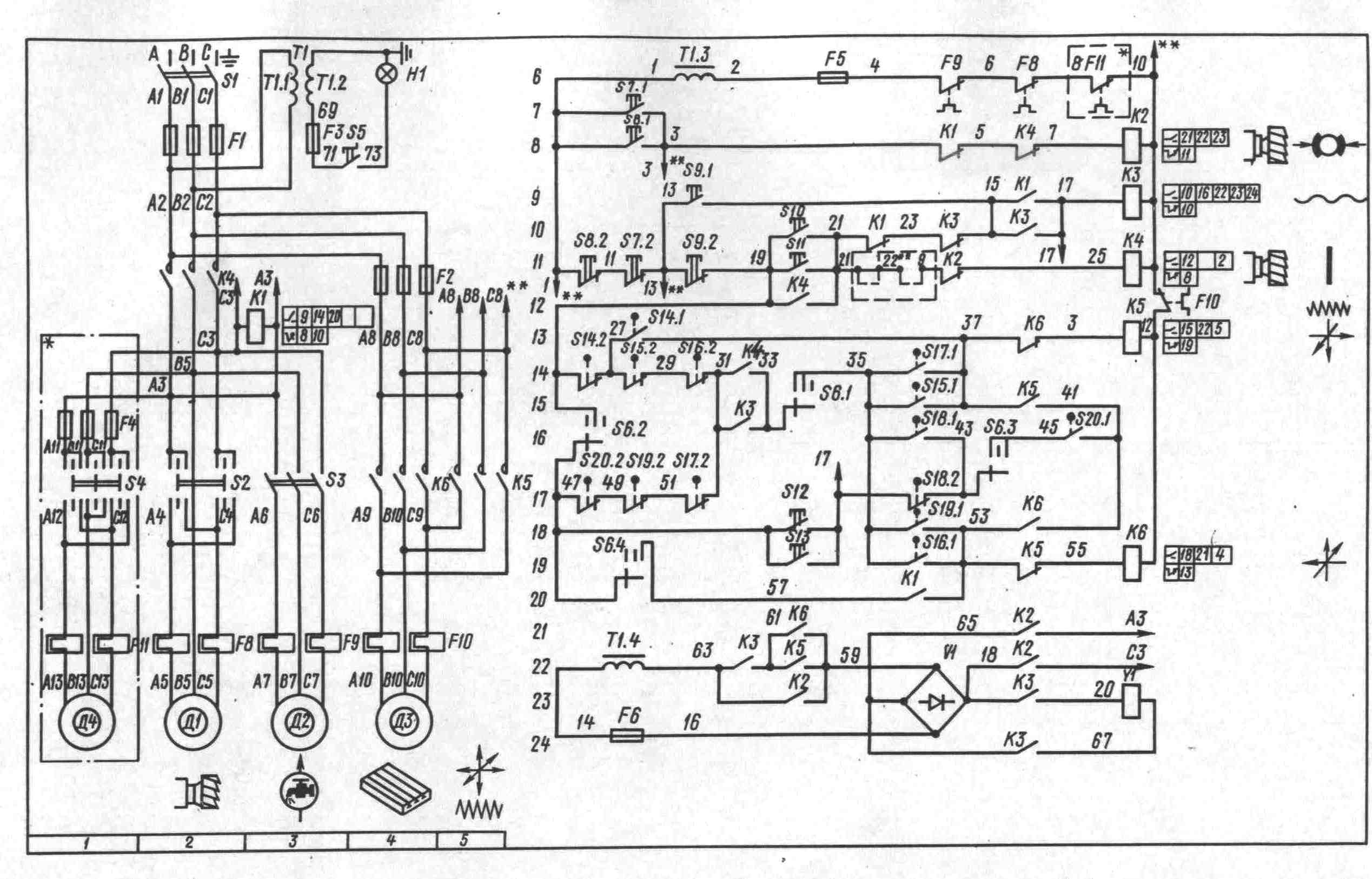
Riis. 2. Freespingi elektriline skemaatiline diagramm (suurendamiseks klõpsake pildil)
Töökohta valgustab lokaalne valgustuslamp, mis on paigaldatud masina voodist vasakule.Konsoolis asub elektromagnet kiireks liikumiseks. Juhtnupud paigaldatud konsooliklambritele ja voodi vasakule küljele. Kõik juhtseadmed asuvad neljal paneelil, mille esiküljel on kuvatud järgmiste juhtnuppude käepidemed: S1 — sisendlüliti; S2 (S4) — spindli tagurduslüliti; S6 — režiimilüliti; C3 — jahutuslüliti. Erinevalt teistest masinatest on 6R82SH ja 6R83SH masinatel kaks elektrimootorit horisontaalse ja pöörleva tihvti lõikuri juhtimiseks.
Elektriahel võimaldab masinal töötada järgmistes režiimides: juhtimine käepidemete ja juhtnuppudega, laua pikisuunaliste liikumiste automaatjuhtimine, ringlaud. Töörežiimi valimine toimub lülitiga S6. Toitemootori sisse- ja väljalülitamine toimub pikisuunalise etteande (S17, S19), vertikaalse ja põiksuunalise etteande (S16, S15) piirlülititele mõjutavate käepidemete abil.
Spindli lülitatakse sisse ja välja vastavalt nuppude «Start» ja «Stop» abil. Kui vajutada nuppu Stop, lülitub etteandemootor välja ka siis, kui spindli mootor on välja lülitatud. Laua kiire liikumine toimub siis, kui vajutada nuppu S12 (S13) «Kiire». Spindli mootoriga pidurdamine on elektrodünaamiline. Nuppude S7 või S8 vajutamisel lülitub sisse kontaktor K2, mis ühendab mootori mähise alalditel tehtud alalisvooluallikaga. Nuppe S7 või S8 tuleb vajutada, kuni mootor täielikult seiskub.
Freespingi automaatjuhtimine toimub lauale paigaldatud nukkide abil.Laua liikumisel teevad pikisuunalisele etteandekäepidemele ja ülemisele käigule mõjuvad nukid piirlülititega elektriahelas vajalikud lülitid. Elektriahela toimimine automaatses tsüklis - kiirlähenemine - töötoide - kiire väljatõmbamine. Ümarlaua pöörlemist teostab etteandemootor, mille käivitab kontaktor K6 samaaegselt spindlimootoriga. Ümarlaua kiire liikumine toimub siis, kui vajutada nuppu «Fast», mis lülitab sisse kiire elektromagneti kontaktori K3.