Kondensaatormootorid — seade, tööpõhimõte, rakendus
 Selles artiklis räägime kondensaatormootoritest, mis on tegelikult tavalised asünkroonsed mootorid, mis erinevad ainult võrguga ühendamise viisist. Puudutagem kondensaatorite valiku teemat, analüüsime võimsuse täpse valiku vajaduse põhjuseid. Märgime ära peamised valemid, mis aitavad ligikaudselt hinnata vajalikku võimsust.
Selles artiklis räägime kondensaatormootoritest, mis on tegelikult tavalised asünkroonsed mootorid, mis erinevad ainult võrguga ühendamise viisist. Puudutagem kondensaatorite valiku teemat, analüüsime võimsuse täpse valiku vajaduse põhjuseid. Märgime ära peamised valemid, mis aitavad ligikaudselt hinnata vajalikku võimsust.
Kondensaatori mootorit nimetatakse asünkroonne mootor, staatori ahelas, millesse on lisatud täiendav mahtuvus, et tekitada staatori mähistes voolu faasinihe. See kehtib sageli ühefaasiliste ahelate kohta, kui kasutatakse kolmefaasilisi või kahefaasilisi asünkroonmootoreid.
Asünkroonmootori staatorimähised on üksteisest füüsiliselt nihutatud ja üks neist on ühendatud otse vooluvõrku, teine või teine ja kolmas on aga ühendatud vooluvõrku kondensaatori kaudu.Kondensaatori võimsus valitakse nii, et mähiste vaheliste voolude faasinihe oleks 90 ° või vähemalt selle lähedal, siis antakse rootorile maksimaalne pöördemoment.
Sel juhul peavad mähiste magnetilise induktsiooni moodulid osutuma samaks, nii et staatori mähiste magnetväljad nihkuvad üksteise suhtes nii, et kogu väli pöörleb ringis, mitte ellips, tõmmates rootorit suurima efektiivsusega kaasa.
Ilmselgelt on vool ja selle faas üle kondensaatori ühendatud mähises seotud nii kondensaatori mahtuvuse kui ka pooli efektiivse impedantsiga, mis omakorda sõltub rootori kiirusest.
Mootori käivitamisel määrab mähise impedantsi ainult selle induktiivsus ja aktiivtakistus, seega on see käivitamisel suhteliselt väike ja siin on optimaalse käivitamise tagamiseks vaja suuremat kondensaatorit.
Kui rootor kiirendab nimikiiruseni, indutseerib rootori magnetväli staatori mähistes elektromagnetvälja, mis suunatakse vastu mähist varustavat pinget – mähise vooluefektiivne takistus suureneb ja nõutav mahtuvus väheneb.
Igas režiimis (käivitusrežiim, töörežiim) optimaalselt valitud võimsuse korral on magnetväli ümmargune ning siin on olulised nii rootori kiirus ja pinge kui ka mähiste arv ja vooluga ühendatud mahtuvus . Kui mõne parameetri optimaalset väärtust rikutakse, muutub väli elliptiliseks ja mootori omadused vähenevad vastavalt.
Erineva otstarbega mootorite puhul on kondensaatori ühendusskeemid erinevad.Kui need on olulised Käivitusmoment, kasutage suurema mahutavusega kondensaatorit, et tagada käivitamisel optimaalne vool ja faas. Kui käivitusmoment ei ole eriti oluline, siis pööratakse tähelepanu ainult optimaalsete tingimuste loomisele töörežiimi jaoks nimipööretel ja võimsus valitakse nimipöörete arvu järgi.
Üsna sageli kasutatakse kvaliteetse käivitamise jaoks käivituskondensaatorit, mis on käivitamisel paralleelselt ühendatud suhteliselt väikese mahutavusega töötava kondensaatoriga, nii et pöörlev magnetväli on käivitamisel ringikujuline, seejärel käivitatakse. kondensaator on välja lülitatud ja mootor töötab edasi ainult siis, kui kondensaator töötab. Erijuhtudel kasutatakse erinevate koormuste jaoks lülitatavate kondensaatorite komplekti.

Kui käivituskondensaatorit pärast mootori nimikiiruse saavutamist kogemata lahti ei ühendata, väheneb mähiste faasinihe, see ei ole optimaalne ja staatori magnetväli muutub elliptiliseks, mis halvendab mootori jõudlust. Mootori tõhusaks tööks on hädavajalik valida õige käivitus- ja töövõime.
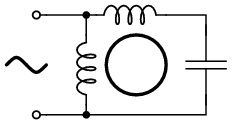
Joonisel on kujutatud praktikas kasutatavad tüüpilised kondensaatorimootori lülitusskeemid. Näiteks kaaluge kahefaasilist oravpuuriga mootorit, mille staatoril on kaks mähist, et toita kahte faasi A ja B.
Kondensaator C sisaldub staatori lisafaasi vooluringis, seetõttu voolavad voolud IA ja IB staatori kahes mähises kahes faasis. Mahtuvuse olemasolul saavutatakse voolude IA ja IB faasinihe 90 °.
Vektordiagramm näitab, et võrgu koguvool moodustub kahe faasi IA ja IB voolude geomeetrilisest summast. Valides mahtuvuse C, saavutavad nad mähiste induktiivsustega sellise kombinatsiooni, et voolude faasinihe on täpselt 90 °.
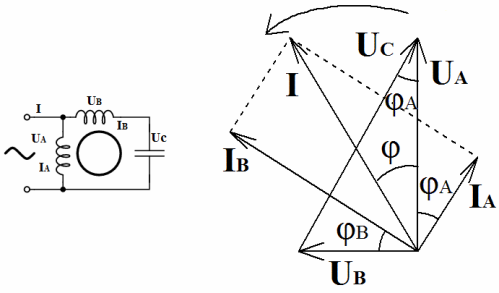
Voolu IA jääb rakendatud liinipingest UA maha nurga φA võrra ja vool IB jääb teise mähise klemmidele antud pingest UB praegusel hetkel maha nurga φB võrra. Võrgupinge ja teisele mähisele rakendatud pinge vaheline nurk on 90 °. Kondensaatori USC pinge moodustab vooluga IV 90 ° nurga.
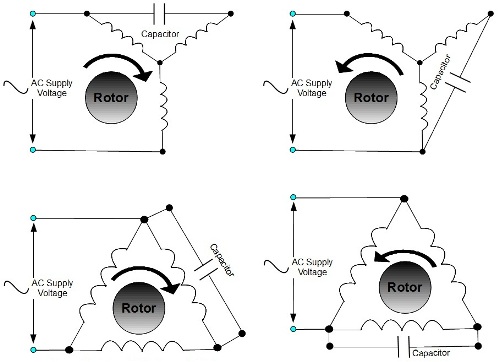
Diagramm näitab, et faasinihke täielik kompenseerimine φ = 0 juures saavutatakse siis, kui mootori poolt võrgust tarbitav reaktiivvõimsus on võrdne kondensaatori C reaktiivvõimsusega. Joonisel on näidatud tüüpilised ahelad kolmefaasiliste mootorite kaasamiseks. staatori mähisahelates olevad kondensaatorid.
Tänapäeval toodab tööstus kahefaasilisi kondensaatormootoreid. Kolmefaasilist saab hõlpsasti käsitsi muuta, et toita ühefaasilisest võrgust. Samuti on väikesed kolmefaasilised modifikatsioonid, mis on juba optimeeritud kondensaatoriga ühefaasilise võrgu jaoks.
Neid lahendusi leidub sageli kodumasinates, nagu nõudepesumasinad ja toaventilaatorid. Tööstuslikud tsirkulatsioonipumbad, ventilaatorid ja lõõrid kasutavad oma töös sageli ka kondensaatormootoreid. Kui ühefaasilisse võrku on vaja kaasata kolmefaasiline mootor, kasutatakse faasinihkega kondensaatorit, see tähendab, et mootor muudetakse uuesti kondensaatoriks.

Kondensaatori võimsuse ligikaudseks arvutamiseks kasutatakse tuntud valemeid, milles piisab mootori toitepinge ja töövoolu asendamisest ning vajalikku võimsust on lihtne arvutada. mähiste täht- või kolmnurkühendus.
Mootori töövoolu leidmiseks piisab selle andmesildilt andmete lugemisest (võimsus, kasutegur, koosinus phi) ja ka valemis asendamine. Käivituskondensaatorina on tavaks paigaldada kaks korda töökondensaatorist suurem kondensaator.

Kondensaatormootorite eelised, tegelikult - asünkroonsed, hõlmavad peamiselt ühte - võimalust ühendada kolmefaasiline mootor ühefaasilise võrguga. Puuduste hulgas on vajadus konkreetse koormuse jaoks optimaalse võimsuse järele ja modifitseeritud siinuslaine inverterite toiteallika vastuvõetamatus.
Loodame, et see artikkel oli teile kasulik ja nüüd saate aru, mis on asünkroonmootorite kondensaatorid ja kuidas nende võimsust valida.