Asünkroonsete mootorite tüübid, sordid, millised on mootorid
Vahelduvvoolumootorid, mis kasutavad tööks staatori pöörlevat magnetvälja, on praegu väga levinud elektrimasinad. Neid, milles rootori kiirus erineb staatori magnetvälja pöörlemissagedusest, nimetatakse asünkroonmootoriteks.

Energiasüsteemide suure võimsuse ja elektrivõrkude pika pikkuse tõttu toimub tarbijate energiavarustus alati vahelduvvoolul. Seetõttu on loomulik püüelda vahelduvvoolu elektrimootorite maksimaalse kasutamise poole. Tundub, et see vabastab teid mitme energia muundamise vajadusest.
Kahjuks jäävad vahelduvvoolumootorid oma omaduste ja eriti juhitavuse poolest alalisvoolumootoritele oluliselt alla, mistõttu kasutatakse neid peamiselt paigaldistes, kus kiiruse reguleerimine pole vajalik.
Suhteliselt hiljuti juhitud vahelduvvoolusüsteemid koos vahelduvvoolumootorite ühendamisega sagedusmuundurid.
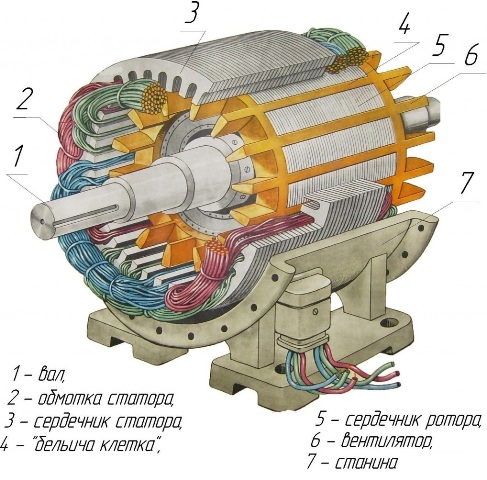
Oravpuuri asünkroonmootor on pöörlev trafo, mille primaarmähis on staator ja sekundaarmähis on rootor. Staatori ja rootori vahel on õhupilu. Nagu igal päristrafol, on ka igal mähisel oma takistus.
Kui mootor on ühendatud vooluvõrku, tekib staatoris magnetväli, mis pöörleb sünkroonselt võrgu sagedusega. Elektromagnetilise induktsiooni nähtuse tõttu staatori magnetvälja toimel elektriliselt suletud rootori mähistes, elektrit.
Rootoris indutseeritud elektrivool loob oma magnetvälja, mis interakteerub staatori pöörleva magnetväljaga. Selle tulemusena hakkab rootor pöörlema ja mootori võllile ilmub staatori vooluga võrdeline mehaaniline moment.
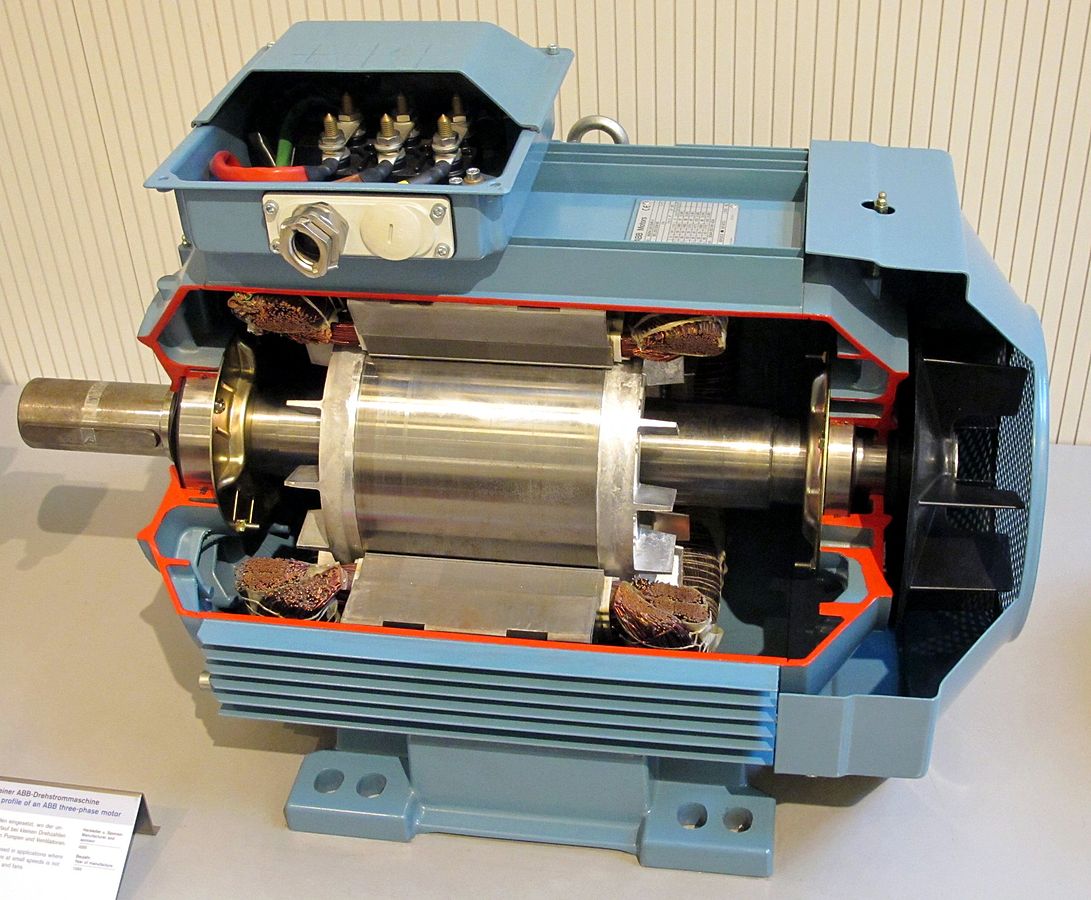
Kolmefaasilise asünkroonmootori sektsioonmudel
Asünkroonmootori iseloomulik tunnus on see, et staatori ja rootori väljade vastasmõju tõttu on mootori võlli pöörlemiskiirus veidi väiksem kui toitevõrgu sagedus. Võrgu sageduse ja pöörlemiskiiruse erinevust nimetatakse libisemine.
Asünkroonmootoreid kasutatakse nende valmistamise lihtsuse ja kõrge töökindluse tõttu laialdaselt erinevates majandus- ja tootmissektorites. Vahepeal on neli peamist asünkroonmootori tüüpi:
-
ühefaasiline asünkroonne oravpuuriga mootor;
-
kahefaasiline oravapuuriga asünkroonmootor;
-
kolmefaasiline oravapuuriga asünkroonmootor;
-
kolmefaasiline mähitud rootoriga asünkroonmootor.

Ühefaasiline asünkroonmootor sisaldab ainult ühte töötavat staatorimähist, millele mootori töötamise ajal antakse vahelduvvool.Kuid mootori käivitamiseks on selle staatoril lisamähis, mis on kondensaatori või induktiivsuse kaudu korraks võrku ühendatud või on lühises. See on vajalik esialgse faasinihke tekitamiseks, et rootor pöörlema hakkaks, vastasel juhul ei suruks pulseeriv staatori magnetväli rootorit paika.
Sellise mootori rootor, nagu iga orav-rootor asünkroonmootor, on silindriline südamik, millel on vormitud alumiiniumkanalid ja koos vormitud ventilatsiooniribidega. Sellist oravapuurirootorit nimetatakse oravapuurirootoriks. Ühefaasilisi mootoreid kasutatakse väikese võimsusega rakendustes, nagu ruumiventilaatorid või väikesed pumbad.

Kahefaasilised asünkroonmootorid on kõige tõhusamad, kui nad töötavad ühefaasilises vahelduvvooluvõrgus. Need sisaldavad kahte töötavat staatori mähist, mis asuvad risti ja üks mähistest on ühendatud otse vahelduvvooluvõrku ja teine faasinihke kondensaatori kaudu, nii et saadakse pöörlev magnetväli ja ilma kondensaatorita ühendab rootor ise. mitte liigutada.
Nendel mootoritel on ka oravpuuriga rootor ja nende kasutusala on palju laiem kui ühefaasilistel. Nüüd on pesumasinad ja erinevad masinad. Ühefaasilistest võrkudest tarnitavaid kahefaasilisi mootoreid nimetatakse kondensaatormootoriteks, kuna faasinihke kondensaator on sageli nende lahutamatu osa.

Kolmefaasiline asünkroonmootor sisaldab kolme üksteise suhtes nihutatud staatori mähist, nii et kolmefaasilise võrguga ühendamisel nihkuvad nende magnetväljad ruumis üksteise suhtes 120 kraadi võrra.Kui kolmefaasiline mootor on ühendatud kolmefaasilise vahelduvvooluvõrku, tekib pöörlev magnetväli, mis juhib puuri rootorit.
Kolmefaasilise mootori staatorimähiseid saab ühendada täht- või kolmnurkühenduses ning mootori toiteks on vaja suuremat pinget kui kolmikühenduses, mistõttu on mootoril ette nähtud näiteks kaks pinget: 127 / 220 või 220/380. Kolmefaasilised mootorid on asendamatud erinevate metallilõikuspinkide, vintside, ketassaagide, kraanade jms juhtimiseks.

Faasirootoriga kolmefaasilisel asünkroonmootoril on ülalkirjeldatud mootoritüüpidega sarnane staator, lamineeritud magnetahel, mille kanalitesse on paigutatud kolm mähist, kuid alumiiniumvardaid ei valata faasirootorisse ja faasi kolmefaasiline mähis on juba paigaldatud täheühendus… Faasirootori mähise tähtotsad juhitakse kolme libisemisrõnga külge, mis on paigaldatud rootori võllile ja on sellest elektriliselt isoleeritud.
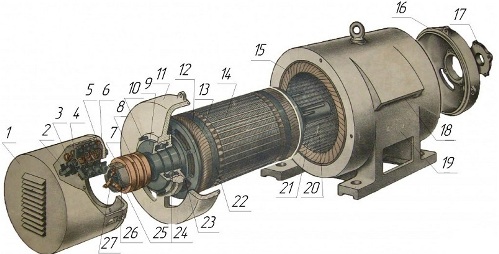
1 — võredega korpus, 2 — harjad, 3 — harjatõmme koos harjahoidjatega, 4 — harja kinnitustihvt, 5 — kaabliharjad, 6 — plokk, 7 — isolatsioonihülss, 8 — libisemisrõngad, 9 — välimine laagrikate, 10 — naast karbi ja laagrikatete kinnitamiseks, 11 — tagumine otsakilp, 12 — rootori mähis, 13 — poolihoidja, 14 — rootori südamik, 15 — rootori mähis, 16 — kilp esiotsas, 7 — välimine laagrikate, 18 — tuulutusavad, 19 — raam, 20 — staatori südamik, 21 — sisemised laagrikatte poldid, 22 — side, 23 — sisemine laagrikate, 21 — laager, 25 — võll, 26 — liugrõngad, 27 — rootori mähised
Läbi harjade antakse rõngastele kolmefaasiline vahelduvpinge ning ühendust saab teha nii otse kui ka reostaatide kaudu. Muidugi on rootormootoriga mootorid kallimad, aga nende omad Käivitusmoment koormuse all on oluliselt kõrgem kui oravpuuriga mootoritüüpidel. Suurenenud võimsuse ja suure käivitusmomendi tõttu on seda tüüpi mootor leidnud rakendust lifti- ja kraanaajamites, st kus seade käivitatakse koormuse all, mitte tühikäigul.
Lisateavet seda tüüpi mootorite kohta leiate siit: Keritud rootoriga asünkroonsed elektrimootorid
Vaata ka: Mille poolest erinevad asünkroonmootorid sünkroonmootoritest