Kontaktivabad andurid mehhanismide asukoha määramiseks
 Selles artiklis räägime mehhanismide asendianduritest. Põhimõtteliselt on iga anduri põhiülesanne konkreetse sündmuse toimumisel signaali andmine. See tähendab, et käivitussündmuse ilmnemisel aktiveerub andur ja genereerib signaali, mis võib olla analoog- või diskreetne, digitaalne.
Selles artiklis räägime mehhanismide asendianduritest. Põhimõtteliselt on iga anduri põhiülesanne konkreetse sündmuse toimumisel signaali andmine. See tähendab, et käivitussündmuse ilmnemisel aktiveerub andur ja genereerib signaali, mis võib olla analoog- või diskreetne, digitaalne.
Piirandureid on asendianduritena kasutatud aastakümneid. lülitid. Need koosnevad elektrikontaktidest, mis mehaaniliselt avanevad või sulguvad, kui mingi muutuja (asend) saavutab teatud väärtuse. Erinevat tüüpi lõpplülitid on paljude juhtimissüsteemide oluline osa, mille töökindlus sõltub neist. sellised andurid sisaldavad liikuvaid mehaanilisi elemente, mille ressursid on piiratud.
Lõpplüliteid asendatakse praegu aktiivselt erinevate lähedusanduritega. Enamasti järgmist tüüpi lähedusandurid: induktiiv-, generaator, magnetoherkon ja fotoelektrooniline. Nendel anduritel puudub mehaaniline kontakt liikuva objektiga, mille asukohta jälgitakse.
Kontaktivabad asendiandurid tagavad mehhanismi sisselülitamise suure kiiruse ja sageduse. Nende andurite teatav puudus on sõltuvus, nende täpsus toitepinge ja temperatuuri muutustest. Sõltuvalt nõuetest võib nende seadmete väljundseade olla järgmine kontaktivaba loogikaelementja elektriline relee.
Elektriajamite täppispidurdusskeemides saab lähedusandureid kasutada nii käigu allalülitamiseks kui ka lõppseiskamiseks.
Tänapäeval on turul mitut tüüpi andureid, kuid selle artikli raames tõstame teema esile otseselt induktiivsed asendiandurid, kuna enam kui 80% juhtudest on mehhanismide asukoha anduriteks induktiivsed andurid.
Induktiivne andur käivitub, kui metall läheneb oma päästikutsoonile. Sel põhjusel nimetatakse induktiivseid asendiandureid ka kohalolekuanduriteks, lähedusanduriteks või lihtsalt induktiivseteks lülititeks.
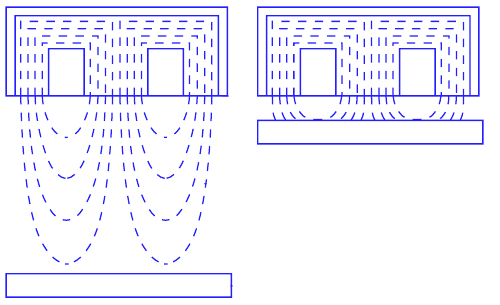
Vaatleme nüüd induktiivse anduri tööpõhimõtet. Nagu eespool mainitud, aktiveeritakse andur, kui metall on päästikutsoonile piisavalt lähedal. See nähtus seisneb asjaosaliste interaktsioonis induktiivpoolid kui sellele läheneb metall, mis muudab järsult mähise magnetvälja suurust, mis viib anduri aktiveerimiseni, see vallandub, selle väljundisse ilmub vastav signaal.
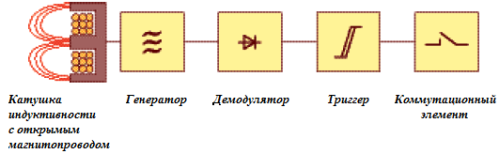
Seadme elektrooniline osa sisaldab juhtahelat, mis omakorda juhib relee või transistori lülitit. See koosneb järgmistest osadest:
-
Generaator, mis loob objektiga suhtlemiseks vajaliku elektromagnetvälja.
-
Schmitti päästik, mis tagab lülitushüstereesi.
-
Võimendi signaali amplituudi suurendamiseks nii, et see saavutaks vajaliku käivitusväärtuse.
-
LED indikaator, mis teavitab lüliti olekust. See pakub ka jõudluse jälgimist ja konfigureerimist.
-
Ühend, mis kaitseb tahkete osakeste ja vee sissetungimise eest.
-
Korpus anduri paigaldamiseks ja kaitse erinevate mehaaniliste mõjude eest.Valmistatud messingist või polüamiidist ning viimistletud kinnitusdetailidega.
Induktiivseid asendiandureid kasutatakse laialdaselt tööstusautomaatikasüsteemides, kus on vaja perioodiliselt või pidevalt määrata mehhanismi mis tahes osa asukohta. Andur genereerib signaali, mis saadetakse draivi. Käivitus, kontroller, relee, sagedusmuundur jne võivad toimida täitevmehhanismina. Peaasi, et anduri parameetrid vastaksid pinge ja voolu osas ajami parameetritele.
Enamik andureid ei ole toiteseadmed, need on eelkõige signaaliseadmed, seetõttu andur ise reeglina midagi võimsat ei lülita, vaid ainult juhib, annab juhtsignaali, toimib juba ühendatava tegevuse algatamise seadmena toite lülitamisele.
Kaasaegseid induktiivseid asendiandureid leidub kõige sagedamini kahes plast- või metallkorpuse versioonis: ristkülikukujulised või silindrilised. Ringikujulise ristlõikega anduri läbimõõt võib olla 4-30 mm, kuid enim kasutatavad läbimõõdud on 18 ja 12 mm.
Kui andur on seadmele paigaldatud, seatakse metallplaadi ja anduri käitamistsooni vahele vahe, tavaliselt ei ületa see vahemaa anduri läbimõõtu ja reeglina osutub see 2-3 korda väiksemaks kui selle läbimõõt.
Ühendusmeetodi järgi võivad induktiivsed asendiandurid olla kahe-, kolme-, nelja- ja viiejuhtmelised.
Kahejuhtmeline otse koormuse lülitus, nt käivituspool, see tähendab, et nad töötavad nagu tavaline lüliti. Kahejuhtmelised andurid nõuavad koormuskindlust, mistõttu need ei sobi alati usaldusväärse tööriistana, kuid ei kaota oma tähtsust.
Koormus on lihtsalt anduriga jadamisi ühendatud, kui kasutatakse konstantset pinget siis on oluline jälgida polaarsust, kui vahelduv polaarsus pole oluline, siis peamine on lülitatav võimsus ja vool.
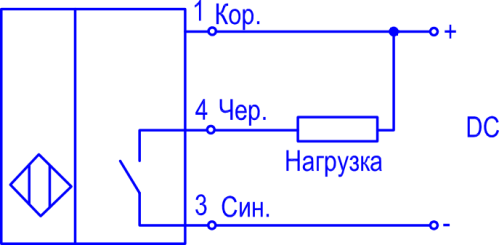
Kolmejuhtmelistel anduritel on anduri enda toiteks kolmas juhe ja see on kõige populaarsem lahendus. Nelja- ja viiejuhtmelistel anduritel on koormuse ühendamiseks transistor- või releeväljundid ning viies juhe võimaldab valida anduri töörežiimi, väljundite algoleku.
Kuna väljundid võivad olla nii relee kui ka transistor, jagatakse andurid vastavalt väljundite seadmele kolme tüüpi: relee, npn ja pnp.
Releeväljundiga andurid
Releeväljundiga anduril on toiteahela galvaaniline isolatsioon kaasasolevast vooluringist. See lülitab ühte juhet ja pinge lülitusahelas ei ole eriti kriitiline. Kuna anduri toiteahel on galvaaniliselt isoleeritud, võib seda pidada releeanduri eeliseks. Seda tüüpi andurid on tavaliselt suured.
Pnp transistori väljundiga andurid
Anduri väljundis on pnp transistor, mis kommuteerib positiivse juhtme koormusega. Väljund-pnp-transistori kollektorahelaga on ühendatud koormus, mis on oma teise juhtme kaudu püsivalt ühendatud negatiivsega.
Npn transistori väljundiga andurid
Anduri väljundis on NPN-transistor, mis kommuteerib negatiivse juhtme koormusega. Väljund-npn-transistori kollektorahelaga on ühendatud koormus, mis on oma teise juhtme kaudu püsivalt ühendatud positiivse juhtmega.
Vastavalt väljundite algseisundile võivad induktiivsed asendiandurid olla normaalselt suletud või normaalselt avatud kontaktidega. Algseisund tähendab, et see olek on hetkel, mil andur ei ole veel käivitatud, see tähendab, et see pole aktiveeritud.
Kui väljundkontaktid on normaalselt suletud, siis on koormus ühendatud tühikäigul, kui see on normaalselt avatud, siis kuni anduri käivitumiseni katkeb koormus ja ajamile (nt kontaktorile) ei anta toidet. Tavaliselt on suletud kontaktid tähistatud inglise keeles - N.C. (tavaliselt suletud), tavaliselt avatud – N.O. (Tavaliselt avatud).
Seega on transistorväljunditega andureid nelja tüüpi: kahte tüüpi vastavalt juhtivusele (pnp või npn) ja kahte tüüpi vastavalt väljundite algseisundile. Sisse- või väljalülitamisel võib esineda ka viivitust.

Sõltuvalt anduriga ühendatud ajami tüübist ja toiteallika meetodist võib anduri loogika olla positiivne või negatiivne. See on tingitud pingetasemest, mis aktiveerib seadme sisendi.
Kui sisend aktiveerub, kui täiturmehhanismi negatiivne juhe on ühendatud maandusega, miinusesse, siis nimetatakse loogikat negatiivseks, selline ühendus on omane npn tüüpi transistorväljunditega anduritele.
Positiivne loogika vastab ajami positiivse juhtme ühendamisele positiivse toiteallikaga, kui see on aktiveeritud, see loogika on tüüpiline pnp transistori väljunditega anduritele. Kõige sagedamini on mehhanismide asendi induktiivsete andurite töös positiivne loogika.
Vanemad enimkasutatavad induktiivsete asendiandurite tüübid
Induktiivsed asendiandurid IKV-22
Induktiivsed andurid IKV-22. Nende andurite töö põhineb terassüdamikuga poolide induktiivtakistuse muutmise põhimõttel, kui magnetahela õhupilu muutub.
Kahe mähisega magnetahel on paigaldatud terasplaadile, mis on suletud plastkaanega. Altpoolt on plaadile kinnitatud kaks MBGP kondensaatorit (üks võimsusega 15 μF, 200 V, teine võimsusega 10 μF, 400 V). Kondensaatorid on kaetud kaanega. Kaabel on ühendatud läbi tihendi. Mehhanismile paigaldatakse magnetshunt, mille mõõtmed peavad olema vähemalt: paksus 2 mm, laius 80 mm, pikkus 140 mm. Õhuvahe magnetahela ja šundi vahel on 6 ± 4 mm.
Väljundrelee lülitub tavaliselt sisse ja välja hetkel, mil magnetiline šunt läbib andurit, kui mähise induktiivtakistuse muutumise tõttu tekib vooluresonants ja relee mähise läbiv vool langeb. Need releed: tüüp MKU-48, 12 V AC, voolutugevus mitte üle 0,45 A, langusvool mitte vähem kui 0,1 A.Anduriahela toitepingeks on 24 V AC relee.
Induktiivsed asendiandurid ID-5
Metallurgiatöökodades kasutatakse ID-5 tüüpi induktiivseid andureid, mis on ette nähtud töötamiseks ümbritseva õhu temperatuuril kuni + 80 ° C ja niiskusel kuni 100%. Elektrit juhtiv tolm ja katlakivi on vastuvõetavad. Anduriga kasutatakse UID-10 tüüpi pooljuhtväljundvõimendit. Võimendi väljundvõimsus (25 W) on piisav, et sisse lülitada laialt levinud REV-800 releed, kontaktorid KP21, MK-1 jne.
Anduri ja vaadeldava ferromagnetilise objekti vaheline õhuvahe võib olla kuni 30 mm. ID-5 anduri mõõdud on 187x170x70 mm, toitepinge 220 V ± 15%, 50 Hz.
Väikesed BSP kontaktivabad lülitid
Metalli lõikepinkides kasutatakse väikeseid liikumislüliteid BSP-2 (kontaktivaba väljundiga, loogikaelemendile) ja BRP (väljundiga releele PE-21, 24 V, 16 Ohm).
BSP-2 lüliti koosneb diferentsiaaltrafo andurist ja pooljuhtpäästikust. Esimese andurimähise magnetsüsteemi liigutab terasplaat ja teist mähist manipuleeritakse, kui see liigub üle oma magnetsüsteemi, mis on ühendatud lameda armatuuri mehhanismiga. Poolid lülitatakse sisse vastupidises suunas.
Kui armatuur on anduri kohal, on mähiste induktiivreaktantsid võrdsed ja diferentsiaaltrafo anduri väljund on null. Sel juhul ilmub päästiku väljundisse pinge vähemalt 2,5 V, millest piisab loogikaelemendi töötamiseks.
Anduri kohal oleva armatuuri puudumisel rakendatakse päästikule pinget, mis tagastab selle algsesse olekusse. Siis on lüliti väljundsignaal null.
BRP-lüliti tööpõhimõte on paljuski sarnane BSP-2 omaga.Karbi sisse on paigaldatud induktiivne andur (vastavalt diferentsiaaltrafo ahelale), päästik ja võimendi. Erineva pöörete arvuga sekundaarpoolid lülitatakse sisse vastupidises suunas. Kuna armatuur kattub anduri magnetsüsteemiga, siis signaal väheneb ja peale faasi muutmist lülitatakse päästik sisse ning aktiveerub väline väljundrelee (PE-21, 24 V, 16 Ohm).
Mehhanismi külge kinnitatud ankru mõõtmed on 80x15x3 mm. Ankru ja anduri vahe on 4 mm. Lülitite täpsus nominaalrežiimis on ± 0,5 mm, käitamise diferentsiaal ei ületa 5 mm. Kell. toitepinge ja temperatuuri kõikumiste korral võib BSP-2 ja BRP lülitite viga ulatuda ± (2,5-f-3,0) mm-ni.
Kõrgsageduslikud induktiivsed andurid VKB
Metallilõikepinkide automatiseerimiseks kasutatakse ka U-kujulise või lameda armatuuriga VKB-tüüpi ülitäpseid induktiivseid andureid. Sisseehitatud trafo poolused moodustavad avatud elektromagnetilise süsteemi. Töötav õhuvahe on 0,1-0,15 mm.
Trafo sekundaarmähise väljundpinge juhitakse diferentsiaalmõõteahelasse ja seejärel transistorvõimendisse. Anduri koguviga temperatuurikõikumistega 5–40 ° C ja pingega 85–110% nimiväärtusest on ± (0,064–0,15) mm, vastuse erinevus ei ületa 0,4 mm. Mehhanismi maksimaalne liikumiskiirus on 10 m / mm. Anduri mõõdud 62x34x24 mm. Toitepinge 12 V.
Eritüüpi diferentsiaalahelaga metallilõikamismasinate täppis-induktiivandurite viga on väiksem kui ± 0,01 mm.Sellised andurid hõlmavad VPB12 tüüpi kontaktivaba liikumislülitit, mis koosneb elektroonilisel seadmel olevast anduriüksusest. Anduriplokk sisaldab induktiivset tööandurit, induktiivset kompensatsiooniandurit ja trükkplaate. Mehhanism on paigaldatud: juhtferriitelement. Toitepinge 12 V DC. Maksimaalne särituse kaugus ei ületa 0,12 mm. Anduri väljundiga saab ühendada RPU-0 tüüpi relee. Väljundseadme maksimaalne koormusvool on 0,16 A.
Generaatori asendiandurid
Seda tüüpi andurid on kompaktsed ja väga täpsed. Seeria KVD-6M ja KVD-25 (pesadega), KVP-8 ja KVP-16 (lennukid) andurigeneraatorid on end hästi tõestanud. Need sobivad kasutamiseks kõrge niiskuse ja tolmu kontsentratsiooniga. Anduri transistori ahela elemendid (generaator ja päästik) asuvad põrutuskindlast polüstüreenist korpuses. Tihendamine toimub külmkõvastuva seguga. Töötemperatuuri vahemik on -30 kuni +50 °C.
HPC andur genereerib diskreetse signaali, kui metallplaat ("lipp") läbib pesa, põhjustades rikke päästiku genereerimisel ja ümberlülitamisel. Pesa laius on KVD-6M anduril 6 mm ja anduril KVD-25 25 mm.
Andurid KVP-8 ja KVP-16 aktiveeruvad, kui metallplaat möödub neist maksimaalselt vastavalt 8 ja 16 mm kaugusel.