Juht- ja toiteahelad elektromagnetite tõstmiseks
 Tõsteelektromagnetitel on kõrge induktiivsus, seetõttu kasutatakse koormuse kiireks ja täielikuks tühjendamiseks, samuti ülepinge piiramiseks kuni 2 kV väärtuseni spetsiaalseid vooluahelaid ja juhtimisseadmeid. Elektromagnetid saavad pinget mootorgeneraatorist või alaldist. Skemaatilised juhtimisskeemid, kui elektromagnetid saavad toite alalisvooluvõrgust, on näidatud joonisel fig. 1, a ja b.
Tõsteelektromagnetitel on kõrge induktiivsus, seetõttu kasutatakse koormuse kiireks ja täielikuks tühjendamiseks, samuti ülepinge piiramiseks kuni 2 kV väärtuseni spetsiaalseid vooluahelaid ja juhtimisseadmeid. Elektromagnetid saavad pinget mootorgeneraatorist või alaldist. Skemaatilised juhtimisskeemid, kui elektromagnetid saavad toite alalisvooluvõrgust, on näidatud joonisel fig. 1, a ja b.
Kontroll tõstev elektromagnet vastavalt näidatud skeemile viiakse läbi järgmisel viisil. Kui kontroller K on sisse lülitatud, rakendatakse pinget magnetiseerivale kontaktorile B, mille sulgemiskontaktid ühendavad elektromagneti võrku. Sel juhul liigub nimivool läbi elektromagneti mähise M ja paralleelselt ühendatud tühjendustakistus (P1 — P4, P4 — PZ ja PZ — P2) liigub ringi väiksema väärtusega vooluga. Kontaktori mähis H, mis on ühendatud punktide 6 ja 7 vahele, ei juhi, kuna on jadamisi ühendatud avatud abikontakt B, mis on avatud, kui kontaktor B on sisse lülitatud.
Kui kontroller K.on välja lülitatud, avanevad kontaktori B sulgemiskontaktid, elektromagnet lülitatakse korraks pingest välja ja lülitub automaatselt vastupidisele polaarsusele ning pärast koormuse langemist ühendatakse elektromagnet lõpuks toiteallikast lahti. See elektromagneti kaasamine tagab koormuse demagnetiseerimise, mis aitab kaasa selle kiirele langemisele.
Automaatne toimimine elektromagneti väljalülitamisel tagab peamiselt demagnetiseeriva kontaktori H töö. Kontaktori H mähise klemmide pinge määrab pingelangus takistuse sektsioonides 6 — P4 ja P4—7 . Kui elektromagnet on välja lülitatud, ei kao selle vool kohe, vaid suletakse tühjendustakistuste ahelaga. Sektsioonide 6 — P4 ja P4—7 takistused valitakse nii, et pärast kontrolleri K väljalülitamist ja avakontakti B sulgemist lülitub sisse kontaktor H.
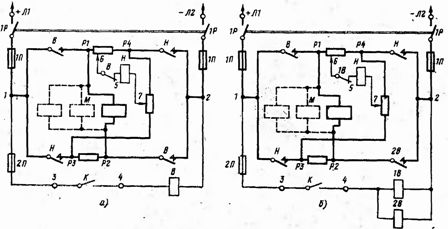
Riis. 1. Elektromagnetite tõstmiseks mõeldud magnetkontrollerite PMS 50 (a) ja PMS 150 (b) skemaatilised juhtimisskeemid: V või 1 V, 2 V-bipolaarne magnetiseeriv kontaktor või kaks unipolaarset; H — kahepooluseline demagnetiseeriv kontaktor; 1P — lüliti; 1P, 2P — toiteahela ja juhtahela kaitsmed; K — käsukontroller; M — elektromagnet; P1-P4, P4-P3 ja P3-P2-lahendustakistid.
Pärast kontaktori H sisselülitamist suletakse selle toitekontaktid ja elektromagnet ühendatakse võrku. Sel juhul muutub voolu suund elektromagneti mähises ja mähisega järjestikku ühendatud takistuses 6-P4 aja jooksul vastupidiseks. Voolu suuna muutus takistuse lõigus 6 — P4 toimub eelmise vastupidise suuna voolu eelneval vähendamisel nullini.Nullvoolu korral sektsioonis 6 — P4 jääb kontaktor H sisse, sest selleks piisab pingelangust sektsioonis P4—7 (sektsioonis 6 — P4 on pingelang null).
Kui voolu suund muutub sektsioonis 6 — P4, lülitatakse kontaktor H välja, kuna selle mähis osutub ühendatud pingelanguse erinevusega sektsioonides 6 — P4 ja P4 — 7. Kontaktori H katkestus tekib siis, kui demagnetiseerimisvool saavutab väärtuse, mis on võrdne 10-20% elektromagneti külma pooli töövoolust, st praktiliselt pärast demagnetiseerimist ja koormuse kadumist.
Pärast väljalülitamist lahutab kontaktor H solenoidi mähise võrgust, mis jääb tühjendustakistuse suhtes suletuks. See hõlbustab kaare murdmist kontaktorilt ja vähendab ülepinget, pikendades pooli isolatsiooni eluiga. Kontaktori B avanev abikontakt (kontaktori H pooliahelas) takistab mõlema kontaktori samaaegset töötamist.
Ahel võimaldab reguleerida demagnetiseerimisaega, mida saab teha takisti klambrite liigutamisega, st muutes sektsioonide 6 - P4 ja P4-7 takistuse väärtusi. Samal ajal reguleeritakse seda aega automaatselt sõltuvalt tõstetava koorma tüübist. Koormuse suurema massi korral on selle magnetjuhtivus suurem, mis toob kaasa elektromagneti ajakonstandi pikenemise ja seega ka demagnetiseerimisaja pikenemise. Koormuse kerge kaalu korral väheneb demagnetiseerimisaeg.
Kirjeldatud skeemi järgi toodetakse PMS 50, PMS 150, PMS50T ja PMS 150T tüüpi magnetkontrollereid.
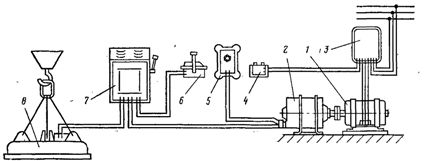
Riis. 2.Kraana tõsteelektromagneti elektriahel vahelduvvooluvõrgu olemasolul: 1 — asünkroonne elektrimootor; 2 — piisav voolugeneraator; 3 — magnetkäiviti; 4 — juhtnupp; 5 — ergutusregulaator; 6 — käsukontroller; 7 — magnetkontroller; 8 — tõsteelektromagnet.
Enamik tõstesolenoididega kraanasid töötavad vahelduvvooluvõrgust, seega tuleb alalisvoolu solenoidide jaoks kasutada mootorigeneraatorit või alaldit. Joonisel fig. 2 kujutab tõsteelektromagneti toiteahelat mootori generaatorist. Generaatori kaitse lühisvoolude eest. REV 84 tüüpi pingerelee juhitakse elektromagneti toitekaablisse.
Pöördmuundurite asendamine staatiliste muunduritega vähendab kapitalikulusid, elektrikaalu ja tegevuskulusid. PSM 80 tüüpi magnetkontroller koos KP 1818 selsyn juhtkontrolleriga võimaldab koormustaluvust reguleerida. Sellel on suur tähtsus lehtmetalli viimistlemise, sorteerimise, märgistamise ja transportimisega seotud töödel metallurgiatehastes, aga ka erinevates ladudes ja alustes.
Joonisel fig. 3 on staatiliselt juhitava muunduriga magnetkontrolleri PSM 80 diagramm. Konverter on valmistatud trafodeta kolmefaasilise täislaineahela järgi, millel on üks türistori ja tühjendusdiood. Voolu reguleerimine toimub muunduri väljundpinge muutmisega türistori avanemisnurga muutmisega. Türistori avanemisnurk sõltub tugisignaalist, mis on sünkroonse juhtkontrolleri abil laias vahemikus astmeliselt reguleeritav.
Toite I kasutab kolme mähisega trafot.Releeelementide toiteks kasutatakse 36 V mähist, 115 V mähiselt eemaldatakse kontrolleri selsin-ergutuspinge Toiteallikas on ühefaasiline alaldi D7-D10, mille väljundis zeneri dioodid St1-St3 ja on paigaldatud liiteseadis takisti R2.
Releeelemendi stabiliseeritud toitepinge 16,4 V eemaldatakse zeneri dioodide St2 ja St3 abil. Sel juhul läbib takisti R3 ja transistori T1 alust pärivool, mis lülitab transistori sisse. Zeneri dioodilt St1 rakendatakse transistori T2 alusele negatiivne nihe (-5,6 V), et see välja lülitada, kui transistor T1 on avatud.
Plokiülesanne II koosneb Selsinasisaldub selsyny kontrolleris ja ühefaasilises alaldis D11-D14. Selsyn rootori liinipinge rakendatakse silla sisendile, mis muutub staatori suhtes pöörlemisel. Rootorit pöörab käepide CCK Silla väljundis saadakse muutuv alaldatud pinge, millega proportsionaalselt muutub ka väljundvool, mis kulgeb transistori T1 lahtiolekul läbi selle aluse ja takisti R6. Releeelement on kokku pandud kahele p-p-p tüüpi transistorile.
Faasijuhtimise režiimi tagamiseks ahelas on ette nähtud saehambaga pingeallikas, milleks on RC-ahel, mida šunteerib türistor T. Kui türistor on suletud, laetakse kondensaatoreid C4 C5. Kui türistor T avaneb, toimub kondensaatorite kiire tühjenemine. Saevool voolab läbi takisti R13 ja transistori T1 aluse.
Selsinki kontrolleril on üks fikseeritud asend (null) ja see tagab pidurdusseisundi juhtkäepideme mis tahes vahepealses asendis.Sel juhul vastab rootori selsyn igale asendile elektromagnetilise voolu teatud väärtus. Juhtasendites säilitab ahel piisava täpsusega elektromagneti voolu keskmist väärtust, kui selle mähis on kuumutatud. Külma ja kuuma mähise voolu tolerants ei ületa 10% ja kuumutatud mähise voolu maksimaalne väärtus ei ületa voolu kataloogiväärtust rohkem kui 5 võrra. Kui toitepinge kõigub vahemikus (0,85 — 1,05) UH, elektromagneti voolu muutus ei ületa etteantud piire.
DC-poolne lülitusahel sisaldab:
• kahepooluselised kontaktorid otseseks KB ja vastupidiseks CV elektromagneti lülitamiseks;
• kaks ajareleed РВ ja РП elektromagneti demagnetiseerimisprotsessi juhtimiseks seiskamise ajal,
• tühjendustakistid R19 — R22 elektromagneti väljalülitamisel tekkiva liigpinge piiramiseks;
• diood D4 tühjendustakistite võimsuse vähendamiseks.
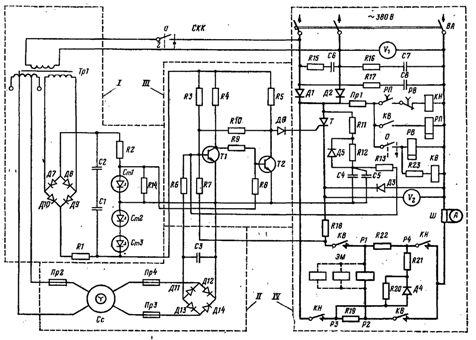
Riis. 3. Elektromagneti kandevõime reguleerimise skeem: I - toiteplokk: II - tegumiplokk; III — releeelement; VI — toiteahel; R1 — R25 — takistid; C1 — C8 — kondensaatorid, W — šunt; VA — automaatlüliti; D1 -D16 — dioodid; KV ja KN — elektromagneti otse- ja pöördmähisega kontaktorid (magnetiseerimine ja demagnetiseerimine); РВ ja РП — ajarelee demagnetiseerimisprotsessi juhtimiseks, Pr1 — Pr4 — kaitsmed; Сс — kontroller selsyn; St1 -St3 — zeneri dioodid; T — türistor: T1, T2 — transistorid, TP1 — trafo; EM — tõstev elektromagnet; SKK – selsyn kontroller.
Kui elektromagneti toitekaabel puruneb, tuleb magnetkontrolleri lüliti või kaitselüliti välja lülitada. Töötava elektromagnetiga segisti all viibimine on rangelt keelatud. Seadmete ülevaatus ja vahetamine peab toimuma välja lülitatud segisti pealülitiga.
Kõik elektriseadmed peavad olema kindlalt maandatud. Pöörake erilist tähelepanu elektromagneti maandusele. Solenoidkarbis olev maanduspolt on ühendatud magnetkontrolleri korpuse maanduspoldiga. Ühendus tehakse ühest kolmesoonelise toitekaabli südamikust. Vastasel juhul tuleks elektriseadmete kasutamisel juhinduda elektripaigaldiste hooldamise üldistest ohutusreeglitest.