Asünkroonmootorite ehituslikud vormid
 Välised struktuurivormid asünkroonsed mootorid määravad mootori paigaldusviis ja selle kaitse vorm keskkonnamõjude eest. Tavaline jalgade motoorne jõudlus on laialt levinud (joonis 1, a). Sel juhul peab mootori võll olema horisontaalne. Äärikutega mootoreid (joonis 1, b) kasutatakse laialdaselt horisontaalsete ja vertikaalsete paigalduste jaoks.
Välised struktuurivormid asünkroonsed mootorid määravad mootori paigaldusviis ja selle kaitse vorm keskkonnamõjude eest. Tavaline jalgade motoorne jõudlus on laialt levinud (joonis 1, a). Sel juhul peab mootori võll olema horisontaalne. Äärikutega mootoreid (joonis 1, b) kasutatakse laialdaselt horisontaalsete ja vertikaalsete paigalduste jaoks.
Nad toodavad ka inline induktsioonmootoreid, millel pole raami, otsakilpe ega võlli. Sellise mootori elemendid on sisseehitatud masina kere osadesse ja mootori võll on üks masina võllidest (sageli spindel) ja alus on masinakoostu korpus, näiteks lihvimispea (joon. . 2).
Välismaal levitatakse laialdaselt erikonstruktsiooniga mootoreid, sealhulgas väikeste radiaalsete mõõtmetega ja märkimisväärse pikkusega mootoreid ning ketasmootoreid, eriti silindrikujulise staatori ja rõngakujulise välisrootoriga. Kasutatakse ka mootoreid, mille sisselülitamisel liigub koonuse kujuga rootor aksiaalsuunas, arendades märkimisväärset tõukejõudu.
Seda jõudu kasutatakse mootori võllile mõjuva mehaanilise piduri vabastamiseks pärast mootori vooluvõrgust lahtiühendamist. Lisaks kasutatakse arvukalt mootorikonstruktsioone koos kinnitatud käigukastide, käigukastide ja mehaaniliste variaatoritega, mis tagavad sujuva reguleerimise.
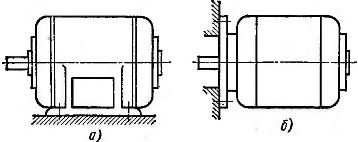
Riis. 1. Asünkroonsete mootorite projekteerimine
Spetsiaalse disainiga mootorite kasutamise puuduseks on nende asendamise raskus õnnetuse korral. Vigast elektrimootorit ei tohiks välja vahetada, vaid parandada ja masin töötab remondi ajal tühikäigul.
Masinate juhtimiseks kasutatakse erineva keskkonnakaitsega mootoreid.
Varjestatud mootoritel on võred, mis katavad otsakilpide ventilatsiooniavad. See hoiab ära võõrkehade sattumise mootorisse ning samuti ei lase töötaja puudutada pöörlevaid ja pinge all olevaid osi. Et vältida vedelikupiiskade ülalt kukkumist, on mootorid varustatud allapoole suunatud või vertikaalsete õhutusavadega.
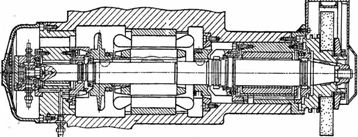
Riis. 2. Sisseehitatud lihvimismootor
Kui aga selline elektrimootor töötab töökojas, imeb selle ventilaator koos õhuga endasse tolmu, pritsib jahutusvedelikku või õli, aga ka väikseid terase või malmi osakesi, mis mähise isolatsiooni külge kleepudes vibreerivad. vahelduva magnetvälja mõjul kulub isolatsioon kiiresti ära.
Kinnistel mootoritel, mille otsaekraanidel ei ole ventilatsiooniavasid, on keskkonnamõjude eest usaldusväärsem kaitse. Sellised kaitstud mootoritega samade mõõtmetega mootorid on kehvema jahutuse tõttu väiksema võimsusega.Sama võimsuse ja kiirusega on suletud elektrimootor 1,5-2 korda raskem kui kaitstud ja vastavalt sellele on selle hind kõrgem.
Soov vähendada suletud mootorite suurust ja maksumust viis suletud puhutud elektrimootorite loomiseni. Sellisel elektrimootoril on väline ventilaator, mis on paigaldatud mootori võlli ajami otsa vastas olevale otsale ja kaetud korgiga. See ventilaator puhub ümber mootori korpuse.
Ventilaatorimootorid on oluliselt kergemad ja odavamad kui kinnised. Puhutud mootoreid kasutatakse kõige sagedamini metalli lõikamismasinate juhtimiseks. Muude keskkonnakaitsevormidega mootoreid kasutatakse metallilõikuspinkide käitamiseks suhteliselt harva. Eelkõige kasutatakse lihvmasinate käitamiseks mõnikord suletud elektrimootoreid.
Elektrimootorid on ette nähtud standardsetele pingetele 127, 220 ja 380 V. Sama mootorit saab ühendada erineva pingega võrkudesse, näiteks võrkudesse pingega 127 ja 220 V, 220 ja 380 V. Kahe pingega, Elektrimootori staatori mähis on ühendatud kolmnurgaga, suurema jaoks - tähega. Elektrimootori mähistes olev vool ja nendes olev pinge on selle kaasamisega mõlemal juhul samad. Lisaks toodavad nad 500 V elektrimootoreid, nende staatorid on püsivalt ühendatud tähega.
Paljudes tööstusharudes kasutatavaid asünkroonseid oravpuuriga mootoreid toodetakse nimivõimsusega 0,6-100 kW per kohta. sünkroonsed kiirused 600, 750, 1000, 1500 ja 3000 p/min.
Elektrimootori mähise juhtmete ristlõige sõltub seda läbiva voolu suurusest. Suurema voolu korral on mootori mähisel suurem maht.Magnetahela ristlõige on võrdeline magnetvoo suurusega. Sel viisil määratakse elektrimootori mõõtmed voolu ja magnetvoo arvutatud väärtuste või elektrimootori nimipöördemomendi järgi. Mootori nimivõimsus

kus P.n — nimivõimsus, kW, Mn- nimimoment, N • m, nn- nimikiirus, p/min.
Sama mootori nimivõimsus suureneb selle nimipöörlemissageduse kasvades. Seetõttu on väikese kiirusega elektrimootorid suuremad kui sama võimsusega kiired mootorid.
Väikeste aukude lihvimisel on piisava lõikekiiruse saavutamiseks vaja väga suurt lihvimisspindli kiirust. Niisiis, 3 mm läbimõõduga rattaga lihvimisel kiirusega vaid 30 m / s peaks spindli kiirus olema 200 000 pööret minutis. Spindli suurtel pööretel saab kinnitusjõudu järsult vähendada. Samal ajal väheneb rataste lihvimine ja südamiku painutamine ning suureneb pinnaviimistlus ja töötlemise täpsus.
Seoses eelnevaga on tööstuses kasutusel arvukalt mudeleid nn. Elektrilised spindlid pöörlemiskiirustega 12 000-144 000 p/min ja rohkem. Elektrospindel (joonis 3, a) on veerelaagritel olev lihvimisvõll, millel on sisseehitatud kõrgsageduslik oravpuurimootor. Mootori rootor asub kahe laagri vahel lihvketta vastas olevas spindli otsas.
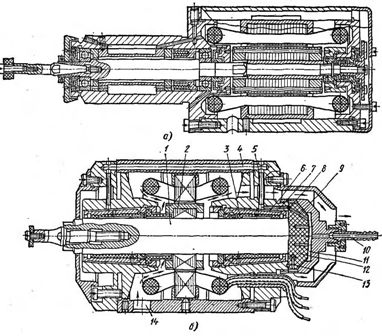
Riis. 3. Elektrospindlid
Elektrilise spindli staator on kokku pandud lehtterasest. Sellele asetatakse bipolaarne mähis.Mootori rootor kiirustel kuni 30 000-50 000 p/min valitakse samuti lehtmetallist ja tarnitakse tavapärase lühismähisega. Nad kipuvad vähendama rootori läbimõõtu nii palju kui võimalik.
Laagri tüübi valik on elektrispindlite töö jaoks eriti oluline. Tavaliselt kasutatakse täppis-kuullaagreid, mis töötavad kalibreeritud vedrude abil loodud eelkoormusega. Selliseid laagreid kasutatakse pöörlemiskiirustel, mis ei ületa 100 000 pööret minutis.
Tööstuses kasutatakse laialdaselt aerostaatilisi laagreid (joonis 3, b). Kõrgsagedusliku elektrimootori võll 1 pöörleb õhkmäärdega laagrites 3. Teljekoormust neelab võlli otsa ja tugilaagri 12 vahel olev õhkpadi, mille vastu surutakse võll mootori jahutamiseks mõeldud ava 14 kaudu korpuse sisemusse juhitava õhu rõhu all. suruõhk läbib filtrit ja siseneb läbi liitmiku 10 kambris 11. Siit läbi kanali 9 ja ümmarguse soone 8 suundub õhk kanalisse 7 ja kambrisse 6. Sealt läheb õhk laagrisse. lõhe. Õhk juhitakse vasakusse laagrisse läbi torude 5 ja kanalite 4 mootori korpuses.
Väljatõmbeõhk juhitakse välja kanalite 13 kaudu. Õhkpadi tugilaagripilus tekib õhul, mis liigub kambrist 11 läbi poorsest süsinikgrafiidist valmistatud laagri. Igal laagril on kitsenev messing. Sellesse on pressitud süsinikgrafiidist vooder, mille poorid on täidetud pronksiga. Enne elektrispindli käivitamist antakse õhku ning spindli ja pukside vahele moodustatakse õhkpadjad. See välistab käivitamise ajal laagrite hõõrdumise ja kulumise.Pärast seda lülitatakse mootor sisse, rootori 2 kiirus saavutab nimikiiruse 5-10 sekundiga. Kui mootor on välja lülitatud, pöörleb rootor 2 3–4 minutit. Selle aja vähendamiseks kasutatakse elektrilist pidurit.
Turvapatjade kasutamine vähendab drastiliselt hõõrdekadusid elektrispindlis, õhukulu on 6-25 m3/h.
Kasutatud on ka vedelmäärdega laagritel olevaid elektrospindleid. Nende töö nõuab õli pidevat tsirkulatsiooni kõrge rõhu all, vastasel juhul muutub laagrite kuumutamine vastuvõetamatuks.
Kõrgsageduslike elektrimootorite tootmine eeldab üksikute detailide täpset valmistamist, rootori dünaamilist tasakaalustamist, täpset montaaži ning staatori ja rootori vahe range ühtsuse tagamist. Kõrgsageduslikku elektrimootorit varustava voolu sagedus valitakse sõltuvalt elektrimootori nõutavast kiirusest:

kus nKui elektrimootori sünkroonne pöörlemissagedus, p/min, f on voolu sagedus, Hz, p on pooluste arv, kuna p = 1, siis

Elektriliste spindlite sünkroonse pöörlemiskiiruse korral 12 000 ja 120 000 pööret minutis peaks voolusagedus olema vastavalt 200 ja 2000 Hz.
Kõrgsageduslike mootorite toiteks kasutatakse spetsiaalseid generaatoreid. Joonisel fig. 4 on kujutatud kolmefaasiline sünkroonne induktsioongeneraator. Generaatori staatoril on laiad ja kitsad pilud. Väljamähis, mis asub staatori laiades piludes, on varustatud alalisvooluga. Selle mähise juhtmete magnetväli on suletud läbi staatori hammaste ja rootori eendite, nagu on näidatud joonisel fig. 4 punktiirjoonega.
Rootori pöörlemisel läbib piki rootori eendeid liikuv magnetväli staatori kitsastes piludes paikneva vahelduvvoolu mähise pöördeid ja indutseerib vahelduva e. jne. c) selle sagedus e. jne. v. sõltub rootori kõrvade kiirusest ja arvust. Sama voo poolt indutseeritud elektromotoorjõud väljahaava mähistes tühistavad üksteist poolide eelseisva aktiveerumise tõttu. Väljapoolid saavad toite vooluvõrku ühendatud alaldist. Staatoril ja rootoril on elektrotehnilisest teraslehest valmistatud magnetsüdamikud.
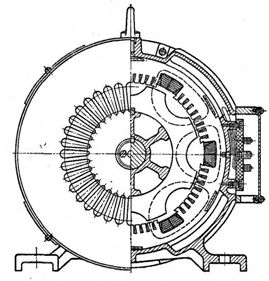
Riis. 4. Kõrgsageduslik induktsioongeneraator
Kirjeldatud konstruktsiooniga generaatoreid toodetakse nimivõimsusele 1–3 kW ja sagedustele 300–2400 Hz. Generaatoreid käitavad asünkroonsed mootorid sünkroonse kiirusega 3000 p/min.
Suurenenud sagedusega induktsioongeneraatoreid hakatakse asendama pooljuht- (türistor-) muunduritega. Sel juhul annavad need tavaliselt võimaluse muuta voolu sagedust ja seega ka võimaluse reguleerida elektrimootori pöörlemiskiirust. Kui sellise reguleerimise ajal hoitakse pinge konstantsena, siis teostatakse konstantset võimsuse reguleerimist. Kui pinge ja voolu sageduse suhet (ja seega ka mootori magnetvoogu) hoitakse konstantsena, viiakse reguleerimine läbi konstantselt kõigil kiirustel pika aja jooksul lubatud pöördemomendiga.
Türistori sagedusmuunduriga ja asünkroonse oravpuuriga mootoriga ajamite eelisteks on kõrge kasutegur ja kasutusmugavus. Negatiivne külg on endiselt kõrge hind.Masinaehituses on kõige soovitatavam kasutada sellist ajamit kõrgsageduslike mootorite jaoks. Seda tüüpi katseajamid on meie riigis loodud.
Madala võimsusega kahefaasilisi asünkroonmootoreid kasutatakse sageli tööpinkide ajamites. Sellise mootori staatoril on kaks mähist: välimähis 1 ja juhtmähis 2 (joonis 5, a). Oravapuuris oleval rootoril 4 on suur aktiivne takistus. Rullide teljed on üksteisega risti.
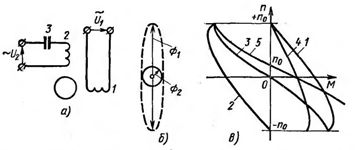
Riis. 5. Kahefaasilise asünkroonmootori skeem ja selle omadused
Mähistele rakendatakse pinged Ul ja U2. Kui kondensaator 3 on ühendatud mähise 2 ahelaga, ületab selles olev vool mähises 1 oleva voolu. Sel juhul tekib pöörlev elliptiline magnetväli ja orava rootor 4 hakkab pöörlema. Kui vähendate pinget U2, väheneb ka vool mähises 2. See toob kaasa pöörleva magnetvälja ellipsi kuju muutumise, mis muutub üha pikemaks (joonis 5, b).
Elliptilise välja mootoriks võib pidada kahte ühel võllil asuvat mootorit, millest üks töötab pulseeriva väljaga F1 ja teine ringikujulise väljaga F2. Pulseeriva väljaga mootorit F1 võib pidada kaheks identseks ümmarguse väljaga asünkroonmootoriks, mis on ühendatud pöörlema vastassuundades.
Joonisel fig. 5, c on kujutatud ümmarguse pöörleva väljaga asünkroonmootori mehaanilised omadused 1 ja 2 ning rootori märkimisväärne aktiivtakistus erinevates suundades pöörlemisel. Ühefaasilise mootori mehaanilise karakteristiku 3 saab konstrueerida, lahutades karakteristikute 1 ja 2 momendid M iga n väärtuse kohta.Mis tahes väärtuse n korral peatatakse suure rootori takistusega ühefaasilise mootori pöördemoment. Ringvälja mootori mehaanilist karakteristikku kujutab kõver 4.
Kahefaasilise mootori mehaanilise karakteristiku 5 saab konstrueerida, lahutades karakteristikute 3 ja 4 momendid M mis tahes väärtuse n juures. Väärtus n0 on kahefaasilise asünkroonmootori pöörlemiskiirus ideaalsel tühikäigul. Reguleerides pooli 2 toitevoolu (joonis 5, a), on võimalik muuta karakteristiku 4 kallet (joonis 5, c) ja seega ka n0 väärtust. Sel viisil viiakse läbi kahefaasilise asünkroonmootori kiiruse reguleerimine.
Suure libisemisväärtusega töötamisel muutuvad rootori kaod üsna märkimisväärseks. Sel põhjusel kasutatakse kõnealust regulatsiooni ainult väikese võimsusega lisaajamite puhul. Kiirendus- ja aeglustusaja vähendamiseks kasutatakse kahefaasilisi õõnsa rootoriga asünkroonmootoreid. Sellises mootoris on rootor õhukese seinaga alumiiniumist õõnessilinder.