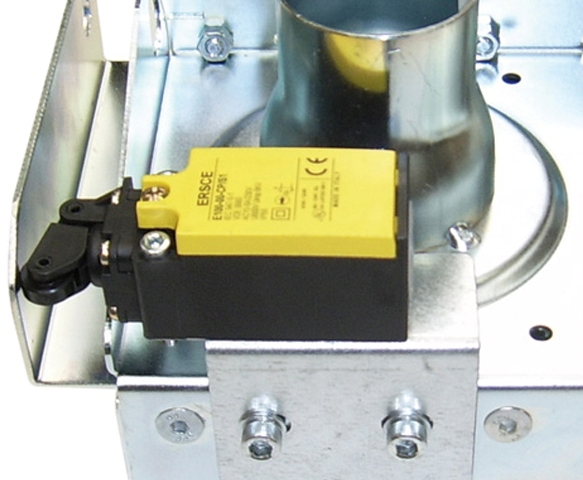
Kontakt- ja mittekontaktsete reisilülitite võrdlus
Tööstusautomaatikas kasutatakse laialdaselt vooluahelaid sõidu (asendi) lülitid ja lülitid mitu konstruktsiooni, mis on loodud erinevate tootmismehhanismide positsioonide juhtimiseks ja põhinevad nende mehhanismide liikumise ümberkujundamisel elektrilises signaalis.
Asendilülitid saab kasutada ka muude funktsioonide täitmiseks peale tootmismehhanismide asendikontrolli, näiteks pöördenurga, taseme, kaalusurve jms juhtimine.

Suunalülitid on diskreetse toimega seadmed, mis töötavad suurendamise põhimõttel, st reageerivad ainult juhitava mehhanismi asendi muutumisele. Lülitite väljundsignaal on mehhanismi liikumise mitmetähenduslik funktsioon antud lähteasendist.
Teepöörmete tüübid
Sõltuvalt asendivahetuse põhimõtetest jaguneb lülitusmeetod järgmisteks osadeks:
-
lülituskontaktide ja kontaktitundlike elementidega tehtud mehaaniline kontakt;
-
staatiline kontakt (magnetmehaaniline), mille tundlik element on mittekontaktne ja lülituselement on kontakt;
-
staatilised kontaktivabad, tundlikud ja lülituselemendid, millest valmistatakse kontaktivaba.
Sõlme "lülitus-seiskamine" kontakti olemuses, st juhtelemendi (sisendjuhtsignaali) ühenduses tundliku elemendiga, nimetatakse seda sõlme mehaaniliseks ja mittekontaktis - staatiliseks. .
Sõltuvalt disainist saab lüliteid kombineerida või eraldada. Esimesel juhul asetatakse tundlikud ja lülituselemendid ühte korpusesse ja teostatakse struktuurselt tervikuna. Teises võib tundlik element asuda lülitist mitmekümne ja sadade meetrite kaugusel.
Teelüliti magnetvälja moonutamine saavutatakse parameetrite muutmisega magnetahel tundlik element. Muutuvateks parameetriteks võivad olla ka aktiivne pindala ja õhupilu suurus magnetiline läbilaskvus magnetahel.
Praegu on mehaaniliste kontaktasendilülitite kasutusvaldkond tööstusautomaatikas ahenemas ning tekib küsimus seda tüüpi asendilülitite kasutusest automaatjuhtimissüsteemide ehitamisel.
Viimane on põhjustatud järgmistest põhjustest:
-
Lüliti-stop-sõlme konstruktsiooni keerukus, mis on tingitud mitmete parameetrite lubatud kõikumiste piiridele esitatavate nõuete rangusest, mis põhjustab olulisi raskusi selle valmistamisel ja reguleerimisel.
-
Selle seadme täpsusomaduste suhteliselt kõrge kriitilisus destabiliseerivate tegurite mõju suhtes (kontaktpindade kulumine, kinnitusdetailide lõtvus, liikuvate elementide ebaühtlus jne).
Mitmeid mehhanismide konstruktsioonilahendusi ei saa mehaaniliste kontaktlülitite alusel üldse rakendada. Nende hulka kuuluvad mehhanismid, mis nõuavad liikumislülitite kõrget lubatud kiirust ja sagedust.
Kui maanteelüliti nõutavat töökiirust saab vähendada mehhanismi täiendavate kinemaatiliste ühenduste tõttu, mis muu hulgas halvendavad juhtimissüsteemi kvaliteediomadusi (eelkõige täpsusparameetreid), siis on lubatud töösagedus ( eraldusvõime) ei võivad suureneda struktuursete komplikatsioonide tõttu.
Vaata ka: Lõpplülitite ja lülitite paigaldus
Mis on sel juhul positsioonivahetuse mehaanilise kontaktipõhimõtte laialdase kasutamise põhjus? Vastust sellele küsimusele tuleks otsida kahest aspektist: olemasolevatest automaatjuhtimissüsteemide ehituspõhimõtetest ja kontakttee lülitusahela eelistest.
Kontakttee lülitite eelised
Mehaanilisi kontaktlüliteid, mida tavaliselt rakendatakse mitmeahelalise väljundiga, iseloomustavad järgmised eelised:
-
kõrge lülitusaste;
-
kõrge erijuhtimisvõimsus (kaasatud võimsuse ja üldmõõtmete suhe);
-
universaalsus, st võimalus lülitada nii alalis- kui ka vahelduvvooluahelaid;
-
suur valik kaasatud pingeid;
-
tühine sisemine energiatarbimine (suletud olekus kontaktide siirdetakistuse väike väärtus);
-
töö täpsuse ja stabiilsuse vähene sõltuvus kontrollitava võimsuse muutustest.
Kontakttee lülitite puudused
Nende seadmete mehaanilise kontakti põhimõte ei võimalda sageli täita automaatikasüsteemide kõrgendatud töökindluse, vastupidavuse ja täpsuse nõudeid. Lisaks on mehaanilised kontaktlülitid väga tundlikud erinevate kliimategurite mõjule (eriti madalatel temperatuuridel).
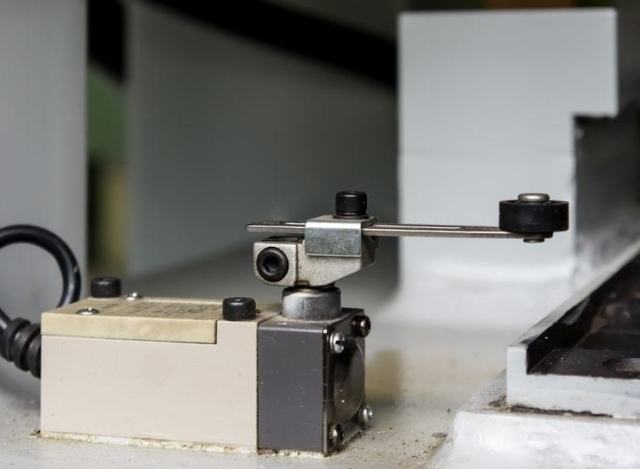
Mehhaanilisi kontaktlüliteid iseloomustavad lülituspeatuse maksimaalse ja minimaalse liikumiskiiruse piiratud lubatud tasemed, mis jäävad vahemikku 0,3–30 m / min ning lülituspiiriku kiiruse suurendamine üle lubatud taseme viib järsu languseni. lüliti mehaanilises vastupidavuses.
Sellistes lülitites on lülitusjõu toimesuuna lubatud kõrvalekalded kangi telje suhtes väga väikesed ja nende ületamine põhjustab mehaanilisi vigastusi, eriti eesmise tõmbevardaga lülitites.
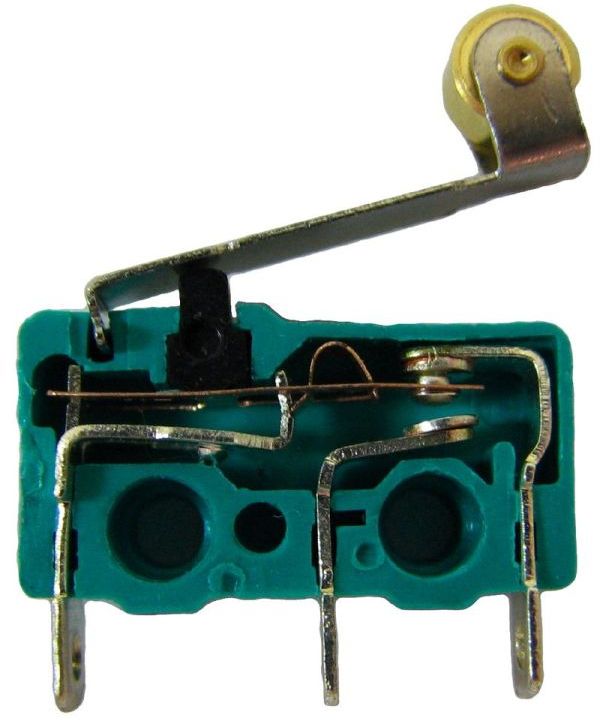
Relee väljundkarakteristikute (juhtimiskarakteristikute) saamiseks on selliste lülitite konstruktsioonis ette nähtud päästik-vedruseadmed. Relee väljundkarakteristikute nõutav tase saavutatakse lüliti vastupidavuse olulise vähenemise hinnaga, mis on tingitud suurtest dünaamilistest pingetest, mis käivituse ajal esinevad päästikus.
Mehaanilistes hetkekontaktlülitites saavutab väljundkarakteristiku hüstereesisilmuse (käigudiferentsiaali) laius märkimisväärse väärtuse, mis on mitmete tehnoloogiliste protsesside jaoks täiesti vastuvõetamatu töötlemistsükli kestuse ebaproduktiivse pikenemise tõttu.
Nende käiguvahetajate käiguvahede vähendamine on seotud kas nende disaini keerukuse või suuruse suurendamisega. Lisaks on mõnel juhul mehaaniliste kontaktlülitite käivitamiseks vaja märkimisväärseid mehaanilisi jõude.
Läheduslülitite eelised ja puudused
Eespool loetletud asjaolud tingivad vajaduse välja töötada seadmeid, millel puuduvad nimetatud puudused ja mis on samal ajal võimelised täitma sarnaseid funktsioone. Sellised seadmed on läheduslülitid, mille eelised hõlmavad järgmist:
-
märkimisväärne vastupidavus kõrge töökindluse ja kõrge lubatud töösagedusega;
-
ei vaja käivitamisel mehaanilist pingutust, madal tundlikkus vibratsioonile, kiirendusele jne;
-
parameetrite ebaoluline tundlikkus muutustele suhteliselt paljudes välistingimustes;
-
operatiivteenistuste tingimuste parandamine.
Tänu läheduslüliti tagasiside madalale tasemele saavutatakse seiskamislüliti konstruktsiooni oluline lihtsus, säilitades samal ajal täpsuskarakteristikute kõrge stabiilsuse aja jooksul. Lisaks tagab elektriliste ja mehaaniliste kontaktide puudumine nende seadmete tule- ja plahvatusohutuse, mis laiendab oluliselt nende võimalikku kasutusala.
Kontaktivabade piirlülitite üheks oluliseks puuduseks on paljude mehaaniliste kontaktpiirilülitite puhul hõlpsasti rakendatavate konstruktsioonimuudatuste rakendamise keerukus.
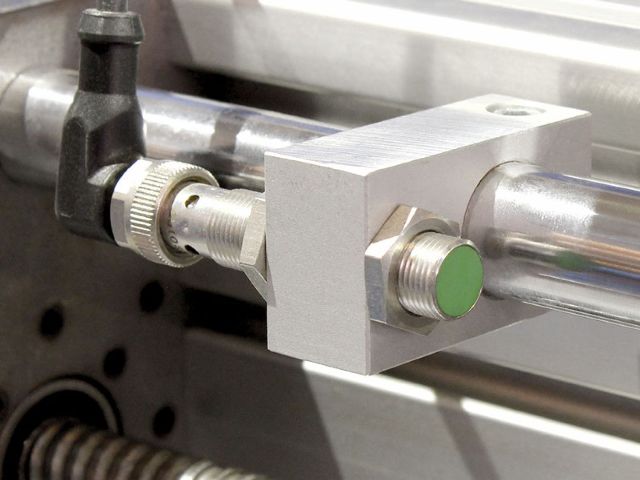
Läheduslüliti seade
Parameetrilist tüüpi staatiliste kontaktivabade teelülitite tööpõhimõte põhineb tundliku elemendi tekitatud magnet- või elektrivälja moonutuste kasutamisel, kui selle piirkonda ilmub juhtelement, mille tagajärjel tekib tasakaalustamata olek. tekib lüliti elektriahelas ja väljundseade käivitub.
Staatilised läheduslülitid tehakse kõige sagedamini ühe väljundahelaga ja mõne lüliti puhul kaasneb käivitamisega signaali ilmumine väljundisse (otsene lülitusefekt), teistes - kadumine (tagurpidi lülitusefekt), mis on samaväärne vastavalt mehaaniliste kontaktteede sulgemis- ja avamiskontaktidele.
Kui releerežiimi läheduslüliti ahelas on võimenduselement, võib anduri elemendi väljundparameeter olla pidevas funktsionaalses sõltuvuses juhitavast liikumisest.
Praegu kasutatakse arvukalt mittekontaktsete sõidulülitite konstruktsioonilisi modifikatsioone, mis erinevad tundlikkuse taseme (töövahe suuruse), pilu asukoha või tundliku elemendi tasapinna poolest paigaldustasapinna suhtes, liikumise suuna poolest. juhtjuhtmed, sensorelemendi astmete arv (piludega projekteerimiseks), pilu sügavus, ühendusjuhtmete pikkus, toitepinge tase, kaitse olemus keskkonnamõjude eest jne.
Kontaktivabade liikumislülitite kasutamise võimalused on määratud nende elektriliste ja mehaaniliste omaduste parameetritega.
Elektrilised parameetrid hõlmavad järgmist:
- väljundsignaali iseloom ja väljundahelate arv;
- tarbimine ja väljundvõimsus;
- väljundsignaali kuju; takistuse ja pinge lülituskoefitsient (trafo tüüpi lülititele);
- ajastuskarakteristikud (käivitus- ja vabastamisajad) ja süütamise sagedus (eraldusvõime);
- toitepinge tasemed ja kuju, samuti nende hälvete lubatud piirid.
Mehaanilised jõudlusparameetrid hõlmavad järgmist:
- tundlikkus (töövahe suurus),
- mõõtmed ja ühenduse mõõtmed;
- täpsuskarakteristikud (suured ja lisavead) ja käigu diferentsiaal;
- paigaldusomadused (lülituspidurite tüübid ja nende paigaldusviis, tagasiside tase, lüliti paigaldamine ja paigaldamine);
- mürakaitse tase.
Läheduslüliti seadme ja lülitite kohta lisateabe saamiseks vaadake siit: Kontaktivabad andurid mehhanismide asukoha määramiseks
Ivenski Yu. N.Kontaktivabad reisilülitid tööstusautomaatikas