Potentsiomeetrilised andurid
Potentsiomeetri andur on muutuv takisti, millele rakendatakse toitepinget, mille sisendväärtus on voolu koguva kontakti lineaar- või nurknihe ja väljundväärtus on selle kontakti poolt võetud pinge, mille suurus muutub vastavalt selle asendile. muudatusi.
Potentsiomeetrilised andurid on ette nähtud lineaarsete või nurknihkete teisendamiseks elektrisignaaliks, samuti kõige lihtsamate funktsionaalsete sõltuvuste reprodutseerimiseks pideva tüüpi automaatsetes ja automaatsetes seadmetes.
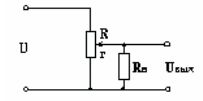
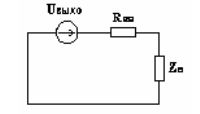
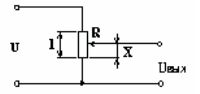 Potentsiomeetrilise anduri ühendusskeem
Potentsiomeetrilise anduri ühendusskeem
Takistuse järgi jagunevad potentsiomeetrilised andurid
-
pideva takistusega lamellid;
-
pideva mähisega traadipool;
-
takistusliku kihiga.

Lamell-potentsiomeetrilisi andureid kasutati teatud konstruktsioonivigade tõttu suhteliselt jämedate mõõtmiste läbiviimiseks.
Sellistes andurites on lamellide külge joodetud konstantsed takistid, mis on nominaalselt valitud erilisel viisil.
Lamell on vahelduvate juhtivate ja mittejuhtivate elementidega struktuur, millel kollektori kontakt libiseb.Voolukollektori teisaldamisel ühelt juhtivalt elemendilt teisele muutub sellega ühendatud takistite kogutakistus summas, mis vastab ühe takistuse nimiväärtusele. Resistentsuse muutus võib toimuda laias vahemikus. Mõõtmisvea määrab kontaktpatjade suurus.
Lamellar potentsiomeetri andur
Traatpotentsiomeetri andurid on mõeldud täpsemateks mõõtmisteks. Nende kavanditeks on reeglina getinaksist, tekstoliidist või keraamikast valmistatud raam, millele on ühes kihis keritud peenike traat, pöörded, mille puhastatud pinnal libiseb voolukollektor.
Traadi läbimõõt määrab täpsusklass potentsiomeetri andur (kõrge on 0,03-0,1 mm, madal on 0,1-0,4 mm). Traadi materjalid: manganiin, fekraal, väärismetallidel põhinevad sulamid. Libisemisrõngas on valmistatud pehmemast materjalist, et vältida traadi hõõrdumist.
Potentsiomeetri andurite eelised:
-
disaini lihtsus;
-
väike suurus ja kaal;
-
staatiliste omaduste kõrge lineaarsus;
-
omaduste stabiilsus;
-
võimalus töötada vahelduv- ja alalisvoolul.
Potentsiomeetri andurite puudused:
-
libiseva kontakti olemasolu, mis võib põhjustada kahjustusi kontaktjälje oksüdeerumise, pöörete hõõrdumise või liuguri painutamise tõttu;
-
koormuse tõttu tööviga;
-
suhteliselt väike teisendustegur;
-
kõrge tundlikkuse lävi;
-
müra olemasolu;
-
vastuvõtlikkus elektrilise erosiooni tekkeks impulsslahenduste mõjul.

Potentsiomeetriliste andurite staatiline karakteristik
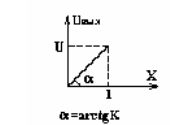
Pöördumatu potentsiomeetrilise anduri staatiline karakteristik
Vaatleme näiteks pideva mähisega potentsiomeetri andurit. Potentsiomeetri klemmidele rakendatakse vahelduv- või alalispinge U. Sisendväärtus on nihe X, väljundväärtus on pinge Uout. Tühikäigurežiimis on anduri staatiline karakteristik lineaarne, kuna seos on tõene: Uout = (U / R) r,
kus R on pooli takistus; r on pooli osa takistus.
Arvestades, et r / R = x / l, kus l on mähise kogupikkus, saame Uout = (U / l) x = Kx [V / m],
kus K on anduri konversiooni (edastus) koefitsient.
Ilmselgelt selline andur ei reageeri sisendsignaali märgi muutumisele (andur on pöördumatu). On skeeme, mis on allkirjade muutumise suhtes tundlikud. Sellise anduri staatiline omadus on joonisel näidatud kujul.
Potentsiomeetri anduri pööratav ahel
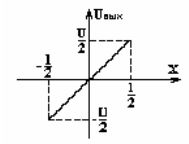
Pööratava potentsiomeetrilise anduri staatiline karakteristik
Saadud ideaalsed omadused võivad erinevat tüüpi vigade olemasolu tõttu tegelikest oluliselt erineda:
1. Surnud tsoon.
Väljundpinge varieerub diskreetselt pöördest pöördeni, st. see tsoon tekib siis, kui väikese sisendväärtuse korral Uout ei muutu.
Pinge hüppe suurus määratakse valemiga: DU = U / W, kus W on pöörete arv.
Tundlikkuse lävi määratakse mähise traadi läbimõõduga: Dx = l / W.
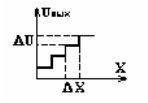
Potentsiomeetriline andur surnud riba jaoks
2. Staatiliste karakteristikute ebakorrapärasus traadi läbimõõdu, takistuse ja mähise sammu varieeruvuse tõttu.
3. Viga tagasilöögist, mis tekkis mootori pöörlemistelje ja juhthülsi vahel (selle vähendamiseks kasutatakse survevedrusid).
4.Viga hõõrdumise tõttu.
Potentsiomeetri anduri harja käitava elemendi väikese võimsuse korral võib hõõrdumise tõttu tekkida stagnatsioonitsoon.
Harja survet tuleb hoolikalt reguleerida.
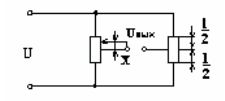
5. Koormuse mõjust tingitud viga.
Olenevalt koormuse iseloomust tekib tõrge nii staatilises kui dünaamilises režiimis. Aktiivse koormuse korral muutub staatiline karakteristik. Väljundpinge väärtus määratakse järgmise avaldise järgi: Uout = (UrRn) / (RRn + Rr-r2)
Need. Uout = f (r) sõltub Rn-st. Rn >> R abil saab näidata, et Uout = (U / R) r;
kui Rn on ligikaudu võrdne R-ga, on sõltuvus mittelineaarne ja anduri maksimaalne viga on siis, kui liugur kaldub kõrvale (2/3))l. Tavaliselt valitakse Rн / R = 10 … 100. Vea suuruse x = (2/3) l korral saab määrata avaldise abil: E = 4/27η, kus η= Rн / R — koormustegur.
Potentsiomeetriline andur koormuse all
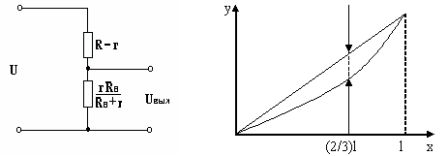 a — koormusega potentsiomeetrilise anduri ekvivalentahel, b — koormuse mõju potentsiomeetrilise anduri staatilisele karakteristikule.
a — koormusega potentsiomeetrilise anduri ekvivalentahel, b — koormuse mõju potentsiomeetrilise anduri staatilisele karakteristikule.
Potentsiomeetriliste andurite dünaamilised omadused
Edastamise funktsioon
Ülekandefunktsiooni tuletamiseks on mugavam võtta väljundväärtuseks koormusvool; seda saab määrata ekvivalentgeneraatori teoreemi abil. B = Uout0 / (Rvn + Zn)
Mõelge kahele juhtumile:
1. Koormus on puhtalt aktiivne Zn = Rn, kuna Uout0 = K1x In = K1x / (Rin + Rn)
kus K1 on anduri tühikäigu kiirus.
Laplace'i teisenduse rakendamisel saame ülekandefunktsiooni W (p) = In (p) / X (p) = K1 / (Rin + Rn) = K
Nii saime inertsiaalse ühenduse, mis tähendab, et anduril on kõik sellele ühendusele vastavad sagedus- ja ajakarakteristikud.
Samaväärne vooluring
2. Induktiivne koormus aktiivse komponendiga.
U = RvnIn + L (dIn / dt) + RnIn
Laplace'i teisenduse rakendamisel saame Uoutx (p) = In (p) [(Rvn + pL) + Rn]
Teisenduste kaudu võib jõuda ülekandefunktsioonini kujul W (p) = K / (Tp + 1) — esimest järku aperioodilist seost,
kus K = K1 / (Rvn + Rn)
T = L/(Rvn + Rn);
Potentsiomeetri anduri sisemine müra
 Nagu näidatud, muutub harja pöördelt pöördele liikumisel väljundpinge järsult. Astumisel tekkiv viga on ülekandefunktsiooni väljundpingele peale kantud saehamba pinge näol, s.o. on müra. Kui hari vibreerib, tekitab liikumine ka müra (häireid). Vibratsioonimüra sagedusspekter on helisagedusvahemikus.
Nagu näidatud, muutub harja pöördelt pöördele liikumisel väljundpinge järsult. Astumisel tekkiv viga on ülekandefunktsiooni väljundpingele peale kantud saehamba pinge näol, s.o. on müra. Kui hari vibreerib, tekitab liikumine ka müra (häireid). Vibratsioonimüra sagedusspekter on helisagedusvahemikus.
Vibratsiooni kõrvaldamiseks on pantograafid valmistatud mitmest erineva pikkusega juhtmest, mis on kokku volditud. Siis on iga juhtme loomulik sagedus erinev, see hoiab ära tehnilise resonantsi ilmnemise. Soojusmüra tase on madal, neid võetakse arvesse eriti tundlikes süsteemides.
Funktsionaalsed potentsiomeetrilised andurid
Tuleb märkida, et automatiseerimises kasutatakse mittelineaarsete sõltuvuste saamiseks sageli funktsionaalseid ülekandefunktsioone, mis on konstrueeritud kolmel viisil:
-
traadi läbimõõdu muutmine mööda mähist;
-
pooli sammu muutus;
-
teatud konfiguratsiooniga raami kasutamine;
-
manööverdades erineva suurusega takistustega lineaarsete potentsiomeetrite sektsioone.
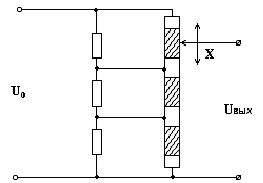
Näiteks ruutsõltuvuse saamiseks kolmanda meetodi järgi on vaja raami laiust lineaarselt muuta, nagu on näidatud joonisel.
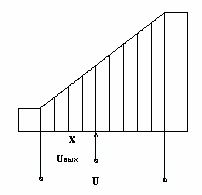
Funktsionaalne potentsiomeetri andur
Mitme pöördega potentsiomeeter
Tavalistel potentsiomeetri anduritel on piiratud tööpiirkond. Selle väärtuse määravad raami geomeetrilised mõõtmed ja pooli keerdude arv. Need ei saa lõputult suureneda. Seetõttu on rakendust leidnud mitme pöördega potentsiomeetrilised andurid, kus takistuselement on keerutatud mitme pöördega spiraaljoones, nende telge tuleb mitu korda pöörata, et mootor liiguks mähise ühest otsast teise, s.t. selliste andurite elektriline ulatus on 3600-kordne.
Mitme pöördega potentsiomeetrite peamine eelis on nende kõrge eraldusvõime ja täpsus, mis saavutatakse tänu takistusliku elemendi suurele pikkusele ja väikeste mõõtmetega.
Fotopotentsiomeetrid
Fotopotentsiomeeter — on tavalise takistuskihiga potentsiomeetri kontaktivaba analoog, milles mehaaniline kontakt on asendatud fotojuhtivaga, mis loomulikult suurendab töökindlust ja kasutusiga. Fotopotentsiomeetri signaali juhib valgussond, mis toimib liugurina. See on moodustatud spetsiaalse optilise seadme abil ja seda saab nihutada välise mehaanilise toime tulemusena piki fotojuhtivat kihti. Fotokihi eksponeerimise kohas tekib liigne (võrreldes pimedaga) fotojuhtivus ja tekib elektriline kontakt.
Fotopotentsiomeetrid jagunevad otstarbe järgi lineaarseteks ja funktsionaalseteks.
Funktsionaalsed fotopotentsiomeetrid võimaldavad valgusallika ruumilise liikumise muuta etteantud funktsionaalse vormiga elektrisignaaliks tänu profileeritud takistuskihile (hüperboolne, eksponentsiaalne, logaritmiline).