Konveieri ajamiketid
 Artiklis vaadeldakse mõne konveieri elektriajami skeeme. Joonisel fig. 1 on kujutatud üksikute konveieriliinide elektriajami skemaatiline diagramm, mille kiirused peavad olema rangelt samad. Selline vajadus tekib pidevas tootmises, kui erinevad tooted peavad pärast vajalikke tehnoloogilisi operatsioone eraldi liinidel kokku puutuma montaažiplatsil üksteisega ranges kooskõlas.
Artiklis vaadeldakse mõne konveieri elektriajami skeeme. Joonisel fig. 1 on kujutatud üksikute konveieriliinide elektriajami skemaatiline diagramm, mille kiirused peavad olema rangelt samad. Selline vajadus tekib pidevas tootmises, kui erinevad tooted peavad pärast vajalikke tehnoloogilisi operatsioone eraldi liinidel kokku puutuma montaažiplatsil üksteisega ranges kooskõlas.
Skeem võimaldab korraga käivitada ja peatada mitu konveieriliini ning reguleerida nende kiirust. Koordineeritud liikumine saavutatakse mootorite ümberlülitamisega sünkroonvõlli skeemi järgi ühise inverteri sagedusmuunduriga. Mootorite D1 ja D2 kiiruse reguleerimine toimub inverteri kiiruse muutmisega muutuva ülekandearvuga käigukasti P abil.
Konveierite käivitamise loa annavad operaatorid, kes jälgivad konveierite tööd kõige kriitilisemates kohtades. Valmisoleku nuppude G1 ja G2 vajutamisel süttivad signaallambid LS1 ja LS2 ning aktiveeritakse releed RG1 ja RG2. Viimased valmistavad relee ette RP käivitamiseks.
Kui vajutate nuppu Start, käivitub RP, mis lülitab sisse kontaktori L1. Inverteri asendis D1 ja D2 on ühefaasiline sünkroniseerimine. Pärast viivitust lülitavad kontaktoritesse L1 ja L2 sisseehitatud pendelreleed L2 vaheldumisi sisse, L1 välja ja LZ sisse. Sagedusmuunduri mootori reostaadi käivitamine toimub ajapõhimõtte järgi (ajareleed RU1, RU2, RUZ).
Joonisel fig. 2 on kujutatud metroo eskalaatori elektriajami skeem, mis võimaldab teil töötada reisijate tõusul ja langemisel. Ajamimootorina kasutatakse faasirootoriga asünkroonset mootorit võimsusega kuni 200 kW. Teatud kellaaegadel võib eskalaator ebaolulise reisijatevoo korral töötada pikka aega peaaegu tühikäigul.
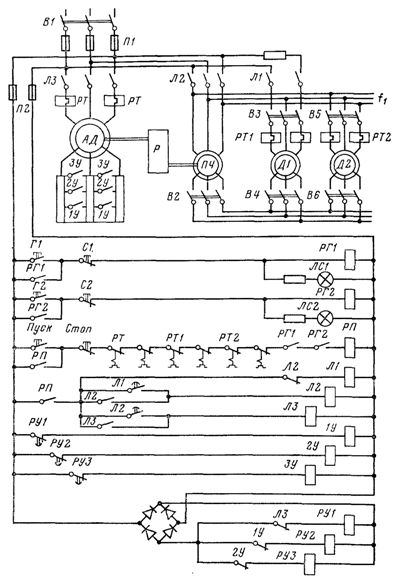
Riis. 1. Koordineeritud liikumisega konveieriliinide elektriajami skeem.
Mootori võimsusteguri ja efektiivsuse suurendamiseks, kui selle võlli koormust vähendatakse umbes 40% -ni nimiväärtusest, lülitatakse staatori mähis kolmnurkselt täheks. Koormuse suurenedes muutub see tagasi kolmnurgaks.
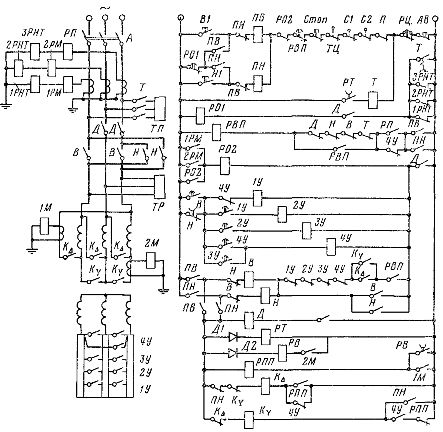
Riis. 2. Metroo eskalaatori elektriajami skeem.
Nimetatud lülitamine toimub automaatselt liigvoolureleede 1M ja 2M poolt, mis juhivad k∆ ja kY kontaktoreid läbi RPP ja РВ releede. Avanemisviivitusega RV-kontakt tagab RPP pooli vooluringi olemasolu ajavahemikus 2M väljas ja 1M sees.
Täiskoormusega generaatori laskumisrežiimis koormatakse mootorit oluliselt vähem (paigaldise mehaaniliste kadude tõttu) kui sarnase koormuse korral tõusurežiimis.Seetõttu on ripprežiimis mootori staatori mähis alati tähega ühendatud. Mootor käivitatakse aja funktsioonina, kasutades kiirendi kontaktoritel 1U-4U pendelreleed. Peatus on mehaaniline. Sel juhul paigaldatakse sõidupidur TP mootori võllile ja ohutus TP veoülekande võllile, et tagada redel seiskumine, kui mehaaniline ühendus hammasratta ja mootori võllide vahel katkeb.
Ahel rakendab eelmises jaotises kirjeldatud tüüpilisi turvablokeeringuid: seadme mehaanilise osa rikke tõttu - kettide ja käsipuude eemaldamine (piirlülitid TC, P), astmete struktuuri rikkumine (piirlülitid C1 ja C2). ), laagrite liigne temperatuur (termorelee 7), ülekiiruse tõttu (tsentrifugaalkiiruse relee RC).
Lisaks on tagatud mootorikaitse: maksimaalne (relee 1RM, 2RM), ülekoormuse eest (relee RP), mootori võimsuse kadumise eest (nullvoolurelee 1RNT, 2RNT, 3RNT), toitekontaktorite sulgemiskontaktide keevitamise eest. ( avavad kontaktid D, Y, B, T mähisahelas RVP ja 1U-4U mähisahelas B).
Kaitse toitekadu, laagrite ülekuumenemise ja mootori ülekoormuse eest töötab ajarelee PO1 ja RVP poolt määratud viivitusega. Kõik kaitsed, välja arvatud kaugjuhtimispuldi kiirusrelee, peatavad mootori, ühendades selle vooluvõrgust lahti ja rakendades TP tööpidurit. Alles pidurdusprotsessi lõpus, pärast PT-relee viivituse möödumist, rakendub lisaks turvapidur TP.Kui RC kiirusrelee aktiveeritakse või hädaseiskamisnuppu vajutatakse, rakenduvad mõlemad pidurid korraga.