Tehnoloogiliste parameetrite andurid — jõud, rõhk, pöördemoment
Tehnoloogiliste protsesside automatiseeritud ja ülitäpse juhtimise rakendamiseks on alati vajalik, et teie käsutuses oleks teave peamiste tehnoloogiliste parameetrite hetkeväärtuste kohta. Tavaliselt kasutatakse selleks erinevaid andureid: jõud, rõhk, pöördemoment jne Vaatame kolme tüüpi andureid, mõistame nende tööpõhimõtet.

Kõigepealt märgime, et jõu- või pöördemomendiandurite konstrueerimisel kasutatakse tundlikke elemente, mille teatud omadused muutuvad vastavalt ühest või teisest välismõjust tuleneva deformatsiooni hetkeastmele.
Need võivad olla elastsed metallplaadid, vedrud või võllid, mille deformatsioon kandub üle magnetostriktiivsele, piesoelektrilisele või pooljuhtelemendile, mille elektrilised või magnetilised parameetrid sõltuvad otseselt deformatsiooni astmest. Piisab selle parameetri mõõtmisest, et saada aimu deformatsiooni suurusest ja vastavalt ka jõust (rõhk, pöördemoment).
Tensomeetrilised deformatsioonimõõturid

Lihtsaim tensoandur, mis põhineb pingemõõturi traadi muundur hõlmab mehaanilist elastset elementi, mis allutatakse deformatsioonile, ja sellele kinnitatud tensoandurit, mille deformatsioon muundatakse otse elektrisignaaliks.
Tensoandurina toimib õhuke (läbimõõduga 15–60 mikronit) nikroom-, konstant- või ellinvartraat, mis on ussiga kokku volditud ja kilealusele kinnitatud. Selline muundur on liimitud pinnale, mille deformatsiooni mõõta.
Mehaanilise elastse elemendi deformatsioon põhjustab traadi venitamist või kokkusurumist selle pikkuses, samal ajal kui selle ristlõige väheneb või suureneb, mis mõjutab muunduri elektrivoolu takistuse muutumist.
Mõõtes seda takistust (pingelangust üle selle), saame aimu mehaanilise deformatsiooni suurusest ja vastavalt ka jõust, eeldusel, et deformeerunud elemendi mehaanilised parameetrid on teada.
Manomeetri pöördemomendi andurid

Jõumomendi mõõtmiseks kasutatakse tundlikke elastseid elemente vedrude või õhukeste võllide kujul, mis tehnoloogilise protsessi käigus väänatakse. Elastne nurkdeformatsioon, st vedru alguse ja lõpu suhteline nurk, mõõdetakse ja teisendatakse elektrisignaaliks.
Elastne element on tavaliselt suletud torusse, mille üks ots on fikseeritud paigal ja teine on ühendatud nurknihke anduriga, mis mõõdab toru otste ja deformeeritava elemendi vahelist lahknemisnurka.
Seega saadakse signaal, mis kannab teavet pöördemomendi suuruse kohta.Vedrult signaali eemaldamiseks ühendatakse pingetakisti elemendi juhtmed libisemisrõngaste abil harjadega.
Magnetostriktiivse jõu andurid
Samuti on jõuandurid koos deformatsioonimõõturi magnetostriktiivse muunduriga. Siin kasutatud pöördmagnetostriktsiooni nähtus (Villari efekt), mis seisneb selles, et kui raua-nikli sulamist (näiteks permaloidist) valmistatud südamikule avaldatakse survet, muutub selle magnetiline läbilaskvus.
Südamiku pikisuunaline kokkusurumine viib laienemiseni selle hüstereesisilmused, väheneb silmuse järskus, mis viib vastavalt magnetilise läbilaskvuse väärtuse vähenemiseni — anduri mähiste induktiivsuse või vastastikuse induktiivsuse vähenemiseni.
Kuna magnetilised karakteristikud on mittelineaarsed ja ka seetõttu, et temperatuur mõjutab neid oluliselt, on vaja kasutada kompensatsiooniahelat.
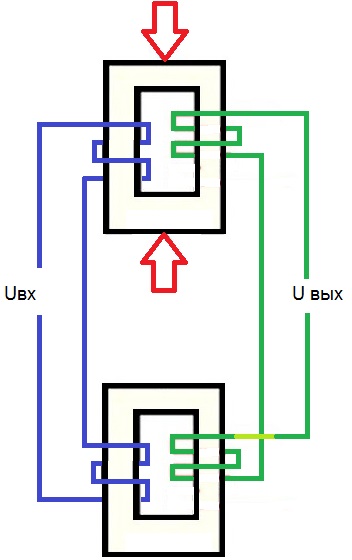
Hüvitistele kehtib järgmine üldine skeem. Nikkel-tsinkferriidist valmistatud suletud magnetostriktiivsele magnetsüdamikule mõjub mõõdetav jõud. Selline südamik ei koge jõurõhku, kuid kahe juhtme mähised on omavahel ühendatud, seega toimub kogu EMF-i muutus.
Primaarmähised on identsed ja ühendatud järjestikku, toiteallikaks on vahelduvvool sagedusega kümne kilohertsi piires, sekundaarmähised (ka samad) on sisse lülitatud vastupidiselt ja deformeeriva jõu puudumisel on kogu EMF 0. Kui rõhk esimesele südamikule suurenes, on kogu EMF väljundis nullist erinev ja võrdeline deformatsiooniga.