Tenomeetrid — tensomeetrilised mõõtemuundurid
Tensoandur — parameetriline takistusandur, mis muudab jäiga keha deformatsiooni, mis on põhjustatud sellele rakendatud mehaanilisest pingest, elektriliseks signaaliks.
Takistuslik manomeeter on alus, mille külge on kinnitatud tundlik element. Tensomõõturi abil deformatsioonimõõtmise põhimõte seisneb selles, et deformatsioonimõõturi takistus muutub deformatsiooni käigus. Metalljuhi takistuse muutumise mõju igakülgse kokkusurumise (hüdrostaatilise rõhu) toimel avastas 1856. aastal Lord Kelvin ja 1881. aastal OD Hvolson.
Kaasaegsel kujul kujutab tensoandur konstruktsiooniliselt deformatsioonitakistit, mille tundlik element on valmistatud tõmbetundlikust materjalist (traat, foolium jne), mis on kinnitatud sideainega (liim, tsement) uuritavale osale. (Joonis 1). Anduri elemendi ühendamiseks elektriahelaga on pingeanduril juhtmed.Mõned pingeandurid on mõeldud paigaldamise hõlbustamiseks, neil on tundliku elemendi ja testitava osa vahel asuv padi, samuti kaitseelement, mis asub tundliku elemendi kohal.
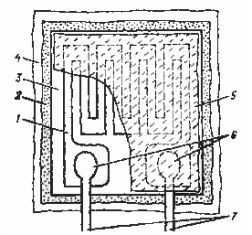
Joonis 1 Tensoanduri skeem: 1- tundlik element; 2- sideaine; 3- substraat; 4- uuritud detail; 5- kaitseelement; 6- plokk jootmiseks (keevitus); 7-juhtmeline juhtmestik
Kuna pingeandurite abil lahendatakse mitmesuguseid ülesandeid, saab eristada kahte peamist nende kasutusvaldkonda:
— materjalide füüsikaliste omaduste, detailide ja konstruktsioonide deformatsioonide ja pingete uurimine;
— tensomõõturite kasutamine mehaaniliste väärtuste mõõtmiseks, mis muundatakse elastse elemendi deformatsiooniks.
Esimest juhtumit iseloomustab pinge mõõtmispunktide märkimisväärne arv, keskkonnaparameetrite laiad muutused, aga ka mõõtekanalite kalibreerimise võimatus. Sel juhul on mõõtmisviga 2-10%.
Teisel juhul on andurid kalibreeritud vastavalt mõõdetud väärtusele ja mõõtmisvead jäävad vahemikku 0,5-0,05%.

Kõige markantsem näide tensomõõturite kasutamisest on tasakaal. Enamiku Venemaa ja välismaiste tootjate kaalud on varustatud pingemõõturitega. Koormusandurkaalusid kasutatakse erinevates tööstusharudes: värviliste ja mustade metallurgias, keemia-, ehitus-, toiduainetööstuses ja muudes tööstusharudes.
Elektrooniliste kaalude tööpõhimõte taandub koormusandurile mõjuva gravitatsioonijõu mõõtmisele, teisendades sellest tulenevad muutused, nagu deformatsioon, proportsionaalseks väljundelektrisignaaliks.
Tensortakistite laialdast kasutamist seletatakse nende mitmete eelistega:
— väike suurus ja kaal;
— madal inerts, mis võimaldab kasutada deformatsioonimõõtureid nii staatiliste kui ka dünaamiliste mõõtmiste jaoks;
— olema lineaarse karakteristikuga;
— võimaldada mõõtmisi teha eemalt ja paljudes punktides;
— nende paigaldamise meetod uuritavale osale ei nõua keerukaid seadmeid ega moonuta uuritava detaili deformatsioonivälja.
Ja nende puudust, milleks on temperatuuritundlikkus, saab enamikul juhtudel kompenseerida.
Konverterite tüübid ja nende disainifunktsioonid
Tensomõõturite töö põhineb deformatsiooniefektil, mis seisneb juhtmete aktiivtakistuse muutumises nende mehaanilise deformatsiooni käigus. Materjali deformatsiooniefekti tunnuseks on suhtelise deformatsioonitundlikkuse koefitsient K, mis on määratletud kui takistuse muutuse ja juhi pikkuse muutuse suhe:
k = er / el
kus er = dr / r — juhi takistuse suhteline muutus; el = dl / l — traadi pikkuse suhteline muutus.
Tahkete kehade deformeerumisel on nende pikkuse muutus seotud ruumala muutumisega ning muutuvad ka nende omadused, eelkõige takistusväärtus. Seetõttu tuleks tundlikkuse koefitsiendi väärtust üldjuhul väljendada kujul
K = (1 + 2μ) + m
Siin iseloomustab suurus (1 + 2μ) takistuse muutust, mis on seotud juhi geomeetriliste mõõtmete (pikkuse ja ristlõike) muutumisega, ja — materjali takistuse muutust, mis on seotud selle füüsikalise muutumisega. omadused.
Kui tensori valmistamisel kasutatakse pooljuhtmaterjale, määrab tundlikkuse peamiselt võrematerjali omaduste muutumine selle deformatsiooni ajal ja K »m ning see võib erinevate materjalide puhul varieeruda vahemikus 40 kuni 200.
Kõik olemasolevad muundurid võib jagada kolme põhitüüpi:
- traat;
- foolium;
- Film.

Traattelemeetreid kasutatakse mitteelektriliste suuruste kahesuunalise mõõtmise tehnikas.
Esimene suund on juhi deformatsiooniefekti kasutamine mahulise kokkusurumise olekus, kui muunduri loomulikuks sisendväärtuseks on ümbritseva gaasi või vedeliku rõhk. Sel juhul on andur traadi (tavaliselt manganiini) mähis, mis asetatakse mõõdetud rõhu piirkonda (vedelik või gaas). Konverteri väljundväärtus on selle aktiivse takistuse muutus.
Teine suund on kasutada pingetundlikust materjalist valmistatud pingutustraadi tõmbeefekti. Sel juhul kasutatakse pingeandureid "tasuta" muundurite ja liimitud kujul.
"Tasuta" tensomõõturid on valmistatud ühe või rea juhtmete kujul, mis on fikseeritud liikuvate ja liikuvate osade otstes ning täidavad reeglina samaaegselt elastse elemendi rolli. Selliste andurite loomulik sisendväärtus on liikuva osa väga väike liikumine.
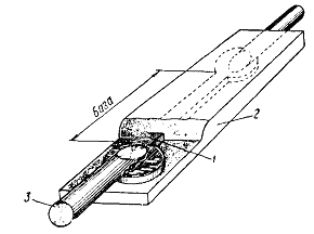
Enimlevinud sidetraadi tensomõõturi seade on näidatud joonisel 2. Õhuke 0,02–0,05 mm läbimõõduga traat, mis on asetatud siksakiliselt, liimitakse õhukese paberi või lakiga fooliumi ribale. Traadi otstega ühendatakse pliiga vasktraadid. Konverteri ülaosa on kaetud lakikihiga ja mõnikord suletud paberi või vildiga.
Andur paigaldatakse tavaliselt nii, et selle pikim külg on orienteeritud mõõdetava jõu suunas. Selline katsekeha külge liimitud muundur tajub selle pinnakihi deformatsioone. Seega on liimitud muunduri loomulikuks sisendväärtuseks selle detaili pinnakihi deformatsioon, millele see on liimitud, ja väljundiks muunduri takistuse muutus, mis on võrdeline selle deformatsiooniga. Üldiselt kasutatakse liimitud andureid palju sagedamini kui liimimata andureid.
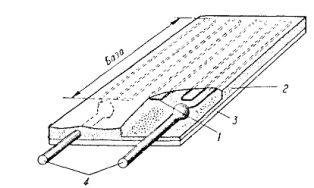
Joonis 2 - ühendatud traadi tensomõõtur: 1 - pingemõõturi traat; 2- liim või tsement; 3- tsellofaanist või paberist alus; 4-juhtmelised juhtmed
Anduri mõõtealus on traadi poolt hõivatud osa pikkus. Kõige sagedamini kasutatavad muundurid on 5-20 mm alused, mille takistus on 30-500 oomi.
Lisaks kõige tavalisemale kontuuri deformatsioonimõõturi konstruktsioonile on ka teisi. Kui on vaja anduri mõõtealust vähendada (3–1 mm-ni), tehakse seda mähismeetodil, mis seisneb koormustundliku traadi spiraali kerimises ümmarguse ristlõikega toru külge. õhuke paber. Seejärel see toru liimitakse, eemaldatakse tornist, tasandatakse ja juhtmed kinnitatakse traadi otstesse.
Kui termokonverteriga vooluringist on vaja saada suurt voolu, siis kasutatakse sageli mähitud juhtmega "Võimsaid" pingeandureid... Koosnevad suurest hulgast (kuni 30 — 50) paralleelselt ühendatud juhtmetest, erinevad suurtes suurustes (aluse pikkus 150–200 mm) ja võimaldavad oluliselt suurendada muundurit läbivat voolu (joonis 3).
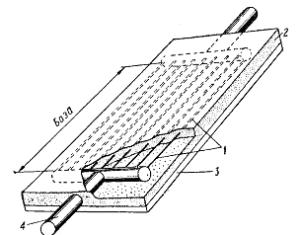
Joonis 3- Madala takistusega tenomeeter ("võimas"): 1 — tenomõõturi traat; 2- liim või tsement; 3- tsellofaanist või paberist alus; 4 pin traat
Traatsondidel on prooviga (substraadiga) väike kontaktpind, mis vähendab kõrgetel temperatuuridel lekkevoolusid ja toob kaasa kõrgema isolatsioonipinge tundliku elemendi ja proovi vahel.
Fooliumist koormusandurid on kõige populaarsem versioon kleepuvatest koormusanduritest. Fooliumiandurid on 4–12 mikroni paksune fooliumiriba, millele valitakse söövitamise teel osa metallist nii, et ülejäänud osa moodustab joonisel 4 näidatud juhtvõre.
Sellise ruudustiku valmistamisel võib ette näha mis tahes ruudustiku mustrit, mis on fooliumist tensomõõturite oluline eelis. Joonisel 4 on näidatud fooliumanduri välimus, mis on mõeldud lineaarsete pingeseisundite mõõtmiseks, joonisel fig. 4, c - võllile liimitud fooliummuundur pöördemomentide mõõtmiseks ja joonisel fig. 4, b — membraanile liimitud.
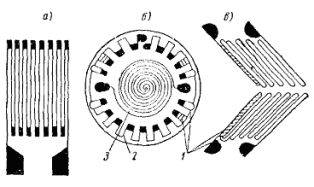
Joonis 4- Fooliummuundurid: 1- reguleerimisaasad; 2- membraani tõmbejõududele tundlikud painded; 3- pöörded, mis on tundlikud diafragma survejõudude suhtes
Fooliummuundurite tõsine eelis on võimalus suurendada konverteri otste ristlõiget; juhtmete keevitamist (või jootmist) saab sel juhul teha palju usaldusväärsemalt kui traatmuunduritega.
Fooliumdeformaatoritel on traatidega võrreldes suurem tundliku elemendi pinna ja ristlõikepindala (tundlikkus) suhe ning need on kriitilistel temperatuuridel ja püsivatel koormustel stabiilsemad. Suur pindala ja väike ristlõige tagavad ka hea temperatuurikontakti anduri ja proovi vahel, mis vähendab anduri isekuumenemist.
Fooliumist tensomõõturite tootmiseks kasutatakse samu metalle, mis telenomeetrite puhul (konstantaan, nikroom, nikli-raua sulam jne), samuti kasutatakse muid materjale, näiteks titaani-alumiiniumi sulamit 48T-2, mis mõõdab. pingeid kuni 12 %, samuti mitmeid pooljuhtmaterjale.
Filmi tensorid
Viimastel aastatel on tekkinud teine meetod sidestatud takistustüvede masstootmiseks, mis seisneb deformatsioonitundliku materjali vaakuumsublimeerimises ja selle järgnevas kondenseerimises substraadil, mis pihustatakse otse toorikule. Selliseid andureid nimetatakse kileanduriteks. Selliste deformatsioonimõõturite väike paksus (15-30 mikronit) annab olulise eelise pingete mõõtmisel dünaamilises režiimis kõrgetel temperatuuridel, kus deformatsioonimõõtmine on spetsialiseerunud uurimisvaldkond.
Mitmed vismutil, titaanil, ränil või germaaniumil põhinevad kilede tensomõõturid on valmistatud ühe juhtiva riba kujul (joonis 5).Selliste andurite puuduseks ei ole anduri suhtelise tundlikkuse vähendamine võrreldes selle materjali tundlikkusega, millest andur on valmistatud.
Joonis 5- kile tensoandur: 1- tensomõõturi kile; 2- lakifoolium; 3-kontaktiline juhe
Metallkilepõhise anduri deformatsioonikoefitsient on 2-4 ja selle takistus varieerub vahemikus 100 kuni 1000 oomi. Pooljuhtkile baasil valmistatud muundurid on koefitsiendiga suurusjärgus 50-200 ja on seetõttu rakendatava pinge suhtes tundlikumad. Sel juhul ei ole vaja kasutada võimendiahelaid, kuna pooljuhi deformatsioonitakisti silla väljundpinge on ligikaudu 1 V.
Kahjuks varieerub pooljuhtmuunduri takistus sõltuvalt rakendatavast pingest ja on sisuliselt mittelineaarne kogu pingevahemiku ulatuses ning on ka suuresti temperatuurist sõltuv. Seega, kuigi metallkiledeformaatoriga töötamisel on vaja võimendit, on lineaarsus väga kõrge ja temperatuuriefekti saab kergesti kompenseerida.