Vahelduvvoolu elektrimasinad
Elektrimasinaid kasutatakse mehaanilise energia muundamiseks elektrienergiaks (vahelduv- ja alalisvoolugeneraatorid) ja vastupidi (elektrimootorid).
Kõigil neil juhtudel kasutatakse elektromagnetismi valdkonnas sisuliselt kolme peamist avastust: voolude mehaanilise vastasmõju nähtust, mille avastas Ampere 1821. aastal, elektromagnetilise induktsiooni fenomeni, mille Faraday avastas 1831. aastal, ja nende nähtuste teoreetilise kokkuvõtte, mille tegi Ampere. Lenz (1834) oma tuntud indutseeritud voolu suuna seaduses (tegelikult ennustas Lenzi seadus elektromagnetiliste protsesside jaoks energia jäävuse seadust).

Mehaanilise energia muundamiseks elektrienergiaks või vastupidi on vaja tekitada juhtiva ahela suhteline liikumine voolu ja magnetväljaga (magnet või vool).
Pidevaks tööks mõeldud elektrimasinates kasutatakse liikuva osa (staatori) sees paikneva masina liikuva osa (vahelduvvoolumasina rootori) pöörlevat liikumist.Masina pooli, mis loob magnetvälja, nimetatakse induktiivpooliks ja töövooluga ringi voolavat mähist nimetatakse armatuuriks. Mõlemat viimast terminit kasutatakse ka alalisvoolumasinate puhul.
Magnetilise induktsiooni suurendamiseks asetatakse masina mähised ferromagnetilistele kehadele (teras, malm).
Kõikidel elektrimasinatel on pööratavus, see tähendab, et neid saab kasutada nii elektrienergia generaatoritena kui ka elektrimootoritena.

Asünkroonsed mootorid
Kasutatakse asünkroonseid mootoreid üks elektromagnetilise induktsiooni ilmingutest… Füüsikakursustes näidatakse seda järgmiselt:
Vasest ketta alla, mis võib pöörata ümber selle keskpunkti läbiva vertikaaltelje, on paigutatud vertikaalne hobuserauamagnet, mida juhitakse pöörlema ümber sama telje (ketta ja magneti vaheline mehaaniline interaktsioon on välistatud). Sel juhul hakkab ketas pöörlema magnetiga samas suunas, kuid väiksema kiirusega. Kui suurendate ketta mehaanilist koormust (näiteks suurendades telje hõõrdumist tõukelaagri vastu), siis selle pöörlemiskiirus väheneb.
Selle nähtuse füüsikalist tähendust on lihtne seletada elektromagnetilise induktsiooni teooriaga: magneti pöörlemisel tekib pöörlev magnetväli, mis indutseerib kettas pöörisvoolusid, mille suurus sõltub muude asjaolude muutumise korral välja ja ketta suhteline kiirus .
Lenzi seaduse järgi peab ketas pöörlema välja suunas. Hõõrdumise puudumisel peab ketas omandama magneti kiirusega võrdse nurkkiiruse, mille järel indutseeritud emf kaob. Päriselus on hõõrdumine paratamatult olemas ja ketas muutub aeglasemaks.Selle suurus sõltub ketta mehaanilisest pidurdusmomendist.
Ketta (rootori) pöörlemiskiiruse ja magnetvälja pöörlemiskiiruse lahknevus kajastub mootorite nimetuses.
Asünkroonsete mootorite tööpõhimõte:
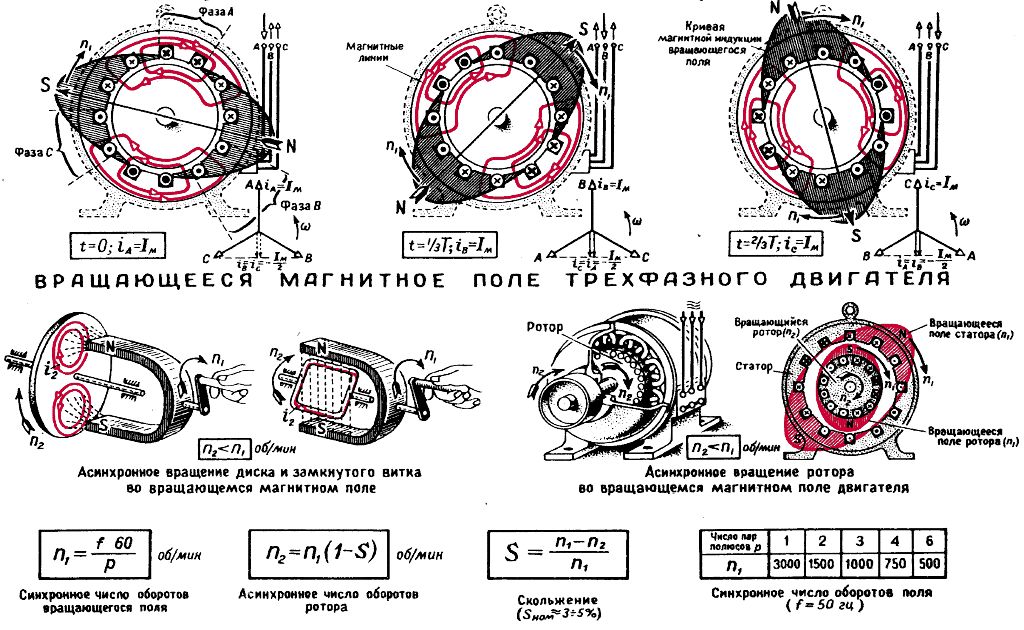
Tehnilistes asünkroonmootorites (enamasti kolmefaasilistes) tekib pöörlev magnetväli mitmefaasiline voolvoolab ümber statsionaarse staatori mähise. Sagedusel kolmefaasiline vool on ja staatoripoolide arv 3p pöörlev väli teeb n = f / p pööret / sek.

Pööratav rootor asub staatori õõnes. Selle võlliga saab ühendada pöörleva mehhanismi.Lihtsamates "oravarakkude" mootorites koosneb rootor pikisuunaliste metallvarraste süsteemist, mis on asetatud terassilindrilise korpuse soontesse. Juhtmed on lühises kahe rõngaga. Pöördemomendi suurendamiseks tehakse rootori raadius piisavalt suureks.
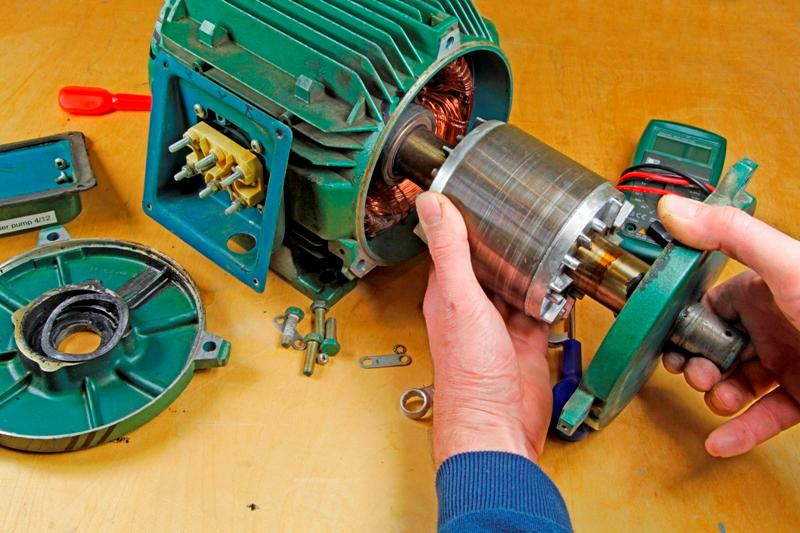
Teistes mootorikonstruktsioonides (tavaliselt suure võimsusega mootorites) moodustavad rootori juhtmed avatud kolmefaasilise mähise. Mähiste otsad lühistatakse rootoris endas ja juhtmed viiakse välja kolmele rootori võllile paigaldatud ja sellest isoleeritud liugrõngale.
Nende rõngastega on libisevate kontaktide (harjade) abil ühendatud kolmefaasiline reostaat, mis käivitab mootori liikumise. Pärast mootori pööramist eemaldatakse reostaat täielikult ja rootor muutub oravapuuriks (vt. Keritud rootoriga asünkroonsed mootorid).

Staatori korpusel on klemmiplaat. Staatori mähised tuuakse neile välja. Neid saab kaasata täht või kolmnurk, olenevalt võrgupingest: esimesel juhul võib võrgupinge olla 1,73 korda kõrgem kui teisel.
Väärtust, mis iseloomustab rootori suhtelist aeglustumist asünkroonmootori staatoriväljaga võrreldes nn. libisemine… See muutub 100% (mootori käivitamise hetkel) nulliks (ideaalne rootori kadudeta liikumise juhtum).
Asünkroonmootori pöörlemissuuna ümberpööramine saavutatakse mootorit varustava elektrivõrgu iga kahe lineaarjuhi vastastikuse ümberlülitamisega.

Oravapuurmootoreid kasutatakse tööstuses laialdaselt. Asünkroonsete mootorite eelised on disaini lihtsus ja libisevate kontaktide puudumine.
Kuni viimase ajani oli selliste mootorite peamiseks puuduseks kiiruse reguleerimise keerukus, sest kui selleks muuta staatori ahela pinget, siis muutub pöördemoment järsult, kuid toitevoolu sagedust oli tehniliselt keeruline muuta. Moodsaid mikroprotsessorseadmeid kasutatakse nüüd laialdaselt toitevoolu sageduse juhtimiseks, et muuta mootorite kiirust. sagedusmuundurid.
Generaatorid
Generaatorid on ehitatud märkimisväärse võimsuse ja kõrge pinge jaoks. Nagu asünkroonsetel masinatel, on neil kaks mähist. Tavaliselt asub armatuuri mähis staatori korpuses. Induktiivpoolid, mis loovad primaarse magnetvoo, on paigaldatud rootorile ja neid toidab erguti - väike alalisvoolu generaator, mis on paigaldatud rootori võllile. Suure võimsusega masinates tekitab ergutus mõnikord alaldatud vahelduvpinge.
Armatuuri mähise liikumatuse tõttu kaovad suure võimsusega liugkontaktide kasutamisega seotud tehnilised raskused.
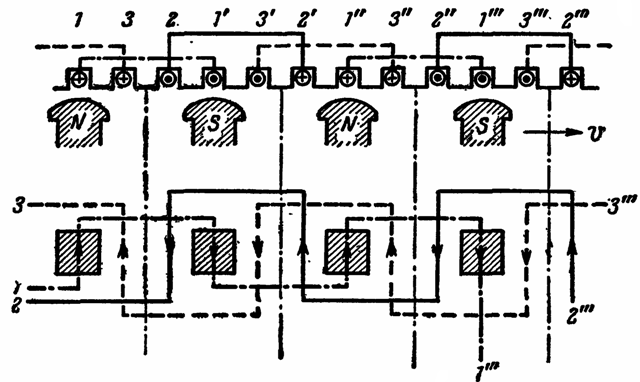
Alloleval joonisel on kujutatud ühefaasilise generaatori skeem. Selle rootoril on kaheksa poolust. Nendel on keritud mähised (joonisel pole näidatud), mida toidetakse välisest allikast rootori võllile paigaldatud libisemisrõngastele juhitava alalisvooluga. Pooluste poolid on keritud nii, et staatori poole suunatud pooluste märgid vahelduvad. Pooluste arv peab olema paaris.
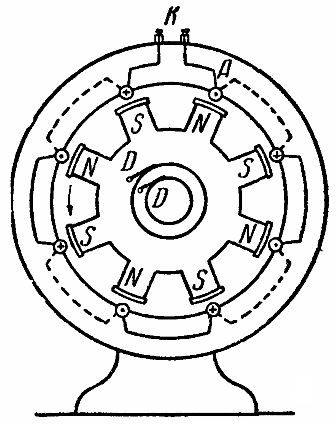
Armatuuri mähis asub staatori korpuses. Selle pikad töötavad "aktiivsed" juhtmed, mis on risti joonise tasapinnaga, on joonisel näidatud ringidega, need ristuvad rootori pöörlemisel magnetinduktsiooni joontega.
Ringid näitavad indutseeritud elektriväljade suundade hetkelist jaotust. Piki staatori esikülge kulgevad ühendusjuhtmed on näidatud pidevate joontega ja tagaküljel katkendlike joontega. K-klambreid kasutatakse välise vooluahela ühendamiseks staatori mähisega. Rootori pöörlemissuund on näidatud noolega.
Kui lõigate masina vaimselt piki raadiust, mis kulgeb klambrite K vahel, ja keerate selle tasapinnaks, siis on skemaatilise joonisega kujutatud staatori mähise ja rootori pooluste (külg ja plaan) suhtelist asendit:
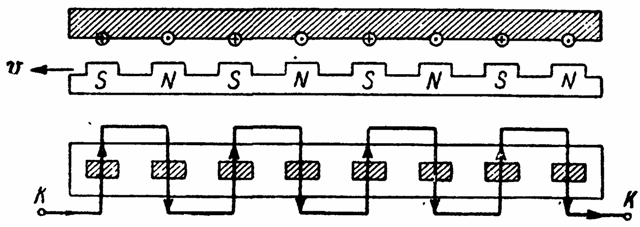
Joonist arvestades veendume, et kõik aktiivsed juhtmed (läbivad induktiivpooli poolused) on omavahel jadamisi ühendatud ja nendes indutseeritud EMF summeeritakse. Kõigi elektromagnetväljade faasid on ilmselgelt samad.Rootori ühe täieliku pöörlemise ajal saadakse igas juhtmes (ja seega ka välisahelas) neli täielikku voolumuutuse perioodi.
Kui elektrimasinal on p poolustepaari ja rootor pöörleb tehes n pööret sekundis, siis on masinale vastuvõetava vahelduvvoolu sagedus f = pn hz.
Kuna EMF-i sagedus võrgus peab olema konstantne, peab rootorite pöörlemiskiirus olema konstantne. Tehnilise sagedusega (50 Hz) EMF-i saamiseks saab kasutada suhteliselt aeglast pöörlemist, kui rootori pooluste arv on piisavalt suur.
Kolmefaasilise voolu saamiseks asetatakse staatori korpusesse kolm eraldi mähist. Igaüks neist on kahe teise suhtes nihutatud kolmandiku võrra induktiivpoolide külgnevate (vastaspoolsete) pooluste vahelisest kaarekaugusest.
Lihtne on kontrollida, et induktiivpoolide pöörlemisel indutseeritakse EMF-id mähistes, mis on faasis (ajas) nihutatud 120 ° võrra. Poolide otsad eemaldatakse masinast ja neid saab ühendada tähe või kolmnurgaga.
Generaatoris määrab välja ja juhi suhtelise kiiruse rootori läbimõõt, rootori pöörete arv sekundis ja pooluste paaride arv.

Kui generaatorit juhib veevool (hüdrogeneraator), tehakse seda tavaliselt aeglaste pööretega. Soovitud voolusageduse saamiseks on vaja suurendada pooluste arvu, mis omakorda eeldab rootori läbimõõdu suurendamist.
Mitmel tehnilisel põhjusel võimsad vesinikugeneraatorid neil on tavaliselt vertikaalne võll ja need asuvad hüdroturbiini kohal, mis põhjustab nende pöörlemise.

Auruturbiiniga töötavad generaatorid – Turbiingeneraatorid on tavaliselt suure kiirusega. Mehaaniliste jõudude vähendamiseks on need väikese läbimõõduga ja vastavalt väikese pooluste arvuga Mitmed tehnilised kaalutlused nõuavad horisontaalvõlliga turbiingeneraatorite tootmist.
Kui generaatorit käitab sisepõlemismootor, nimetatakse seda diiselgeneraatoriks, kuna diiselmootoreid kasutatakse üldiselt odavamat kütust tarbivate mootoritena.

Generaatori pööratavus, sünkroonmootorid
Kui generaatori staatorimähisele rakendatakse välisest allikast vahelduvpinge, siis tekib induktiivpoolide pooluste koostoime staatoris tekkiva voolu magnetväljaga ja mõjuvad samast suunast pöördemomendid. kõigil poolustel.
Kui rootor pöörleb sellisel kiirusel, et veidi pärast poole vahelduvvoolu perioodist mahub induktiivpooli järgmine poolus (esimese pooluse vastaspoolus) staatorimähise vaadeldava juhtme alla, siis staatori mähise vaadeldava juhtme alla mahub vastasmõju jõud selle ja suunda muutnud voolu vahel jääb samaks.
Nendes tingimustes jätkab pöördemomendi pideva mõju all olev rootor liikumist ja suudab juhtida mis tahes mehhanismi. Rootori liikumise takistuse ületamine toimub võrgu tarbitava energia tõttu ja generaatorist saab elektrimootor.

Siiski tuleb märkida, et pidev liikumine on võimalik ainult rangelt määratletud pöörlemiskiirusel, kuna sellest kõrvalekaldumise korral mõjub kiirendusmoment osaliselt rootori mõlemale poolusele, liikudes kahe voolujuhi vahel. staator, osa ajast - peatumine .
Seega tuleb mootori pöörlemiskiirus rangelt kindlaks määrata, — pooluse asendamise aeg järgmisega peab ühtima voolu poolperioodiga, mistõttu selliseid mootoreid nimetatakse nn. sünkroonselt.
Kui statsionaarse rootoriga staatori mähisele rakendatakse vahelduvpinge, siis ehkki voolu esimesel pooltsüklil kogevad rootori kõik poolused sama märgiga pöördemomente, tekib inertsi tõttu siiski rootoril pole aega liikuda. Järgmisel pooltsüklil muutub kõigi rootori pooluste pöördemomentide märk vastupidiseks.
Selle tulemusena hakkab rootor vibreerima, kuid ei saa pöörata. Seetõttu tuleb sünkroonmootor esmalt üles kerida, see tähendab viia normaalse pöörete arvuni ja alles seejärel lülitada staatori mähises olev vool sisse.
Sünkroonmootorite väljatöötamine toimub mehaaniliste meetoditega (madala võimsusega) ja spetsiaalsete elektriseadmetega (suure võimsusega).
Väikeste koormuse muutuste korral muutub mootori kiirus automaatselt, et kohanduda uue koormusega. Seega, kui mootori võlli koormus suureneb, aeglustub rootor kohe. Seetõttu muutub faasinihe liinipinge ja staatori mähises induktiivpooli poolt indutseeritud vastupidise indutseeritud EMF vahel.
Lisaks tekitab armatuuri reaktsioon induktiivpoolide demagnetiseerimise, mistõttu staatori vool suureneb, induktiivpoolid kogevad suurenenud pöördemomenti ja mootor hakkab uuesti sünkroonselt pöörlema, ületades suurenenud koormuse. Sarnane protsess toimub koormuse vähendamisel.
Koormuse järskude kõikumiste korral võib see mootori kohanemisvõime olla ebapiisav, selle kiirus muutub oluliselt, see "langeb sünkroonist välja" ja lõpuks peatub, samal ajal kui staatoris indutseeritud induktsioon-EMF kaob ja vool selles suureneb. teravalt. Seetõttu tuleb vältida koormuse järske kõikumisi. Mootori seiskamiseks tuleb ilmselgelt kõigepealt lahti ühendada staatori vooluring ja seejärel õhuklapid lahti ühendada; mootori käivitamisel peate järgima vastupidist toimingute järjekorda.
Sünkroonmootoreid kasutatakse kõige sagedamini konstantsel kiirusel töötavate mehhanismide juhtimiseks. Siin on sünkroonmootorite eelised ja puudused ning nende käivitamise meetodid: Sünkroonmootorid ja nende rakendused
Õppefilmi riba - "Sünkroonmootorid", mis on loodud õppe-visuaalsete vahendite tehase poolt 1966. aastal. Seda saad vaadata siit: Filmiriba «Sünkroonmootor»
