Sünkroonmasinad — mootorid, generaatorid ja kompensaatorid
 Sünkroonmasinad on vahelduvvooluga elektrimasinad, milles rootor ja staatori voolude magnetväli pöörlevad sünkroonselt.
Sünkroonmasinad on vahelduvvooluga elektrimasinad, milles rootor ja staatori voolude magnetväli pöörlevad sünkroonselt.
Kolmefaasilised sünkroongeneraatorid on kõige võimsamad elektrimasinad. Hüdroelektrijaamade sünkroongeneraatorite ühikvõimsus on 640 MW ja soojuselektrijaamades 8-1200 MW. Sünkroonmasinas on üks mähistest ühendatud vahelduvvooluvõrku ja teine ergastatakse alalisvooluga. Vahelduvvoolu mähist nimetatakse armatuuri mähiseks.
Armatuurimähis muudab kogu sünkroonmasina elektromagnetilise võimsuse elektrienergiaks ja vastupidi. Seetõttu asetatakse see tavaliselt staatorile, mida nimetatakse armatuuriks. Ergastusmähis tarbib 0,3 - 2% teisendatavast võimsusest, seetõttu asub see tavaliselt pöörleval rootoril, mida nimetatakse induktiivpooliks, ja madalat ergutusvõimsust annavad libisemisrõngad või kontaktivabad ergutusseadmed.
 Armatuuri magnetväli pöörleb sünkroonse kiirusega n1 = 60f1 / p, rpm, kus p = 1,2,3 … 64 jne. on pooluste paaride arv.
Armatuuri magnetväli pöörleb sünkroonse kiirusega n1 = 60f1 / p, rpm, kus p = 1,2,3 … 64 jne. on pooluste paaride arv.
Tööstusvõrgu sagedusega f1 = 50 Hz, mitmed sünkroonsed kiirused erineva arvu pooluste juures: 3000, 1500, 1000 jne). Kuna induktiivpooli magnetväli on rootori suhtes paigal, peab induktiivpooli ja armatuuri väljade pidevaks koostoimeks rootor pöörlema sama sünkroonse kiirusega.
 Sünkroonmasinate ehitus
Sünkroonmasinate ehitus
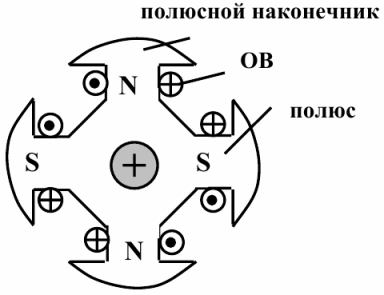
Kolmefaasilise mähisega sünkroonmasina staator ei erine ehituselt asünkroonse masina staator, ja põneva mähisega rootorit on kahte tüüpi – silmapaistev poolus ja kaudne poolus. Suurel kiirusel ja vähesel pooluste arvul kasutatakse implicit-pooluse rootoreid, kuna neil on vastupidavam struktuur, ning madalatel kiirustel ja suurel hulgal poolustel kasutatakse modulaarse konstruktsiooniga väljaulatuva poolusega rootoreid. Selliste rootorite tugevus on väiksem, kuid neid on lihtsam valmistada ja parandada. Näiv poolusrootor:
 Neid kasutatakse suure pooluste arvu ja vastavalt madala n-ga sünkroonmasinates. Hüdroelektrijaamad (hüdrogeneraatorid). sagedus n 60 kuni mitusada pööret minutis. Kõige võimsamate hüdrogeneraatorite rootori läbimõõt on 12 m pikkusega 2,5 m, p — 42 ja n = 143 p/min.
Neid kasutatakse suure pooluste arvu ja vastavalt madala n-ga sünkroonmasinates. Hüdroelektrijaamad (hüdrogeneraatorid). sagedus n 60 kuni mitusada pööret minutis. Kõige võimsamate hüdrogeneraatorite rootori läbimõõt on 12 m pikkusega 2,5 m, p — 42 ja n = 143 p/min.
Kaudne rootor:
 Mähis — läbimõõt d = 1,2 — 1,3 m rootorikanalites, rootori aktiivne pikkus mitte üle 6,5 m TPP, NPP (turbiingeneraatorid). S = 500 000 kVA ühes masinas n = 3000 või 1500 p/min (1 või 2 pooluste paari).
Mähis — läbimõõt d = 1,2 — 1,3 m rootorikanalites, rootori aktiivne pikkus mitte üle 6,5 m TPP, NPP (turbiingeneraatorid). S = 500 000 kVA ühes masinas n = 3000 või 1500 p/min (1 või 2 pooluste paari).
Lisaks väljamähisele asub rootoril siiber ehk summutusmähis, mida kasutatakse sünkroonmootorites käivitamiseks. See mähis on valmistatud sarnaselt oravapuuri lühismähisele, ainult palju väiksema osaga, kuna väljamähis võtab enda alla rootori põhimahu.Ebaühtlase poolusega rootorites täidavad siibri mähise rolli rootori tahkete hammaste pinnad ja kanalites olevad juhtivad kiilud.
Sünkroonmasina ergutusmähises oleva alalisvoolu saab anda spetsiaalsest alalisvoolu generaatorist, mis on paigaldatud masina võllile ja mida nimetatakse ergutiks, või võrgust läbi pooljuhtalaldi.  Vaata ka sellel teemal:
Vaata ka sellel teemal:
Sünkroonmasinate otstarve ja paigutus
Kuidas sünkroonsed turbod ja hüdrogeneraatorid töötavad
Sünkroonmasin võib töötada generaatori või mootorina. Sünkroonmasin võib töötada mootorina, kui staatori mähisele antakse kolmefaasiline võrguvool. Sel juhul kannab staatori ja rootori magnetvälja vastasmõju tulemusena staatoriväli rootori endaga kaasa. Sel juhul pöörleb rootor staatoriväljaga samas suunas ja sama kiirusega.

Kõige levinum on sünkroonmasinate generaatortöörežiim ja peaaegu kogu elektrienergia toodetakse sünkroongeneraatoritega.Sünkroonmootoreid kasutatakse võimsusega üle 600 kW ja kuni 1 kW mikromootoritena. Autonoomsete toitesüsteemide seadmetes kasutatakse sünkroongeneraatoreid pingele kuni 1000 V.
Nende generaatoritega üksused võivad olla statsionaarsed ja mobiilsed. Enamikku seadmeid kasutatakse diiselmootoritega, kuid neid saab kasutada gaasiturbiinide, elektrimootorite ja bensiinimootoritega.
Sünkroonmootor erineb sünkroongeneraatorist vaid käivitussummutusmähise poolest, mis peaks tagama mootori head käivitusomadused.
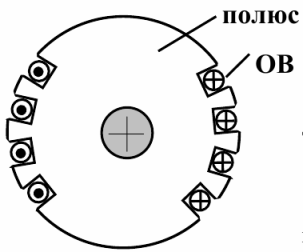
Kuuepooluselise sünkroongeneraatori skeem.Näidatud on ühe faasi mähiste ristlõiked (kolm järjestikku ühendatud mähist). Ülejäänud kahe faasi mähised sobivad joonisel näidatud vabadesse piludesse. Faasid on ühendatud tähe või kolmnurgaga.
Generaatori režiim: mootor (turbiin) pöörleb rootorit, mille mähis on varustatud pideva pingega? on vool, mis loob püsiva magnetvälja. Magnetväli pöörleb koos rootoriga, ületab staatori mähiseid ja indutseerib sama suuruse ja sagedusega, kuid 1200 võrra nihutatud elektromagnetvälja (sümmeetriline kolmefaasiline süsteem).
Mootori režiim: staatori mähis on ühendatud kolmefaasilise võrguga ja rootori mähis alalisvooluallikaga. Masina pöörleva magnetvälja koosmõjul ergutuspooli alalisvooluga tekib pöördemoment Mvr, mis paneb rootori magnetvälja kiirusel pöörlema.
Sünkroonmootori mehaaniline omadus — sõltuvus n (M) — on horisontaallõige.
Õppefilmiriba – 1966. aastal õppematerjalide tehases toodetud "Sünkroonmootorid".
Seda saad vaadata siit: Filmiriba «Sünkroonmootor»
 Sünkroonmootorite kasutamine Olulise alakoormusega asünkroonmootorite massiline kasutamine raskendab elektrisüsteemide ja -jaamade tööd: süsteemis väheneb võimsustegur, mis toob kaasa lisakadusid kõikides seadmetes ja liinides ning nende ebapiisava kasutamise aktiivvõimsuse tingimused. Seetõttu muutus vajalikuks sünkroonmootorite kasutamine, eriti võimsate ajamiga mehhanismide puhul.
Sünkroonmootorite kasutamine Olulise alakoormusega asünkroonmootorite massiline kasutamine raskendab elektrisüsteemide ja -jaamade tööd: süsteemis väheneb võimsustegur, mis toob kaasa lisakadusid kõikides seadmetes ja liinides ning nende ebapiisava kasutamise aktiivvõimsuse tingimused. Seetõttu muutus vajalikuks sünkroonmootorite kasutamine, eriti võimsate ajamiga mehhanismide puhul.
Sünkroonmootoritel on asünkroonmootorite ees suur eelis, mis seisneb selles, et tänu alalisvoolu ergutusele saavad nad töötada koos cosphi = 1-ga ja ei tarbi võrgu reaktiivvõimsust ning töötamise ajal annavad nad üleergastuse korral isegi reaktiivvõimsust. võrku. Tänu sellele paraneb võrgu võimsustegur ja väheneb pingelangus ja kaod selles, samuti elektrijaamades töötavate generaatorite võimsustegur.
Sünkroonmootori maksimaalne pöördemoment on võrdeline U-ga ja asünkroonmootori puhul U2.
Seetõttu säilitab sünkroonmootor pinge langedes suurema kandevõime. Lisaks võimaldab sünkroonmootorite ergutusvoolu suurendamise võimaluse kasutamine tõsta nende töökindlust võrgu avariipingelanguste korral ning parandada nendel juhtudel elektrisüsteemi kui terviku töötingimusi. Tänu õhupilu suuremale suurusele on lisakaod terases ja sünkroonmootorite rootori puuris väiksemad kui asünkroonmootoritel, seetõttu on sünkroonmootorite kasutegur tavaliselt suurem.
Teisalt on sünkroonmootorite ehitus keerulisem kui oravpuuriga asünkroonmootoritel ja lisaks peab sünkroonmootoritel olema erguti või muu seade alalisvoolu mähise toiteks. Seetõttu on sünkroonmootorid enamikul juhtudel kallimad kui asünkroonsed oravapuuriga mootorid.
Sünkroonmootorite töötamise ajal tekkis nende käivitamisel märkimisväärseid raskusi.Need raskused on juba ületatud.

Keerulisem on ka sünkroonmootorite käivitamine ja kiiruse reguleerimine. Sünkroonmootorite eelis on aga nii suur, et suurte võimsuste juures on soovitav neid kasutada kõikjal, kus pole vaja sagedasi käivitamisi ja seiskamisi ning kiiruse reguleerimist (mootorigeneraatorid, võimsad pumbad, ventilaatorid, kompressorid, veskid, purustid jne). ).
Vaata ka:
Tüüpilised sünkroonmootorite käivitamise skeemid
Sünkroonmootorite elektromehaanilised omadused
Sünkroonsed kompensaatorid
Sünkroonkompensaatorid on mõeldud võrgu võimsusteguri kompenseerimiseks ja võrgu normaalse pingetaseme säilitamiseks piirkondades, kus tarbijate koormused on koondunud. Sünkroonkompensaatori üleergastatud töörežiim on normaalne, kui see varustab võrku reaktiivvõimsusega.
Sellega seoses nimetatakse tarbijaalajaamadesse paigaldatud kompensaatoreid ja sama otstarbega kondensaatoripankasid ka reaktiivenergia generaatoriteks. Vähenenud kasutajakoormuse perioodidel (näiteks öösel) on aga sageli vaja kasutada sünkroonkompensaatoreid ja alaergutusrežiimis, kui need tarbivad võrgust induktiivvoolu ja reaktiivvõimsust, kuna sellistel juhtudel kipub võrgu pinge langema. suureneda ja selle normaalsel tasemel hoidmiseks on vaja võrku koormata induktiivvooludega, mis põhjustavad selles täiendavaid pingelangusi.
Selleks on iga sünkroonkompensaator varustatud automaatse ergutus- ehk pingeregulaatoriga, mis reguleerib ergutusvoolu suurust nii, et pinge kompensaatori klemmidel püsib konstantsena.