Vahelduvvoolu elektrimasinate staatori- ja rootorimähised
Elektritoote (seadme) mähis — kindlal viisil paiknev ja ühendatud poolide või poolide kogum, mis on ette nähtud magnetvälja tekitamiseks või kasutamiseks või elektritoote (seadme) etteantud takistuse väärtuse saamiseks Mähismähis elektritoote (seadme) - eraldi struktuuriüksusena valmistatud elektritoote (seadme) või selle osa mähis (GOST 18311-80).
Artiklis räägitakse vahelduvvooluga elektrimasinate staatori ja rootori mähiste seadmest.
Staatori mähiste ruumiline paigutus:
 Orava puuri rootor:
Orava puuri rootor:
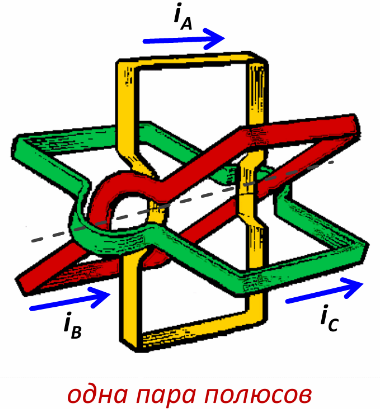
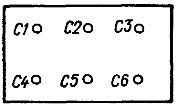
Kaheteistkümne piluga staator, millest igasse on paigaldatud üks traat, on skemaatiliselt näidatud joonisel fig. 1, a. Keerutatud juhtide vahelised ühendused on näidatud ainult ühe kolme faasi jaoks; pooli faaside A, B, C algus on tähistatud C1, C2, C3; otsad - C4, C5, C6.Kanalitesse paigutatud mähise osad (mähise aktiivne osa) on tavapäraselt kujutatud varraste kujul ja juhtmete ühendused soontes (otsaühendused) on kujutatud pideva joonena.
Staatori südamik on õõnsa silindri kujuga, mis on elektriterasest lehtedest valmistatud virna või virnade jada (eraldatud ventilatsioonikanalitega). Väikestel ja keskmise suurusega masinatel tembeldatakse iga leht rõnga kujul, mille sisemisel ümbermõõdul on sooned. Joonisel fig. 1, b on toodud ühe kasutatud vormi soontega staatorileht.
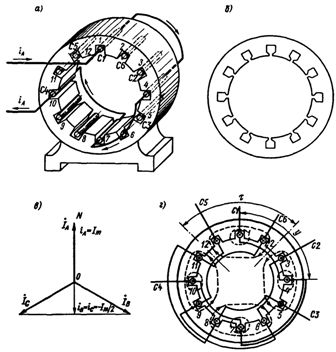
Riis. 1. Mähise asukoht staatori piludes ja voolude jaotus juhtmetes
Olgu esimese faasi voolu iA hetkväärtus teatud ajahetkel maksimaalne ja vool on suunatud faasi C1 algusest selle lõppu C4. Peame seda voolu positiivseks.
Määrates hetkevoolud faasides pöörlevate vektorite projektsioonina fikseeritud teljele ON (joon. 1, c), saame, et faaside B ja C voolud on antud hetkel negatiivsed, st on suunatud faaside lõpust alguseni.
Jälgime seda joonisel fig. 1d pöörleva magnetvälja teke. Antud hetkel on faasi A vool suunatud algusest lõpuni ehk kui juhtmetes 1 ja 7 jätab see meid väljapoole joonise tasapinda, siis juhtmetes 4 ja 10 läheb see tasapinna taha. meile (vt joonis 1, a ja d).
B-faasis liigub vool sellel ajahetkel faasi lõpust selle algusesse.Ühendades teise faasi juhtmed vastavalt esimese näidisele, on võimalik saada, et faasi B vool läbib juhtmeid 12, 9, 6, 3; samal ajal jätab vool meid juhtmete 12 ja 6 kaudu väljapoole joonise tasapinda ning juhtmete 9 ja 3 kaudu - meile. Faasi C näidist kasutades saame pildi voolude jaotusest faasis C.
Voolude suunad on toodud joonisel fig. 1, d; katkendlikud jooned näitavad staatori voolude tekitatud magnetvälja jooni; joonte suunad määratakse parempoolse kruvireegliga. Jooniselt on näha, et juhtmed moodustavad neli sama voolusuunaga rühma ja magnetsüsteemi 2p pooluste arv on neli. Staatori piirkonnad, kus magnetjooned staatorist väljuvad, on põhjapoolused ja piirkonnad, kus magnetjooned staatorisse sisenevad, on lõunapoolused. Ühe pooluse poolt hõivatud staatoriringi kaare nimetatakse pooluste eraldumiseks.
Magnetväli staatori ümbermõõdu erinevates punktides on erinev. Magnetvälja jaotuse muster piki staatori ümbermõõtu korratakse perioodiliselt läbi iga kahepooluselise eraldusjoone. Kaarenurk 2 on võetud 360 elektrikraadina. Kuna staatori ümbermõõdul on p kahepooluselist jaotust, võrdub 360 geomeetrilist kraadi 360 p elektrikraadiga ja üks geomeetriline kraad võrdub p elektrikraadiga.
Joonisel fig. 1d näitab magnetilisi jooni teatud kindlal ajahetkel. Kui vaatame magnetvälja pilti mitut järjestikust ajahetke, saame veenduda, et väli pöörleb ühtlase kiirusega.
Leiame välja pöörlemiskiiruse.Pärast aja möödumist, mis on võrdne poole vahelduvvoolu perioodist, muutuvad kõigi voolude suunad vastupidiseks, mille tõttu magnetpoolused on vastupidised, see tähendab, et poole perioodi jooksul pöörleb magnetväli murdosa pöörde võrra. Staatori magnetvälja pöörlemiskiirus, st sünkroonkiirus, on (pööret minutis)

Pooluspaaride arv p võib olla ainult täisarv, seetõttu võib sagedusel näiteks 50 Hz sünkroonkiirus olla võrdne 3000-ga; 1500; 1000 p/min jne.
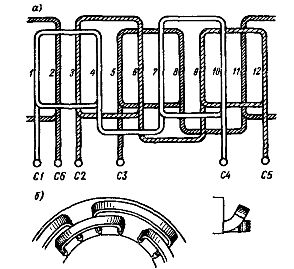
Riis. 2. Kolmefaasilise ühekihilise mähise üksikasjalik skeem
Vahelduvvoolumasina mähised võib jagada kolme rühma:
1) rull rullile;
2) tuum;
3) eriline;
Spetsiaalsed mähised hõlmavad järgmist:
a) lühis oravapuuri kujul;
b) asünkroonse mootori mähis koos ümberlülitamisega erinevale arvule poolustele;
c) asünkroonmootori mähis koos antiühendustega jne.
Lisaks ülaltoodud jaotusele erinevad mähised mitmete muude omaduste poolest, nimelt:
1) teostuse olemuse järgi — käsitsi, mustriline ja poolmustriline;
2) asukoha järgi soones - ühekihiline ja kahekihiline;
3) pilude arvu järgi pooluse ja faasi kohta — mähised täisarvuga q pilud pooluse ja faasi kohta ning mähised murdarvuga q.
Mähis on vooluahel, mis koosneb kahest järjestikku ühendatud juhtmest. Sektsioon ehk mähis on järjestikku ühendatud keerdude jada, mis paiknevad kahes pilus ja on korpusest ühise isolatsiooniga.
Sektsioonil on kaks aktiivset külge. Vasakut aktiivset poolt nimetatakse sektsiooni alguseks (mähis) ja paremat poolt sektsiooni lõpuks. Lõigu aktiivsete külgede vahelist kaugust nimetatakse lõigu sammuks. Seda saab mõõta kas harude arvu või pooluste jaotuse osade järgi.
Lõigu sammu nimetatakse diametraalseks, kui see on võrdne pooluste jaotusega, ja kärbitud, kui see on pooluste jaotusest väiksem, kuna lõigu samm ei ole suurem pooluste jaotusest.
Iseloomulik suurus, mis määrab mähise töö, on pilude arv pooluse ja faasi kohta, s.o. iga faasi mähise poolt hõivatud pilude arv ühes pooluste jaotuses:

kus z on staatoripilude arv.
Joonisel fig. 1, a, on järgmised andmed:

Isegi selle kõige lihtsama mähise puhul osutub juhtmete ja nende ühenduste ruumiline joonistamine keeruliseks, seetõttu asendatakse see tavaliselt laiendatud diagrammiga, kus mähise juhtmed on kujutatud mitte silindrilisel pinnal, vaid tasapinnal (silindriline pind soontega ja mähis "lahti" tasapinnal). Joonisel fig. 2 on vaadeldava staatori mähise üksikasjalik skeem.
Eelmisel joonisel näidati lihtsuse huvides, et osa piludesse 1 ja 4 paigutatud mähise faasist A koosneb ainult kahest juhtmest, see tähendab ühest pöördest. Tegelikult koosneb iga selline ühele poolusele langev mähise osa w pöördest, see tähendab, et igasse soonepaari asetatakse w juhtmed, mis on ühendatud üheks mähiseks. Seetõttu tuleb laiendatud skeemi järgi möödasõidul, näiteks pilu 1 faasist A, enne pilusse 7 liikumist mööda minna pilud 1 ja 4 w korda. Ühe mähise või mähise sammu pöörde külgede vaheline kaugus , y on näidatud joonisel fig. 1, d; tavaliselt väljendatakse kanalite arvuna.
Riis. 3. Asünkroonse masina kilp
Joonisel fig.1 ja 2 nimetatakse staatori mähist ühekihiliseks, kuna see mahub igasse soonde ühe kihina.Listuvate esiosade tasapinnale paigutamiseks painutatakse need erinevatele pindadele (joon. 2, b). Ühekihilised mähised tehakse astmega, mis on võrdne pooluste eraldamisega (joonis 2, a), või see samm on keskmiselt võrdne pooluste eraldamisega sama faasi erinevate mähiste jaoks, kui y> 1, y< 1... Tänapäeval on kahekihilised poolid enam levinud.
Kõigi mähise kolme faasi algus ja lõpp on näidatud masina paneelil, kus on kuus klambrit (joonis 3). Kolmefaasilise võrgu kolm lineaarset juhtmest on ühendatud ülemiste klemmidega C1, C2, SZ (faaside algus). Alumised klambrid C4, C5, C6 (faaside otsad) on kas ühendatud kahe horisontaalse hüppajaga ühte punkti või kõik need klambrid on ühendatud vertikaalse hüppajaga, mille ülemine klamber asub selle kohal.
Esimesel juhul moodustavad staatori kolm faasi täheühenduse, teises - kolmnurkühendus. Kui näiteks staatori üks faas on projekteeritud pingele 220 V, siis võrgu liinipinge, millega mootor on ühendatud, peab olema 220 V, kui staator on ühendatud kolmnurgaga; tähega ühendamisel peaks võrguliini pinge olema
Kui staator on tärniga ühendatud, ei võeta nulljuhtmele pinget, kuna mootor on võrgule sümmeetriline koormus.
Induktsioonmasina rootor on valmistatud isoleeritud elektriterasest stantsitud lehtedest võllile või spetsiaalsele kandekonstruktsioonile. Radiaalne kliirens staatori ja rootori vahel on võimalikult väike, et tagada madal takistus masina mõlemasse osasse tungiva magnetvoo teel.
Väikseim tehnoloogiliste nõuetega lubatud vahe on olenevalt masina võimsusest ja mõõtmetest kümnendikmillimeetrist mitme millimeetrini. Rootori mähise juhid paiknevad otse selle pinnale moodustuvates piludes piki rootorit, et tagada rootori mähise suurim kontakt pöörleva väljaga.
Induktsioonmasinaid toodetakse nii faasi- kui ka oravapuuriga rootoritega.

Riis. 4. Faasirootor
Faasirootoril on tavaliselt kolmefaasiline mähis, mis on valmistatud nagu staatori mähis, sama arvu poolustega. Mähis on ühendatud tähe või kolmnurgaga; pooli kolm otsa juhitakse kolme isoleeritud liugrõngani, mis pöörlevad koos masina võlliga. Masina statsionaarsele osale paigaldatud ja libisemisrõngastel libisevate harjade kaudu ühendatakse rootoriga kolmefaasiline käivitus- või reguleerimisreostaat, st igasse rootori faasi juhitakse aktiivne takistus. Faasirootori välisvaade on näidatud joonisel fig. 4, võlli vasakpoolses otsas on näha kolm libisemisrõngast. Keritud rootoriga asünkroonseid mootoreid kasutatakse seal, kus on vajalik ajammehhanismi kiiruse sujuv reguleerimine, samuti mootori sagedasel käivitamisel koormuse all.
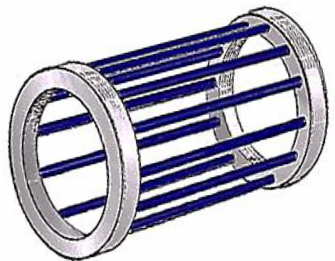
Oravapuurirootori konstruktsioon on palju lihtsam kui faasirootori oma. Ühe joonisel fig. 5a on kujutatud lehtede kuju, millest rootori südamik on kokku pandud. Sel juhul moodustavad iga lehe välimise ümbermõõdu lähedal olevad augud südamikus pikisuunalised kanalid. Nendesse kanalitesse valatakse alumiinium, pärast selle tahkumist moodustuvad rootoris pikisuunalised juhtivad vardad.Rootori mõlemasse otsa valatakse samaaegselt alumiiniumrõngad, mis lühistavad alumiiniumvardad. Saadud juhtivat süsteemi nimetatakse tavaliselt oravarakuks.

Riis. 5. Oravaelemendi rootor
Puurirootor on näidatud joonisel fig. 5 B. Rootori otstes on näha ventilatsioonilabad, mis on valatud üheaegselt lühikeste ühendusrõngastega. Sellisel juhul on pilud piki rootorit ühe jaotusega kaldu. Oravapuur on lihtne, puuduvad libisevad kontaktid, seetõttu on kolmefaasilised asünkroonsed oravapuurmootorid kõige odavamad, lihtsamad ja töökindlamad; need on kõige levinumad.