Elektrivõll ja selle rakendamine metallilõikuspinkide elektriajamis
 Artiklis käsitletakse seadet, tööpõhimõtet ja näiteid sünkroonse pöörlemise elektrisüsteemide (elektrivõlli) kasutamisest metallilõikeseadmetes ja -paigaldistes.
Artiklis käsitletakse seadet, tööpõhimõtet ja näiteid sünkroonse pöörlemise elektrisüsteemide (elektrivõlli) kasutamisest metallilõikeseadmetes ja -paigaldistes.
Oletame, et kaks võlli, mis ei ole üksteisega mehaaniliselt ühendatud, peavad pöörlema sama kiirusega, ilma üksteise suhtes pöörlemata. Sellise sünkroonse ja faasilise pöörlemise tagamiseks mootoritega D1 ja D2, mis pööravad vastavalt võlli A ja II (joon. 1), ühendage faasirootoritega asünkroonsed abimasinad A1 ja A2. Nende masinate rootorimähised on omavahel ühendatud.
Kui kahe masina pöörlemiskiirused ja nende rootorite asendid on samad, siis on masinate A1 ja A2 rootorite mähistes indutseeritud elektromotoorjõud võrdsed ja suunatud üksteise poole (joon. 2, a), ning vool ei liigu rootori ahelas.
Oletame, et abimasinate välja pöörlemissuund langeb kokku nende rootorite pöörlemissuunaga.Kuna masina A2 pöörlemine aeglustub, jääb selle rootor A1 omast maha, mille tulemuseks on e. jne. c) Rootori mähises indutseeritud Ep2 nihkub faasis edasi (joonis 2, b) ja masinate A1 ja A2 rootoriahelas vektori summa e toimel. jne. E-ga ilmub tasandusvool Az.
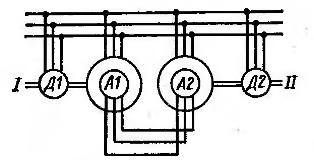
Riis. 1. Sünkroonse suhtluse skeem
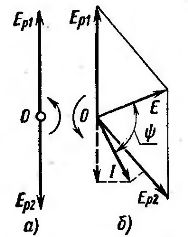
Riis. 2. Sünkroonse sidesüsteemi vektorskeemid
Praegune vektor I jääb vektorist e maha. jne. E-ga nurgas φ... Vooluvektori projektsioon Az vektorile e jne. v. Ep2 kattub selle suunavektoriga. Vooluvektori projektsioon vektorile e. jne. lk Ep1 on suunatud talle. Sellest järeldub, et masin A2 töötab mootorirežiimis ja masin A1 generaatori režiimis. Sel juhul masina A2 võlli kiirendatakse ja masina A1 võlli aeglustatakse. Sel viisil arendavad masinad pöördemomente, mis taastavad võllide sünkroonse pöörlemise. I ja II ning masinate A1 ja A2 rootorite eelnev koordineeritud asend ruumis. Nende masinate rootorid võivad pöörata nii põllu pöörlemissuunas kui ka vastupidises suunas.
Seda süsteemi nimetatakse elektriliseks sünkroonpöörlemissüsteemiks… Seda nimetatakse ka elektrivõlliks… Sünkroonpöörlemissüsteem võib asendada näiteks kruvilõiketreipingi juhtkruvisid.
Kuna metallilõikamismasinate etteandeahelad tarbivad võrreldes põhiliikumise ahelatega tavaliselt vähe voolu, saab põhiliikumise etteandega sünkroniseerimiseks kasutada lihtsamat sünkroonse pöörlemise skeemi (joonis 3).Sel juhul on vältimatu pidev ebakõla masinate A1 ja A2 rootorite asendi vahel, ilma milleta ei oleks masina A2 rootori vooluringis voolu ja see ei suudaks ületada masina takistusjõudude momenti. toiteahel. Kuna A2 masin saab toite staatorilt ja rootorilt, vajab see elektrivõlli süsteem kuuejuhtmelist ühendust mootoriga, mis paigaldatakse paljudel juhtudel liikuvale masinaplokile, mis on tavaliselt näidatud punktiirjoonega joonisel.
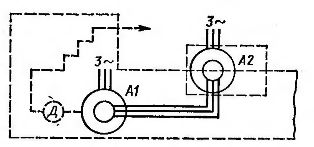
Riis. 3. Raske kruvitreipingi sünkroonsed sidesüsteemid
Nurgahälbe piires, mis ei ületa 90 °, suureneb elektriline sünkroniseerimismoment. Märkimisväärse sünkroniseerimismomendi tagamiseks peavad sünkroonsed sidemasinad kõigil võimalikel pöördenurkadel töötama suurte libisemistega (mitte vähem kui 0,3–0,5). Seetõttu peavad need masinad olema piisavalt suured, et vältida lubamatut kuumenemist.
Masinate võimsust suurendatakse veelgi, püüdes kõrvaldada koormuse kõikumiste ja hõõrdejõudude mõju. Kasutatakse ka mehaanilisi jõuülekandeid, mis vähendavad masina võllide pöörlemissagedust ja vastavalt ka nurgavea suurust masina võllile Enne elektrivõlli töö alustamist ühendatakse asünkroonmasinad A1 ja A2 ühefaasiline toiteallikas. Sel juhul võtab masina A2 rootor oma algasendi, mis vastab masina A1 rootori asendile.
Raskmetallide lõikamismasinate jaoks kasutatakse ratsionaalselt sünkroonseid pöörlemissüsteeme, kuna pikkade juhtkruvide tootmine on seotud märkimisväärsete raskustega.Lisaks väheneb kruvide või võllide pikkuse suurenedes nende keerdumise tõttu masinaosade vastastikuse paigutuse koordineerimise täpsus. Elektrivõllisüsteemis ei saa võllide vaheline kaugus mõjutada töö täpsust.
Elektrivõlli kasutamisel kaovad pidurisadulate mehaanilised ühendused spindliga ja kinemaatiline diagramm on oluliselt lihtsustatud. Raskemetallide lõikemasinate elektrivõllisüsteemide oluliseks puuduseks on kalli detaili kahjustamise võimalus elektrikatkestuse ajal, kuna kohe tekib vale joondumine. Mõnel juhul saab sellise õnnetuse korral töödeldava detaili kahjustamist vältida tööriista kiire automaatse tagasitõmbamisega.
Kahe identse faasirootoriga asünkroonmootoriga skeem pakub huvi masinaehituse jaoks (joonis 4). Kuna mõlema rootori ahel on reostaadile R suletud, siis mootorite vahelduvvooluvõrku ühendamisel hakkavad mõlemad rootorid pöörlema.
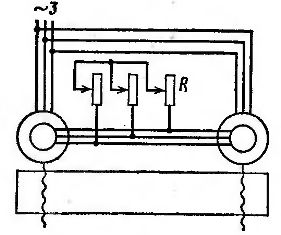
Riis. 4. Pöörleva reostaadiga sünkroonse side skeem
Lisaks rootori ja reostaadi mähistes voolavatele vooludele voolab mõlema masina rootori vooluringis võrdsustav vool. Selle voolu olemasolu põhjustab sünkroniseeriva pöördemomendi ilmnemise, mille tulemusena masinad pöörlevad sünkroonselt. Selle süsteemiga saab tõsta ja langetada suurte höövlite, ruuterite ja karussellide risttalasid.
Tänu elektrivõllisüsteemile on lahendatud tootmiskompleksi kuuluvate konveierite koordineeritud liikumise probleem.Kõige praktilisem rakendus on sel juhul saadud ühise sagedusmuunduriga mootorite sünkroonse pöörlemise variandist.
Lisaks masinaehituses kasutatavatele elektrivõllisüsteemidele on välja töötatud ja kasutatud ka teisi vahelduvvoolu masinasüsteeme, sealhulgas ühefaasilisi süsteeme ja erikonstruktsiooniga sünkroonmootoritega süsteeme.