Piduri elektromagnetite ja elektrohüdrauliliste tõukurite remont
 Piduri elektromagneteid kasutatakse laialdaselt enamiku juhtivate tööstusharude ettevõtetes ja transpordis. Need on mõeldud mehhanismide kiireks peatamiseks, tõstetud koorma usaldusväärseks hoidmiseks, mehhanismide seiskamisaja lühendamiseks ning neid kasutatakse sildkraanates, kaubaliftides, kaevandustõstukites jne.
Piduri elektromagneteid kasutatakse laialdaselt enamiku juhtivate tööstusharude ettevõtetes ja transpordis. Need on mõeldud mehhanismide kiireks peatamiseks, tõstetud koorma usaldusväärseks hoidmiseks, mehhanismide seiskamisaja lühendamiseks ning neid kasutatakse sildkraanates, kaubaliftides, kaevandustõstukites jne.
Pidurisolenoide on palju, sealhulgas lühikese ja pika käiguga, ühefaasilised ja kolmefaasilised alalis- ja vahelduvvoolu pidurisolenoidid.
Sõltumata käigu suurusest, faasist ja voolu tüübist on pidurielektromagnetitel sisuliselt sama seade, mis erinevad üksteisest peamiselt üksikute osade ehituse poolest, mille määrab elektromagneti otstarve ja roll mehhanismi juhtimises. skeem.
Lühitaktiline ühefaasiline pidurielektromagnet (joonis 1, a) koosneb mähisest, mis on paralleelselt ühendatud elektrimootori staatorimähisega, ja hoobade süsteemist.Piduri elektromagneti 5 mähis 6 on reeglina valmistatud traadist emailiga või emailiga ja täiendava puuvillase isolatsiooniga.
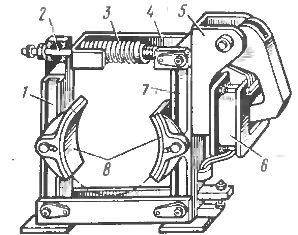
Riis. 1. Piduri elektromagneti seade: 1,7 — hoovad, 2 — juuksenõel, 3 — vedru, 4 — kronstein, 5 — elektromagnet, 6 — mähis, 8 — piduriklotsid
Kui piduri elektromagnet vabastatakse paralleelselt ühendatud mähisega, kustutatakse akumuleeritud magnetvälja energia tühjendustakisti abil. Pidurisolenoid sisaldub mehhanismi juhtimissüsteemis, nii et mähis tühjendatakse ja solenoidi pidurdamine toimub samaaegselt vastava elektrimootori seiskamisega.
Elektrimootori väljalülitamise hetkel lülitatakse samal ajal välja ka elektromagneti mähis b. Elektromagneti armatuur, langedes, lakkab hoidmast pingutatud vedrut, mis kokkusurumisel mõjub kangidele 1 ja 7. Viies hoovad kokku neile paigaldatud patjadega 8, pingutab armatuur patjade vahel asuvat seibi ja seega peatub. , summutab elektrimootori pöörlemisinertsi või mehhanismi liikumist.
Perioodiline ülevaatus ja remont piduri solenoidid ja elektrohüdraulilised tõukurid teostatakse samaaegselt kraanapidurite mehaanilise osa ülevaatuse ja remondiga.
Nende toimingute sagedus sõltub kraanamehhanismide töörežiimist: suurte koormuste korral tehakse neid sagedamini (igapäevane kontroll, kontroll ja reguleerimine), väikese koormusega - harvemini.
Piduri elektromagneti kõige tüüpilisemad talitlushäired on järgmised:
1. Elektromagneti armatuur ei tõmba külge, kui selle mähis on vooluvõrku ühendatud.
Kui piduri mehaaniline osa on heas seisukorras, võib selle rikke põhjuseks olla üks järgmistest põhjustest:
-
solenoidmähise ebapiisav pinge (alla 90% alalisvoolu elektromagnetite KMP paralleelühenduse puhul kolmefaasiliste elektromagnetitega KMT AC, alla 85% VM elektromagnetite paralleelühenduse korral),
-
järjestikku ühendatud alalisvoolu elektromagnetite puhul – madal koormusvool (mootori armatuuriahel),
-
alalisvoolu elektromagnetite puhul – ebatavaliselt suur armatuurikäik, suurem kui passi väärtus,
-
kolmefaasiliste elektromagnetite mähiste vale kaasamine, näiteks nende vastupidine kaasamine, millega kaasneb märkimisväärne müra kuni mähiste kuumenemise kiire suurenemiseni,
-
katkestus või lühis mähises (esimesel juhul ei arenda mähis tõmbejõudu ja teisel juhul täheldatakse mähise ülehinnatud ja ebaühtlast kuumenemist).
2. Elektromagneti armatuuri "kleepumine" pärast selle mähise lahtiühendamist:
-
liigne määrde paksenemine külma ilmaga (pidurimehhanismi kinnijäämine),
-
alalisvoolu elektromagnetite mittemagnetilise tihendi kulumine või magnetahela liigendi muljumine (MO-seeria elektromagnetite puhul), mille tulemusena kaob vahe ikke ülemiste varraste ja armatuuri vahel (see vahe peab olema vähemalt 0,5 mm ),
-
KMP ja VM seeria pika käiguga alalisvoolu solenoidide puhul - juhthülsi kulumine, mille tõttu armatuur hakkab puudutama korpust või katet.
3. Ebatavaliselt vali müra, sisselülitatud vahelduvvoolu elektromagnetite sumin:
-
ankur ei ole täielikult sisse tõmmatud,
-
elektromagneti magnetahela vale paigaldamine või reguleerimine,
-
MO-seeria ühefaasilise elektromagneti lühistõrge.
4. Ebatavaliselt kõrge temperatuur solenoidi mähised:
-
ülehinnatud pinge paralleelühenduse elektromagnetis või ülehinnatud vool jadaühenduse elektromagnetides,
-
vahelduvvoolu elektromagnetitel — pooli mittetäielik armatuuri tõmbamine või pöördeahel.
5. Võrguga ühendatud elektrohüdraulilise tõukejõu rike:
-
elektrimootorit võrguga ühendavate juhtmete purunemine,
-
elektrohüdraulilise tõukuri varraste või kolvi kinnijäämine, piduriliigenditesse kinnijäämine,
-
liigne pingelangus (alla 90% nimiväärtusest).