Mis on lineaarne diferentsiaaltrafo
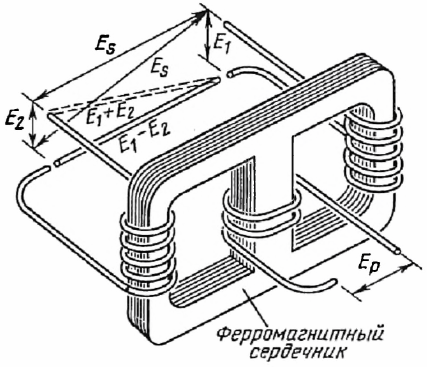
Ühes primaarmähis voolavat vahelduvvoolu saab kasutada kahe sekundaarmähise vahelduvpinge esilekutsumiseks. Kui kaks sekundaarmähist on oma omadustelt identsed ja neid pooli läbivate magnetvälja joonte kaks teed on samuti identsed, on kaks genereeritud sekundaarpinget võrdsed. Sellise struktuuriga seadet nimetatakse diferentsiaaltrafoks.

Diferentsiaaltrafol võib olla õhk- või magnetsüdamik.
Kaks sekundaarmähist saab ühendada kas faasis või antifaasis, esimesel juhul liidetakse nende pinged omavahel ja teisel juhul lahutatakse üks teisest.
Primaarmähist kasutatakse kahe sümmeetrilise sekundaarmähise ajamiseks, millest viimast saab ühendada nii, et sekundaarpinged liidavad või lahutavad üksteisest.
Kui kaks mähist on ühendatud lahutamisskeemi järgi, on nende pingete samade väärtuste korral kogu sekundaarpinge null.Kui ühe nendest mähistest magnetahela karakteristikuid muudetakse tahtlikult võrreldes teise pooli magnetahela karakteristikutega, siis kaks sekundaarpinget erinevad ja nende erinevus ei ole null.
Nendes tingimustes näitab kogu sekundaarpinge faas, millisel magnetvälja joonte teekonnal on suurim takistus, samas kui selle pinge amplituud peegeldab reluktantsi erinevuse väärtust.
Kui sama toimingut kasutatakse ühe tee magnettakistuse suurendamiseks ja teise tee magnettakistuse vähendamiseks, saavutab seda tegevust peegeldav väljundpinge maksimaalse väärtuse ja ülekandefunktsioon on suurima võimaliku lineaarsusega.
Kuna kaht sekundaarmähist ega kaht magnetvälja joonte rada ei saa teha täpselt ühesuguseks, on diferentsiaaltrafol alati kindel väljundpinge, isegi kui sisendis on null kasulikku signaali.
Lisaks on magnetahelate omadused mittelineaarsed. Selle mittelineaarsuse tulemusena tekivad rakendatud primaarergutuspinge põhisageduse isegi harmoonilised komponendid, mida sekundaarmähiste üheski paigutuses ei ole võimalik täielikult kompenseerida.
Õhuvahega ferromagnetilise vooluahela vastumeelsus on tugeva mittelineaarsusega vahe laiuse funktsioon. Sellest tulenevalt on sellise ahela ümber keritud pooli induktiivsus ka pilu laiuse mittelineaarne funktsioon.
Samal ajal, kui magnetvälja jõujoontel on kaks enam-vähem identset rada, millest igaühel on õhupilu, ja kui ühe pilu laius suureneb teise laiuse vähenedes, siis nende magnettakistuse erinevus teed võivad piisavalt lineaarselt varieeruda.
Diferentsiaaltrafo põhiprintsiibid väljenduvad praktikas mitmesugustes spetsiifilistes konstruktsioonikonfiguratsioonides paljudel erinevatel eesmärkidel.
Lineaarne muutuv diferentsiaalmuundur (LVDT) on passiivmuundur (sensor), mis töötab vastastikuse induktsiooni põhimõttel ja millega saab mõõta nihet, deformatsiooni, rõhku ja kaalu.
Enamasti saab neid NS-i abil kasutada nihke mõõtmiseks vahemikus mitu millimeetrit kuni sentimeetrini, teisendades I'm nihke otse elektrisignaaliks.
Pooli induktiivsus, mille läheduses või sees ferromagnetiline varras asub, on tugeva mittelineaarsusega funktsioon selle varda asukoha koordinaadist mähise suhtes.
Kui selline varras on mõne diferentsiaaltrafo ferromagnetiline ahel, võib sekundaarne diferentsiaalpinge olla varda nihke indikaator, sõltuvalt sellest nihkest piisavalt lineaarselt.
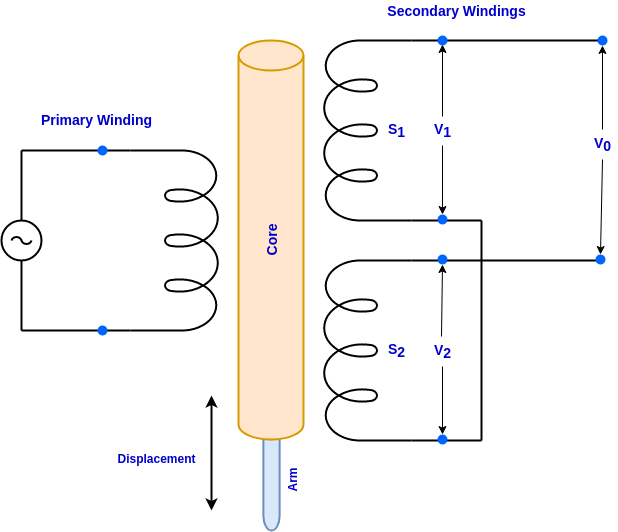
Primaarmähis on ühendatud vahelduvvooluallikaga. Kahel sekundaarmähisel S1 ja S2 on võrdne pöörete arv ja need on paigaldatud järjestikku üksteise vastas.
Seega on nendes mähistes indutseeritud EMF üksteise suhtes 180° faasist väljas ja seega kaob üldine efekt.

Diferentsiaaltrafo konstruktsioonis ette nähtud sümmeetrilise ferromagnetilise südamiku asukohta saab määrata sekundaarpinge faasi ja amplituudi järgi.
Kahe sekundaarpinge absoluutne erinevus näitab varda nihke absoluutväärtust kesk- ehk nullasendi suhtes ja selle erineva pinge faas näitab nihke suunda.
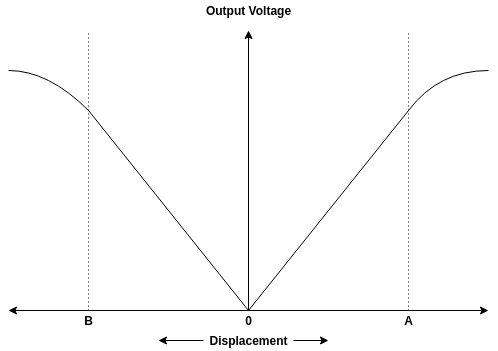
Lineaarse muutuva diferentsiaaltrafo B / I kõver on näidatud joonisel.
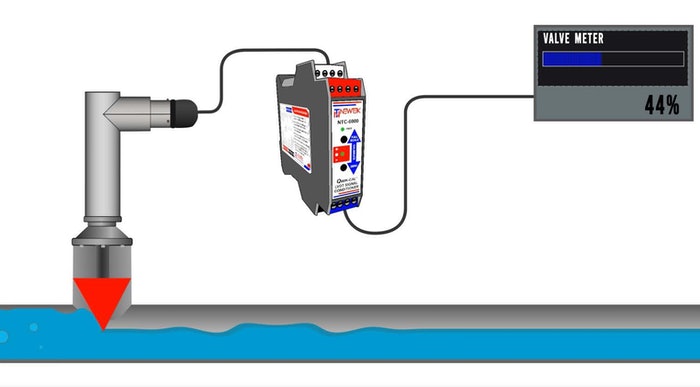
Näide lineaarse diferentsiaaltrafo kasutamise kohta täpse asenditagasiside saamiseks keemiatehaste, elektrijaamade ja põllumajandusseadmete klapi jälgimiseks ja juhtimiseks:
Sukelatavad nihkeandurid LVDT D5W:
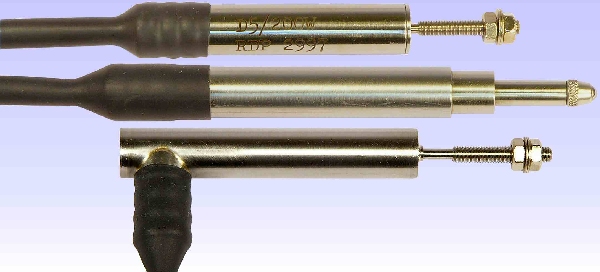
Need andurid on ette nähtud nihke ja asukoha mõõtmiseks. Need võimaldavad täpselt mõõta armatuuri (libiseva osa) asendit nihkeanduri korpuse suhtes.
Sukeldatavad nihkeandurid on ette nähtud mõõtmiste tegemiseks sobivasse vedelikku sukeldatuna. Mittemagnetilised vedelikud võivad armatuuritoru üle ujutada, ilma et see mõjutaks muunduri tööd. Need muundurid on saadaval kontrollimata või vedrutagastusega versioonidena.
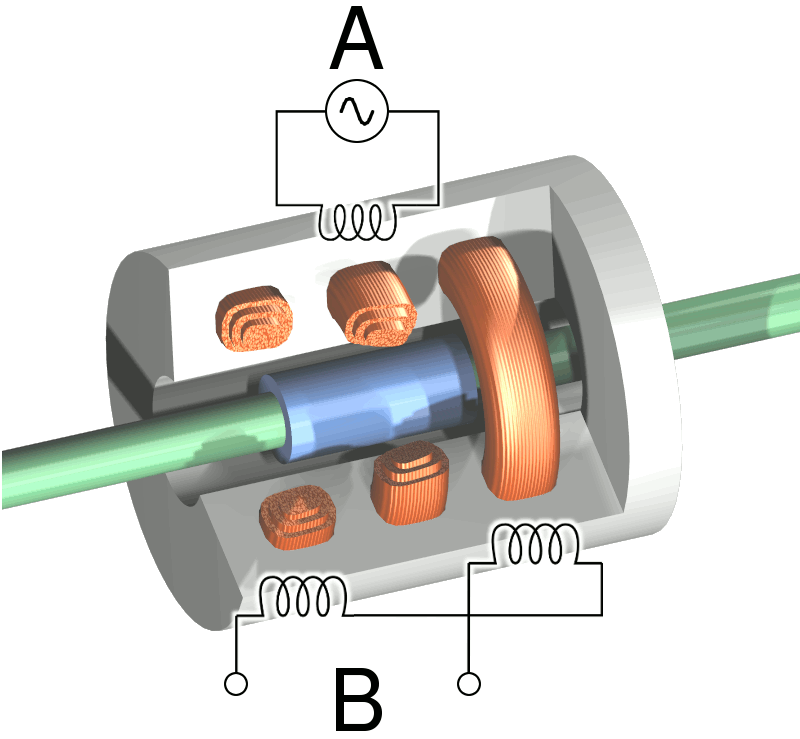
Erinevate tehnoloogiliste protsesside automatiseerimisel kasutatakse sageli kahepoolseid muundureid, millel on ferromagnetilise südamikuga diferentsiaaltrafo, mis sisestatakse selle otstest võrdsel kaugusel kahte sekundaarpooli.
Kui varras liigub aksiaalselt, liigub see sügavamale ühte nendest mähistest ja ulatub teisest välja.Kahe sekundaarpinge absoluutne erinevus näitab varda nihke absoluutväärtust kesk- ehk nullasendi suhtes ja selle erineva pinge faas näitab nihke suunda.
Pöörlev vahelduvvoolu diferentsiaaltrafo:
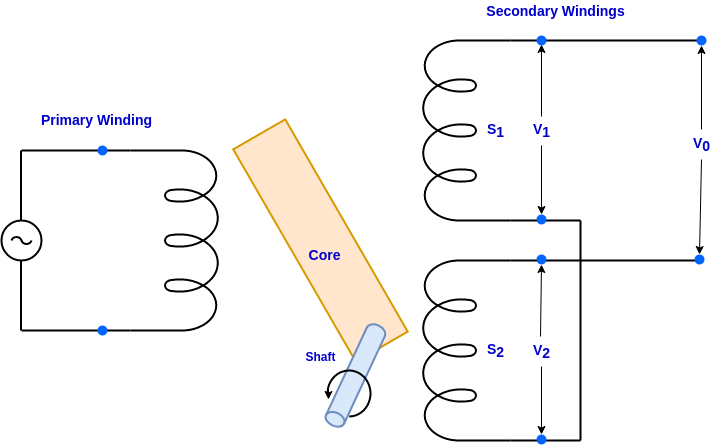
Pöörleva muutujaga diferentsiaaltrafo on passiivtrafo, mis põhineb vastastikuse induktsiooni põhimõttel. Seda kasutatakse nurknihke mõõtmiseks.
Selle konstruktsioon on sarnane lineaarse muutuva diferentsiaaltrafo omaga, välja arvatud südamiku konstruktsioon.
Primaarmähis on ühendatud vahelduvvooluallikaga. Kahel sekundaarmähisel S1 ja S2 on võrdne pöörete arv ja need on paigaldatud järjestikku üksteise vastas.
Lineaarse diferentsiaaltrafo eelised:
-
Südamiku ja mähiste vahel puudub füüsiline kontakt;
- Kõrge töökindlus;
-
Kiire vastus;
-
Pikk kasutusiga.
See on oma suure täpsuse tõttu kõige laialdasemalt kasutatav induktiivne andur.