Elektromagnetilised piduriseadmed
Mõnes seadmes kasutatakse masina pöörlevate elementide peatamiseks elektrimootori elektromagnetilist ketaspidurit. Elektromagnetiline piduriseade paigaldatakse otse mootorisse või mootorile ning on sisuliselt abimootor või ajam, mis vastab kõikidele nõuetele nii seadme paigutuse kui ka ohutu töötamise osas. Seda rakendatakse ja vabastatakse vedruga elektromagnetiga.
See lahendus võimaldab mitte ainult tagada mootori ohutut seiskamist õnnetuse korral või paigutada masina täitevelementi selle töö ajal, vaid ka lihtsalt lühendab masina tööaega selle seiskamise ajal.
Elektromagnetilisi ketaspidureid on kahte tüüpi: vahelduvvoolu ketaspidurid ja alalisvoolu ketaspidurid (olenevalt piduri jõuallikast). Piduri alalisvooluversiooni puhul antakse mootorile ka alaldi, mille kaudu saadakse alalisvoolu vahelduvvoolust, mis mootorit ennast toidab.
Piduriseadme konstruktsioon sisaldab: elektromagnetit, armatuuri ja ketast. Elektromagnet on valmistatud spetsiaalses korpuses paiknevate mähiste komplekti kujul. Armatuur toimib pidurdusmehhanismina ja on hõõrdumist takistav pind, mis suhtleb pidurikettaga.
Ketas ise koos sellele kantud hõõrdematerjaliga liigub mööda mootori võlli hülsi hambaid. Kui pidurimähistele rakendatakse pinget, tõmmatakse armatuur ja mootori võll saab koos pidurikettaga vabalt pöörlema.
Pidurdamine toimub vabas olekus, kui vedrud suruvad armatuuri ja see toimib pidurikettale, peatades seeläbi võlli.
Seda tüüpi pidureid kasutatakse laialdaselt elektriajamite süsteemides. Piduriseadme avariivoolukatkestuse korral võib olla võimalik pidur käsitsi vabastada.
Tõstukid kasutavad elektromagnetilist tossupidurit (TKG), et hoida võlli pidurdatud olekus, kui masin on välja lülitatud.
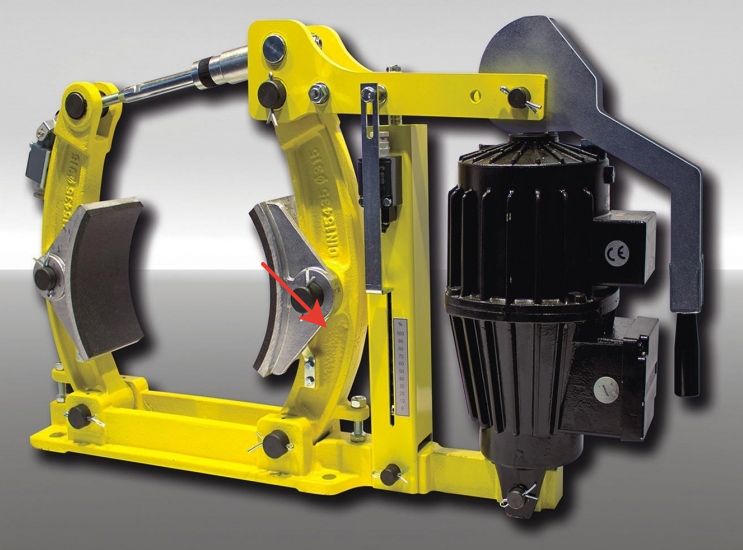
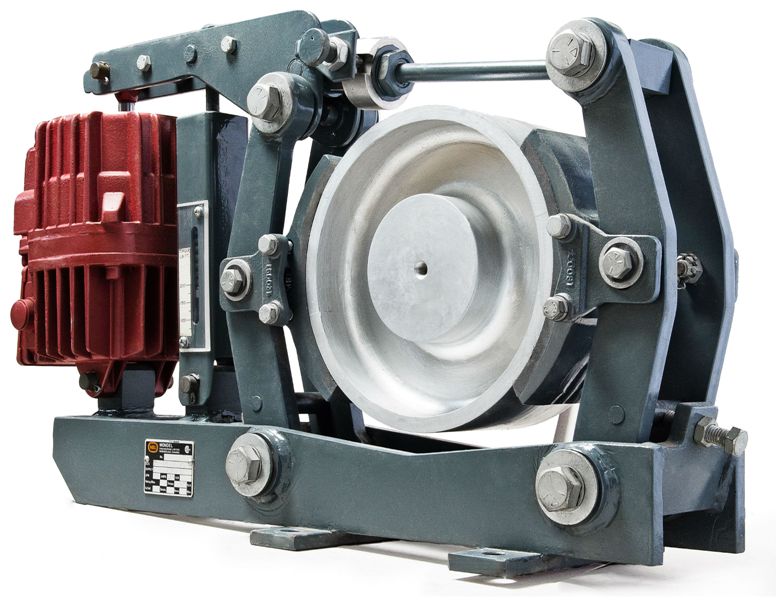
TKP — MP seeria alalisvoolupidur. TKG - elektrohüdrauliline kraanipidur, TE seeria. TKG pidurisolenoid sisaldab ajami- ja mehaanilist osa, mis omakorda sisaldab: alust, vedrusid, kangisüsteemi ja piduriklotse.
Piduriseade on paigaldatud vertikaalselt, piduriketas on horisontaalasendis. Vahelduv- või alalisvoolutoitega piduriseadmete mehaanilised osad on sama läbimõõduga rullide puhul samad.
Tavaliselt on sellistel seadmetel tähetähis TK ja number, mis näitab pidurirulli läbimõõtu. Kui toide on sisse lülitatud, neutraliseerivad hoovad vedrude tegevuse ja vabastavad rihmaratta, et võimaldada vaba pöörlemist.

Elektromagnetilisi pidureid kasutatakse:
-
kraanade, liftide, paigaldusmasinate jne blokeerimine. väljalülitatud olekus; konveierite, mähis- ja kudumismasinate, ventiilide, mobiilsete seadmete jms seiskamismehhanismides;
-
vähendada masinate seisakuaega (seisakuid seiskamise ajal);
-
eskalaatorite, segistite jne jne hädaseiskamissüsteemides;
-
et lõpetada täpse asukoha määramine teatud ajahetkel.
Puurplatvormidel kasutatakse induktsioonpidurdust, mis põhineb induktiivpooli magnetväljade vastasmõjul, mille rollis toimib elektromagnet, ja armatuuri, mille mähises indutseeritakse voolud, mille magnetväljad aeglustuvad. "põhjus, mis neid põhjustab" (vt Lenzi seadus), luues nii rootori jaoks vajaliku pidurdusmomendi.

Vaatame seda nähtust joonisel. Kui staatorimähises vool on sisse lülitatud, indutseerib selle magnetväli rootoris pöörisvoolu. Rootori pöörisvoolule avaldab mõju Ampere jõud, mille moment sel juhul aeglustub.
Nagu teate, võivad vahelduvvooluga asünkroonsed ja sünkroonsed masinad, samuti alalisvooluga masinad, kui võll liigub staatori suhtes, töötada pidurdusrežiimis. Kui võll on paigal (relatiivset liikumist pole), siis pidurdusefekt puudub.
Seega kasutatakse mootoripõhiseid pidureid pigem liikuvate võllide peatamiseks kui nende puhkeolekus hoidmiseks. Samas saab sellistel juhtudel sujuvalt reguleerida mehhanismi liikumise aeglustumise intensiivsust, mis on mõnikord mugav.
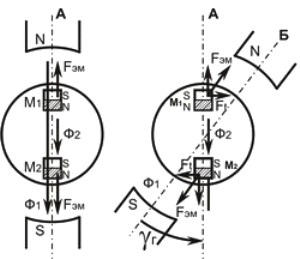
Järgmine joonis näitab hüstereesipiduri tööd.Kui staatori mähisele suunatakse vool, mõjutab pöördemoment rootorit, sel juhul see peatub ja tekib siin monoliitse rootori magnetiseerimise ümberpööramisest tuleneva hüstereesi nähtuse tõttu.
Füüsikaline põhjus seisneb selles, et rootori magnetiseerimine muutub selliseks, et selle magnetvoog langeb kokku staatori vooga. Ja kui proovite rootorit sellest asendist pöörata (nii, et staator oleks rootori suhtes asendis B), proovib see magnetjõudude tangentsiaalsete komponentide tõttu naasta asendisse A – ja nii toimub pidurdamine. sel juhul.