Andurite ühendusskeemid
Andurite ühendusskeemid, mida sagedamini nimetatakse mõõteahelad, on mõeldud anduri väljundväärtuse teisendamiseks ja enamikul juhtudel on see nende sisemise takistuse muutus mugavamaks väärtuseks selle hilisemaks kasutamiseks. Reeglina on tegemist elektrivoolu või pingemuutusega, mida saab kas otse määrata elektrilise mõõteseadme abil või peale võimendamist suunata sobivasse ajamisse või salvestusseadmesse.

Nendel eesmärkidel kasutatakse laialdaselt järgmisi lülitusskeeme:
-
järjekindel,
-
kõnnitee,
-
diferentsiaal,
-
kompenseeriv.
Järjestikune skeem koosneb alalis- või vahelduvvooluallikast, Rx andurist endast, mõõteseadmest või otseajami mehhanismist ja tavaliselt täiendavast takistusest Rd, mis piirab voolu selles ahelas (joonis 1). Sellist lülitusahelat kasutatakse kõige sagedamini ainult kontaktanduritega, mille puhul Rx = 0 või Rx = ?.
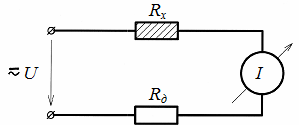
Riis. 1. Jadaahel andurite ühendamiseks
Kuna töötades mõõteseadme ahelas teiste anduritega, voolab alati avaldisega I = U /(Rx + Rd) määratud elektrivool ja anduri sisetakistuse kerge muutus toob kaasa väga väikese muutuse. selles voolus. Selle tulemusena kasutatakse mõõteseadme skaala minimaalset osa ja mõõtmise täpsus väheneb praktiliselt nullini. Seetõttu kasutatakse enamiku teiste andurite puhul spetsiaalseid mõõteahelaid, mis suurendavad oluliselt mõõtmise tundlikkust ja täpsust.
Kõige sagedamini kasutatav silla ahel lülitus, mille käigus ühendatakse üks ja mõnikord ka mitu andurit teatud viisil koos lisatakistitega nelinurgas (nn. Winstoni sild), millel on kaks diagonaali (joonis 2). Üks neist, mida nimetatakse a-b võimsusdiagonaaliks, on mõeldud alalis- või vahelduvvooluallika ühendamiseks ja teine, c-d mõõtediagonaal, sisaldab mõõteseadet.
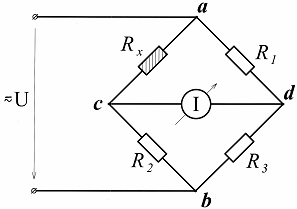
Riis. 2. Sillaahel andurite ühendamiseks
Kui nelinurga vastaskülgede (sillaharud) takistuste väärtuste korrutised on võrdsed Rx x R3 = R1NS R2, on punktide c ja d potentsiaalid võrdsed ning mõõtmisdiagonaalis voolu ei teki. Seda sillaahela olekut nimetatakse tavaliselt silla tasakaal, st. silla ahel on tasakaalustatud.
Kui Rx anduri takistus välismõjul muutub, siis tasakaal rikutakse ja läbi mõõteseadme voolab selle takistuse muutusega võrdeline vool. Sellisel juhul näitab selle voolu suund, kuidas anduri takistus on muutunud (suurenenud või vähenenud).Siin, sobiva mõõteseadme tundlikkuse valikuga, kõik see töökaal.
Vaadeldavat sillaahelat nimetatakse tasakaalustamata, kuna mõõtmisprotsess toimub kell tasakaalutus sild, st. tasakaalutus. Tasakaalustamata sillalülitust kasutatakse kõige sagedamini juhtudel, kui anduri takistus välisjõudude mõjul võib ajaühikus väga kiiresti muutuda, kuid siis on mõõteseadme asemel otstarbekam kasutada salvestusseadet, mis neid salvestab. muutused.
Seda peetakse tundlikumaks tasakaalustatud sillaahel, milles skaalaga varustatud spetsiaalne mõõtereostaat R (joonis 3), mida mõõtmistehnikas nimetatakse reokordiks, on lisaks ühendatud kahe kõrvuti asetseva haruga.
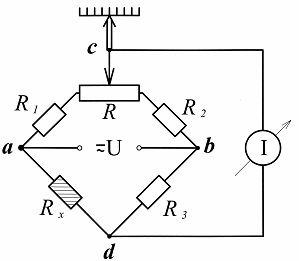
Riis. 3. Tasakaalustatud sillaahel
Sellise vooluringiga töötades tuleb iga anduri takistuse muutusega sillaahel kaasasoleva liuguriga ümber tasakaalustada, st. samas kui mõõtediagonaalis voolu ei ole. Sel juhul määratakse mõõdetud parameetri väärtus (anduri takistuse väärtuse muutus) spetsiaalse skaala abil, mis on varustatud selle kirjega ja kalibreeritud anduri mõõdetud väärtuse ühikutes.
Tasakaalustatud silla suurem täpsus on seletatav asjaoluga, et voolupuudust mõõteseadmes on lihtsam määrata kui selle väärtust otse mõõta ning silla tasakaalustamine toimub sellistel juhtudel reeglina kasutades spetsiaalne elektrimootor, mida juhib sillaahela tasakaalustamatuse signaal.
Andurite lülitamise sildahelaid peetakse universaalseteks, kuna neid saab toita nii alalis- kui ka vahelduvvooluga ning mis kõige tähtsam, nende ahelatega saab korraga ühendada mitu andurit, mis aitab suurendada mitte ainult tundlikkust, vaid ka mõõtmise täpsus.
Diferentsiaalskeem andurite kaasamine on ehitatud spetsiaalse vahelduvvooluvõrgust toitava trafo abil, mille sekundaarmähis on jagatud kaheks identseks osaks. Seega moodustuvad selles vooluringis (joonis 4) kaks kõrvuti asetsevat ahelat, millest igaühel on oma vooluahel I1 ja I2. Ja voolu väärtuse mõõteseadmes määrab nende voolude erinevus ja kui anduri Rx ja lisatakisti Rd takistused on võrdsed, siis mõõteseadmes voolu ei tule.
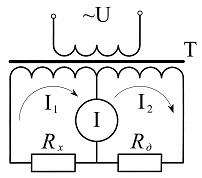
Riis. 4. Diferentsiaalanduri lülitusahel
Anduri takistuse muutumisel voolab mõõteseadmest läbi selle muutusega proportsionaalne vool ja selle voolu faas sõltub selle takistuse muutumise olemusest (suurenemine või vähenemine). Diferentsiaalahela toiteks kasutatakse ainult vahelduvvoolu ja seetõttu on sobivam anduritena kasutada reaktiivandureid (induktiivseid või mahtuvuslikke).
Eriti mugav on sellist lülitusahelat kasutada diferentsiaal-induktiiv- või mahtuvusanduritega töötamisel. Selliste andurite kasutamisel registreeritakse mitte ainult näiteks ferromagnetilise südamiku (joonis 5) liikumise suurusjärk, vaid ka selle liikumise suund (selle märk), mille tulemusena vahelduva faasi faas. mõõteseadet läbiv vool , muutub.See suurendab veelgi mõõtmise tundlikkust.
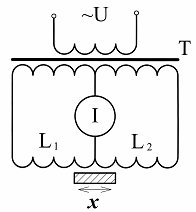
Riis. 5. Induktiivse diferentsiaalanduri ühendusskeem
Tuleb märkida, et mõõtmise täpsuse suurendamiseks kasutatakse mõnel juhul ka teist tüüpi sarnaseid mõõteahelaid, näiteks tasakaalustatud diferentsiaalahelad… Sellised vooluringid hõlmavad kas korduvat akordi või spetsiaalset mõõtmisautotransformaatorit, millel on eriline skaala ja mõõtmisprotsess selliste vooluahelatega on sarnane tasakaalustatud sillaahelaga mõõtmisele.
Hüvitisskeem andurite kaasamist peetakse kõigist eespool käsitletutest kõige täpsemaks. Selle töö põhineb väljundpinge kompenseerimisel või EMF-il. sellega võrdne andur mõõtereostaadi (reokordi) pingelanguse poolest. Kompensatsiooniahela toiteks kasutatakse ainult alalisvooluallikat ja seda kasutatakse peamiselt alalisvoolu generaatori anduritega.
Vaatame selle vooluringi tööd termopaari andurina kasutamise näitel (joonis 6).
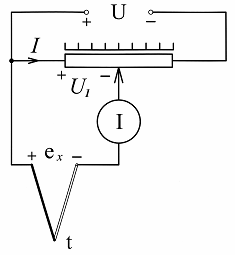
Riis. 6. Termoelektrilise anduri sisselülitamise kompensatsiooniahel
Rakendatud pinge U toimel läbib mõõtereostaadi vool, mis põhjustab pinge U1 languse reostaadi sektsioonis selle vasakpoolsest väljundist mootorini. Selle pinge ja EMF-termopaaride võrdsuse korral ei toimu glükomeetrit voolu.
Kui emf-anduri väärtus muutub, on vaja selle voolu puudumine uuesti saavutada, kasutades liuguri liugurit. Siin, nagu tasakaalusilla ahelas, on mõõdetud parameetri väärtus, meie puhul temperatuur (emf termopaar) määratakse liugtraadi mõõtkava järgi ja selle mootori liikumine toimub enamasti ka spetsiaalse elektrimootori abil.
Kompensatsiooniahela suur täpsus tuleneb asjaolust, et mõõtmise ajal ei tarbita anduri genereeritud elektrienergiat, kuna selle kaasamise vooluringis on vool null. Seda skeemi saab kasutada ka parameetriliste anduritega, kuid siis on vaja täiendavat alalisvooluallikat, mida kasutatakse parameetrilise anduri toiteahelas.