Pööratav ühefaasiline mootor
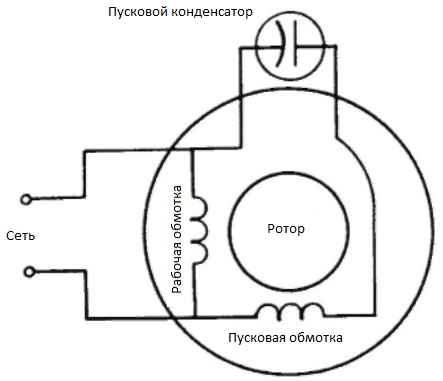
Asünkroonmootorit nimetatakse ühefaasiliseks mootoriks, mille staatoril on ainult üks töötav mähis, mida toidab otse võrgu üks faas. Ühefaasilises mootoris on ka abi(käivitus)mähis, mida kasutatakse ainult mootori käivitamisel rootorile algimpulsi andmiseks, tegelikult lülitatakse käivitusmähis sisse, et rootor välja võtta. tasakaaluasendisse, vastasel juhul ei liigu see ilma abita ja teda tuleb mingil muul viisil lükata.
Nagu igal mootoril, on ka ühefaasilisel mootoril pöörlev rootor ja staator, mis on paigal, kuid loob ainult ajas muutuva magnetvälja. Töö- ja käivitusmähised asuvad staatoril üksteise suhtes täisnurga all ning töömähis võtab kaks korda rohkem pilusid kui käivitusmähis.
Võib öelda, et käivitamise ajal töötab selline mootor kahefaasilisena ja lülitub seejärel ühefaasilisele töörežiimile. Ühefaasilise asünkroonmootori rootor on kõige levinum konstruktsioon - oravapuur (oravapuur) või silindriline (õõnes).
Mis siis, et staatoril pole üldse starteri mähist või see oli olemas, aga ei kasutatud. Sel juhul, kui mootor on võrku ühendatud, ilmub töömähisesse pulseeriv magnetväli ja rootor langeb sellesse tungiva muutuva magnetvoo tingimustes.
Aga kui rootor on algselt paigal ja me rakendame äkitselt ainult töömähisele vahelduvvoolu, siis rootor ei liigu oma kohalt, sest kogu pöördemoment (päripäeva ja vastupäeva) on vaatamata indutseeritud emf-ile null. rootor ja pöörlemiseks pole põhjust, sest Ampere'i esilekerkivad jõud tühistavad üksteist.
Hoopis teine asi on, kui rootorit lükata, siis jätkab ta pöörlemist algtõukega samas suunas, sest nüüd, mitte ainult elektromagnetilise induktsiooni seaduse järgi, indutseeritakse rootoris EMF ja vastavalt tekivad voolud, mida amprite seaduse kohaselt magnetväli tõrjub, aga ka (kuna rootor juba pöörleb) on tõukesuunaline pöördemoment suurem kui tõukesuuna vastane pöördemoment. . Selle tulemusena saame rootori pideva pöörlemise.
Selleks, et käivitusmähis rootorit käivitusmomendil lükkaks, ei pea seda mitte ainult töömähise suhtes ruumiliselt nihutama, vaid ka selles olevat voolu nihutama faasi töömähise voolu suhtes, siis nende kahe staatorimähise kombineeritud toime on samaväärne mitte ainult pulseeriva magnetväljaga, vaid juba ka pöörleva magnetväljaga. Ja see on täpselt see, mida on vaja rootori kiirendamiseks ühefaasilise mootori käivitamisel.
Käivitusmähise voolu faasinihkeks kasutatakse tavaliselt vajaliku mahtuvusega kondensaatorit, mis on ühendatud käivitusmähisega järjestikku ja tekitades 90-kraadise faasinihke. See on jagatud faasiga mootorite standardlahendus.
Niipea kui mootor on võrku ühendatud, vajutab operaator lülitusnuppu, mis varustab energiaga mähise käivitusahelat ja niipea kui kiirus saavutab võrgu antud sagedusel nimiväärtusele vastava vajaliku väärtuse, nupp vabastatakse.
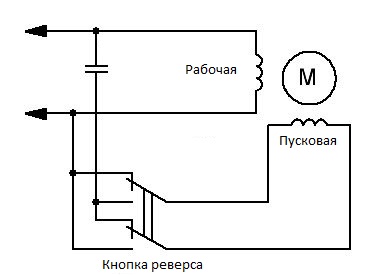
Ühefaasilise kondensaator-käivitusmootori ümberpööramiseks piisab, kui luua tingimus, kus käivitusimpulss antakse teises suunas kui algselt tarnitud. See saavutatakse faaside pöörlemise suhtelise järjekorra muutmisega töö- ja käivitusmähistes.
Nende tingimuste tagamiseks on vaja töö- või käivitusmähis ümber lülitada, st muuta selle klemmide võrgu või võrgu ja kondensaatoriga ühendamise "polaarsust". Seda on lihtne teha, kuna ühefaasilisel mootoril on klemmiplokk, mille külge on toodud nii käivitus- kui ka töömähise mõlemad otsad. Jooksupoolil on väiksem aktiivtakistus kui käivitusmähisel, seega on seda lihtne multimeetriga leida. Parim lahendus on panna käivituspooli juhtmed kahepooluselisele momentlülitile.