Induktiivsete läheduslülitite tööpõhimõte, sordid ja nende kasutamise näited
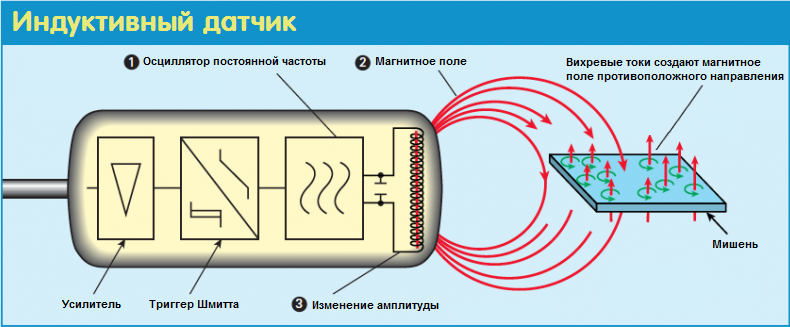
Kontaktivabu induktiivlüliteid (lähedusandureid) kasutatakse erinevate tööstuslike objektide automaatseks kontaktivabaks tuvastamiseks. Nende tööpõhimõte põhineb generaatori võnkeamplituudi muutumisel, mis on seotud teatud suurusega ferromagnetilise, magnetilise või metallilise objekti sisestamisega anduri tööpiirkonda.
Kui andur on sisse lülitatud, toimib selle tööpiirkonnas vahelduv magnetväli ja kui nüüd sisestatakse sellesse piirkonda metall, suunatakse sihtmärgid sellele metallile. pöörisvoolud põhjustab muutuse generaatori algses võnkeamplituudis, samas kui muutuse suurus sõltub metalleseme ja anduri vahelisest kaugusest. Flip-flop teisendab analoogsignaali vastava väärtuse loogikasignaaliks, mis määrab hüstereesi väärtuse ja lülitustaseme.

Lüliti ise on antud kontekstis pooljuhtmuundur, mis juhib teatud välise päästikahela olekut olenevalt vaadeldava objekti asukohast ning objekti asukoht määratakse ilma anduriga mehaanilise kontaktita.
Nagu te ilmselt juba aru saite, on siin tundlik element induktiivpool, mille magnetahel on avatud tööpiirkonna suunas.
Induktiivsed piirlülitid kuuluvad suurde rühma mittekontaktsed andurid mehhanismide asukoha määramiseks, mis on tänapäevastes automaatsüsteemides väga levinud.
Induktiivne läheduslüliti teatud automaatikasüsteemis toimib peamise tööriistana teatud seadmete asukoha jälgimiseks, mille signaale töödeldakse olenevalt seadme otstarbest tooteloendurilt, liikumiskontrollerilt, häiresüsteemilt, jne n. .
Eelkõige kasutatakse metallesemete loendamiseks ja nende asukoha jälgimiseks sageli induktiivseid läheduslüliteid, näiteks pudelid liiguvad mööda konveieri, mille korgidel neid loendatakse, või montaažitöökojas toimub tööriistavahetus pärast loendurit, äärikut. on induktiivse anduri vahemikus. …
Lüliti tööprotsessi saab kirjeldada järgmiselt. Tööolekus pulseerib kontaktivaba anduri tööpinna ees konstantse amplituudiga magnetväli.
Kui metall satub andurile lähedale (näiteks pudeli plekkkork või robotikoosseisus osalev osa), kipub magnetvälja võnkumisi summutama, vastavalt Demoduleeritud pinge langeb, käivitub päästik, mis viib kuni lülituselemendi sisselülitamiseni (nt kuni loenduri käivitamiseni või tööriista vahetamiseni).
Kontaktivabade induktiivlülitite juhtimis- või loendusobjektidena võivad olla kõik piisava suurusega metallesemed, näiteks: võlli eendid, äärikud, terasplaadid, ühenduspoldipead jne.

Vastavalt juhitava ahela kommutatsioonipõhimõttele ja sellega ühendamise meetodile on induktiivandureid saadaval mitut sorti, erineva juhtmete arvuga. Andurid on ehitatud NPN- või PNP-lülitite baasil, need võivad olla nii normaalselt suletud kui ka normaalselt avatud.
Kahejuhtmeline - need on ühendatud otse koormusahelaga ja saavad selle kaudu toite, siin on väga oluline jälgida polaarsust ja nimikoormuse takistust, vastasel juhul ei tööta andur õigesti.
Kõige tavalisemad on kolmejuhtmelised lülitid, neil on toide kahel juhtmel ja kolmandat kasutatakse lülitatava koormuse ühendamiseks.
Lõpuks on neljajuhtmelistel lülititel võimalus valida lülitusrežiimi (tavaliselt suletud või tavaliselt avatud).
Veel üks levinud asendiandurite tüüp kaasaegsetes automaatsüsteemides: Optilised läheduslülitid