Kontaktivabad magnetlaagrid: seade, võimalused, eelised ja puudused
Rääkides magnetlaagritest või mittekontaktsetest vedrustustest, ei saa mainimata jätta nende märkimisväärseid omadusi: pole vaja määrimist, ei ole hõõrduvaid osi, seega puuduvad hõõrdekadud, äärmiselt madal vibratsioonitase, suur suhteline kiirus, madal energiatarve, automaatjuhtimine ja laagrite jälgimine. süsteem, tihendusvõime.
Kõik need eelised muudavad magnetlaagrid parimaks lahenduseks paljudele rakendustele: gaasiturbiinidele, krüogeentehnoloogiale, kiiretele elektrigeneraatoritele, vaakumseadmetele, erinevatele metallilõikamismasinatele ja muudele seadmetele, sealhulgas ülitäpsetele ja kiiretele seadmetele. (umbes 100 000 p/min), kus on oluline mehaaniliste kadude, häirete ja vigade puudumine.
Põhimõtteliselt jagunevad magnetlaagrid kahte tüüpi: passiivsed ja aktiivsed magnetlaagrid. Valmistatakse passiivseid magnetlaagreid põhinevad püsimagnetitel, kuid see lähenemine pole kaugeltki ideaalne, seetõttu kasutatakse seda harva.Paindlikumad ja avaramad tehnilised võimalused avanevad aktiivlaagritega, milles juhtmemähistes vahelduvate voolude abil tekitatakse magnetväli.
Kuidas kontaktivaba magnetlaager töötab

Aktiivse magnetvedrustuse või laagri töö põhineb elektromagnetilise levitatsiooni põhimõttel — levitatsioonil elektri- ja magnetvälja abil. Siin toimub võlli pöörlemine laagris ilma pindade füüsilise kokkupuuteta üksteisega. Sel põhjusel on määrimine täielikult välistatud ja mehaaniline kulumine puudub. See suurendab masinate töökindlust ja tõhusust.
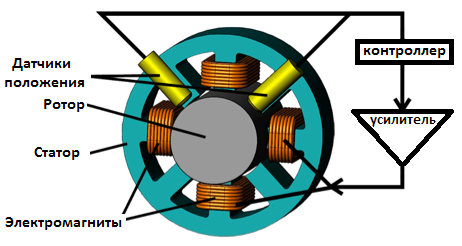
Eksperdid märgivad ka rootori võlli asendi jälgimise tähtsust. Andurisüsteem jälgib pidevalt võlli asendit ja annab automaatjuhtimissüsteemile signaale täpseks positsioneerimiseks, reguleerides staatori positsioneerimismagnetvälja - tõmbejõudu võlli soovitud poolel tugevdab või nõrgestab voolu reguleerimine aktiivsete laagrite staatori mähised .
Kaks koonuslaagrit või kaks radiaal- ja üks aksiaalne aktiivlaagrit võimaldavad rootori riputamist ilma kontaktita sõna otseses mõttes õhus. Kardaani juhtimissüsteem töötab pidevalt, see võib olla digitaalne või analoog. See tagab suure pidamistugevuse, suure kandevõime ning reguleeritava jäikuse ja löögisummutusvõime. See tehnoloogia võimaldab laagritel töötada madalatel ja kõrgetel temperatuuridel, vaakumis, suurtel kiirustel ja kõrgendatud steriilsusnõuete tingimustes.
Aktiivne kontaktivaba magnetlaagriseade
Eelnevast on selge, et aktiivse magnetvedrustussüsteemi põhiosad on: magnetlaager ja automaatne elektrooniline juhtimissüsteem. Elektromagnetid mõjutavad rootorit pidevalt erinevatest külgedest ja nende toime on allutatud elektroonilisele juhtimissüsteemile.

Radiaalmagnetlaagri rootor on varustatud ferromagnetiliste plaatidega, millele avaldab mõju staatori mähistest tulev retentiivne magnetväli, mille tulemusena riputatakse rootor staatori keskele ilma seda puudutamata Induktiivsed andurid jälgivad staatori asendit. rootor kogu aeg. Iga kõrvalekaldumine õigest asendist põhjustab signaali, mis saadetakse kontrollerile, et rootor soovitud asendisse tagasi viia. Radiaalne kliirens võib olla vahemikus 0,5–1 mm.
Magnetiline tugilaager toimib sarnaselt. Veoketta võlli külge on kinnitatud rõngakujulised elektromagnetid. Elektromagnetid asuvad staatoril. Aksiaalsed andurid asuvad võlli otstes.
Masina rootori usaldusväärseks hoidmiseks selle seiskamise või kinnitussüsteemi rikke ajal kasutatakse turvakuullaagreid, mis on fikseeritud nii, et nende ja võlli vahe on võrdseks poolega magnetlaagri omast. .
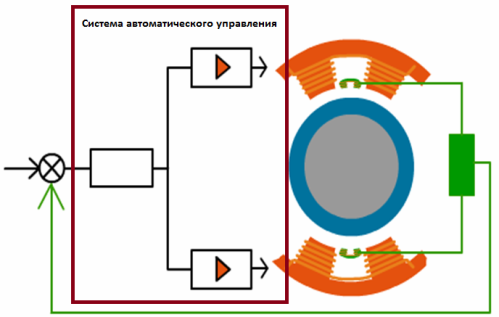
Automaatne juhtimissüsteem asub kapis ja vastutab elektromagneteid läbiva voolu õige moduleerimise eest vastavalt rootori asendiandurite signaalidele. Võimendite võimsus on seotud elektromagnetite maksimaalse tugevusega, õhupilu suuruse ja süsteemi reaktsiooniajaga rootori asendi muutumisele.
Kontaktivabade magnetlaagrite võimalused
Maksimaalset võimalikku rootori kiirust radiaalses magnetlaagris piirab ainult ferromagnetiliste rootoriplaatide võime tsentrifugaaljõule vastu seista. Tavaliselt on perifeerse kiiruse piirang 200 m / s, samas kui aksiaalsete magnetlaagrite puhul piirab piirangi piiriku valuterase takistus - tavaliste materjalidega 350 m / s.
Rakendatud ferromagnetid määravad ka maksimaalse koormuse, mida laager suudab vastu pidada vastava laagri staatori läbimõõdu ja pikkusega. Standardmaterjalide puhul on maksimaalne rõhk 0,9 N / cm2, mis on väiksem kui tavaliste kontaktlaagrite puhul, kuid koormuse kadu saab kompenseerida suure perifeerse kiirusega koos suurema võlli läbimõõduga.
Aktiivse magnetlaagri energiatarve ei ole väga suur. Suurimad kaod laagris on tingitud pöörisvooludest, kuid see on kümme korda väiksem energiast, mis läheb kaduma tavaliste laagrite kasutamisel masinates. Kui haakeseadised, termotõkked ja muud seadmed välja arvata, töötavad laagrid tõhusalt vaakumis, heeliumis, hapnikus, merevees ja mujal. Temperatuurivahemik on -253 ° C kuni + 450 ° C.
Magnetlaagrite suhtelised puudused
Samal ajal on magnetlaagritel ka puudusi.
Kõigepealt on vaja kasutada lisaturva-rull-laagreid, mis taluvad maksimaalselt kahte riket, misjärel tuleb need uute vastu välja vahetada.
Teiseks automaatse juhtimissüsteemi keerukus, mis ebaõnnestumise korral nõuab keerukat remonti.
Kolmandaks tõuseb suurte voolude korral laagri staatori mähise temperatuur — mähised kuumenevad ja vajavad oma jahutust, eelistatavalt vedelikjahutust.
Lõpuks on kontaktivaba laagri materjalikulu suur, kuna laagri pind peab olema piisava magnetjõu toetamiseks suur – laagri staatori südamik on suur ja raske. Pluss magnetilise küllastuse nähtus.

Kuid vaatamata ilmsetele puudustele kasutatakse praegu magnetlaagreid laialdaselt, sealhulgas ülitäpsetes optilistes süsteemides ja laserseadmetes. Nii või teisiti on alates eelmise sajandi keskpaigast magnetlaagrid kogu aeg paranenud.