Dünaamiline mootoriga pidurdamine
 Dünaamilist pidurdamist kasutatakse mootori kiireks ja täpseks seiskamiseks. Seal on mootori dünaamilise pidurdamise skeem koos töö kirjeldusega siin… Samas artiklis käsitleme oravpuuri ja faasirootori asünkroonmootorite dünaamilise pidurdamise ajal toimuvaid füüsilisi protsesse.
Dünaamilist pidurdamist kasutatakse mootori kiireks ja täpseks seiskamiseks. Seal on mootori dünaamilise pidurdamise skeem koos töö kirjeldusega siin… Samas artiklis käsitleme oravpuuri ja faasirootori asünkroonmootorite dünaamilise pidurdamise ajal toimuvaid füüsilisi protsesse.
Oravapuuri rootori dünaamiline pidurdamine toimub pärast staatori mähise vooluvõrgust lahtiühendamist. Mootor seiskub pärast mähise ühendamist alalisvoolu toitega.
Alalisvoolud staatori mähise faasides põhjustavad vastava EMF-i, mis ergastab mootoris statsionaarset magnetvälja. See indutseerib pöörleva rootori mähisefaasides vahelduvaid emf-i ja kahaneva sagedusega voolusid. Seetõttu läheb asünkroonmootor fikseeritud magnetpoolustega generaatori režiimi. Selles režiimis muundab mootor tootmismehhanismi inertsi teel liikuvate ja pöörlevate lülide kineetilise energia elektrienergiaks, mis muundatakse rootori mähise ahelas soojusenergiaks.
Staatorimähise magnetomotoorjõu poolt ergastatud magnetvälja koostoime rootorimähise faasides oleva vooluga põhjustab pidurdusmomendi ilmnemise, mille mõjul mootori rootor peatub.
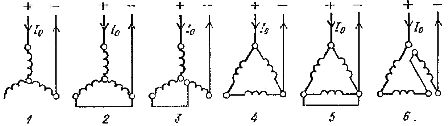
Riis. 1. Kolmefaasilise asünkroonmootori staatorimähise faaside sisselülitamise skeemid konstantse pinge jaoks dünaamilise pidurdamise ajal
Pidurdusmomendi suurus sõltub staatori mähise magnetomotoorjõu väärtusest, rootori mähise ahela reguleeritavate takistite aktiivtakistuse väärtusest ja selle kiirusest. Rahuldava pidurdamise saavutamiseks peab alalisvool olema 4-5 korda suurem asünkroonmootori tühivoolust.

Induktsioonmasina mehaanilised omadused dünaamilise pidurdamise ajal läbivad alguspunkti, kuna varasel nullkiirusel puudub pidurdusmoment. Maksimaalse pidurdusmomendi väärtus suureneb alalisvoolu suurenemisega, kuid see ei sõltu rootori mähise ahelasse sisestatud reguleeritavate takistite aktiivtakistuste väärtusest, mis määravad selle kiiruse, mille juures pöördemoment jõuab. väärtus Mt = MlyulkaG... Antud pidurdusmomendil Mt takistite aktiivtakistuse suurendamine Rd toob kaasa rootori kiiruse tõusu.
Asünkroonmootorite dünaamiline pidurdamine on üsna ökonoomne ja teostatav nii sünkroonkiirusest väiksematel kui ka seda ületavatel kiirustel (joon. 2).
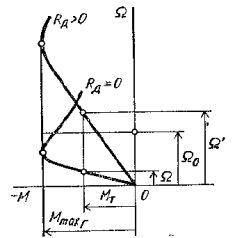
Riis. 2. Kolmefaasilise mähitud rootoriga asünkroonmootori mehaanilised omadused dünaamilisel pidurdamisel
Oravpuurirootoriga kolmefaasiliste asünkroonmootorite puhul kasutatakse sageli ka kondensaatorpidurdust, mille puhul ühendatakse staatorimähise klemmidega sümmeetriline kolmefaasiline kondensaatoripank, mis pärast masina vooluvõrgust lahtiühendamist ja inertsist pöörlev rootor ergastab staatorimähises kolmefaasilise sümmeetrilise pingesüsteemi. Seoses masina üleminekuga generaatorirežiimile tekib pidurdusmoment, mis vähendab mootori rootori kiirust. Loe selle kohta lähemalt siit: Asünkroonmootorite kondensaatorpidurdus