Kuidas määrata asünkroonmootori libisemist seadistamise ja töötamise ajal
Kui mootori pöörlemiskiirus on oluliselt erinev sünkroonselt, mõõdetakse tahhomeetri või tahhogeneraatoriga, mis on ühendatud otse elektrimootori võlliga ja mootori libisemine määratakse valemiga S = (n1 — n2) / n1, kus n1 = 60f / p — sünkroon pöörlemissagedus; n2 on tegelik kiirus.
Selle elektrimootori libisemise määramise meetodi eelised: mõõtmiskiirus ja võime teostada nii konstantset kui ka muutuvat kiirust. Selle mõõtmismeetodi puudusteks on tavaliste tahhomeetrite madal täpsus (viga 1–8%) ja nende kalibreerimise keerukus. Lisaks ei saa tahhomeetrit kasutada väikese võimsusega elektrimootorite testimisel, kuna tahhomeetri mehhanismi hõõrdekaod kujutavad endast märgatavat koormust.
Erinevate mõõtmiste tegemiseks on käeshoitav tahhomeetriga tavaliselt kaasas mitmesuguse kuju ja otstarbega vahetatavate otsikute komplekt, mis asetatakse rulli otsa (joonis 1). Kõige laialdasemalt kasutatav nendest otstest on kummikoonus, mis on paigaldatud metallkassetti. Kõiki neid näpunäiteid kasutatakse elektrimasina võlli otsas oleva terava süvendiga kokkupuutumiseks. Kummist keskotsa kasutatakse kõrgete sageduste jaoks, terasotsa madalate kuni keskmiste sageduste jaoks.
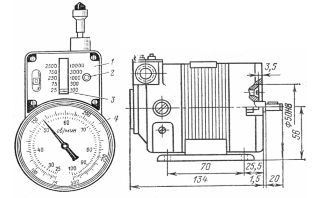 Riis. 1. IO -10 tüüpi tsentrifugaaltahhomeetri ja tahhogeneraatori üldvaade: 1 — skaala; 2 — lülitusnupp; 3 — piirnäidik; 4 — vali
Riis. 1. IO -10 tüüpi tsentrifugaaltahhomeetri ja tahhogeneraatori üldvaade: 1 — skaala; 2 — lülitusnupp; 3 — piirnäidik; 4 — vali
Kui võlli keskel on lohk, kasutatakse pikendust, mis asetatakse tahhomeetri võllile ja vastav otsik pikendusele. Keskuste puudumisel või ebapiisavusel kasutatakse rullikut, mis surutakse külgpinnalt (kummirõngast) pöörleva võlli pinnale.
Vastavalt konkreetsetele mõõtmistingimustele valige kinnitus (pikendusots). Enne mõõtmise alustamist eemaldage soone keskelt või võlli pinnalt rasv, mustus, tolm.
Elektrimootori pöörlemiskiiruse mõõtmiseks tuleb esmalt määrata tahhomeetri vajalik mõõtmispiir. Kui sageduse mõõtmise järjekord pole teada, tuleb tahhomeetri kahjustamise vältimiseks alustada mõõtmist kõrgeimast piirist.
Mõõtmine peaks toimuma lühiajaliselt (3–5 s), surudes tahhomeetri ots ettevaatlikult vastu pöörlevat võlli kerge survega nii, et tahhomeetri võlli telg langeb kokku mõõdetava võlli teljega või kui kasutades rulli, on sellega paralleelne.

Kui libisemine ei ületa 5%, saab kiirust mõõta stroboskoopilisel meetodil neoonlambi abil.
Mootori võlli otsa tõmmatakse kriidiga diametraalne joon. Mootori töötamise ajal valgustab seda neoonlamp, mis töötab mootoriga sama sagedusega võrgust. Vaatleja ei näe võlli otsas mitte joont, vaid tähte, mis pöörleb aeglaselt vastu võlli pöörlemissuunda. Tähe kiirte arv sõltub mootori pooluste arvust ja neoonlambi asendist. Kui lambi mõlema elektroodi valgus langeb võlli otsa, on nähtava tähe kiirte arv 2p. Kui võlli kriidijoonega ots on valgustatud ainult ühe elektroodiga, on valgusvihu kiirte arv. nähtav täht võrdub pooluste arvuga.
Stopperi poolt mõõdetud aja t (tavaliselt 30 s) jooksul loetakse nähtava tähe m kiirte arv, mis läbivad vertikaalasendit. Kuna nähtava tähe kiirte arv on 2p, siis libisemine
kus f1 on neoonlambi toitevõrgu sagedus.
F1 = 50 Hz juures.
Teine stroboskoopilise meetodi variant on järgmine. Üks ketastest on esiküljelt kinnitatud mootori võllile (joonis 2). Pange kett kokku (joonis 3). Bipolaarses masinas kinnitatakse võllile ketas märgistusega 2p = 2 ja seda valgustatakse plaastri elektroodiga neoonlambiga.

Riis. 2… Stroboskoopiliste ketaste kujutis sõltuvalt asünkroonmootori pooluste arvust
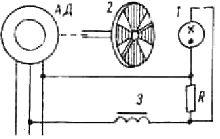
Riis. 3… Neoonlambi lülitusskeem stroboskoopilise libisemise tuvastamise meetodi jaoks: 1 — neoonlamp, 2 — stroboskoopketas, 3 — induktsioonmähis
Rootor pöörleb asünkroonselt ja jääb väljast maha, mistõttu on näha, et ketas pöörleb aeglaselt rootori pöörlemisele vastupidises suunas.Kui aja jooksul t m musta sektorit möödub statsionaarsest punktist (laagrile kinnitatud nool), annab libisemise väärtus avaldisega
Fikseeritud punkti läbivate sektorite loendamine ei tohiks alata hetkest, kui stopper käivitub, vaid järgmisest märgi ületamisest.
Terava pildi saamiseks tuleb lambile rakendada pinge, mille kõver on näidatud joonisel fig. 4... Lamp süttib, kui pinge selle klemmidel jõuab väärtuseni, mida nimetatakse süüteläviks.
Riis. 4... Skeem neoonlambi sisselülitamiseks terava pingega lainekuju saamiseks: 1 — neoonlamp; 2 — väga küllastunud magnetahelaga reaktiivne mähis induktiivse takistusega X (takistuste R ja X pingelang on ligikaudu sama).
Mootori libisemise määramine induktsioonpooli abil. See meetod põhineb rootori Fr dispersioonivoogude pöörlemissageduse jälgimisel (joonis 5), mis libisemisega võrdelise sagedusega läbivad induktsioonpooli pöördeid.
Riis. 5. Asünkroonse elektrimootori rootori libisemise mõõtmise skeem induktsioonmähise abil
Tundlik millivoltmeeter (soovitavalt nulliga skaala keskel) on ühendatud pooli klemmidega; mähis asub rootori võlli otsas. Pooli erinevates suundades keerates leiavad nad asukoha, kus vaadeldakse instrumendi noole maksimaalseid võnkumisi. Täielike võnkumiste arvust k ajahetkel t arvutatakse libisemise väärtus

ja f = 50 Hz.

Arvutamiseks on mugav loendada 50 täielikku võnkumist ja märkida aeg stopperi abil. Siis: .
Induktsioonmähisena saate kasutada releemähist või 10-20 tuhande pöördega alalisvoolukontaktorit (või kerida vähemalt 3000 pöördega mähist). Magnetvoo suurendamiseks sisestatakse mähisesse mitmest trafoterasest ribast valmistatud südamik. Induktsioonpooli meetod on väga lihtne ja sobib igat tüüpi masinatele.
Keritud rootoriga asünkroonmootorites saab lisaks ülalkirjeldatud meetoditele libisemist määrata ühe rootori faasiga ühendatud magnetoelektrilise ampermeetri abil ja mittelülitustakistuse olemasolul rootori ahelas ühendatud voltmeetriga rootori rõngaste külge. Soovitatav on kasutada kahepoolse skaalaga instrumente. Asünkroonmootori libisemine arvutatakse seadme nõela täielike võnkumiste arvu järgi, nagu ka asünkroonpooli meetodi kasutamisel.
