Kaasaegsed harjadeta alalisvoolumootorid
Tänu märkimisväärsetele edusammudele pooljuhtelektroonikas ja võimsate neodüümmagnetite loomise tehnoloogiale kasutatakse tänapäeval laialdaselt harjadeta alalisvoolumootoreid. Neid kasutatakse pesumasinates, tolmuimejates, ventilaatorites, droonides jne.
Ja kuigi idee harjadeta mootori tööpõhimõttest avaldati juba 19. sajandi alguses, ootas see tiibadesse kuni pooljuhtide ajastu alguseni, mil tehnoloogiad said valmis praktiliseks rakendamiseks. see huvitav ja tõhus kontseptsioon, mis võimaldas harjadeta alalisvoolumootoritel liikuda sama laialt kui tänapäeval. …
Ingliskeelses versioonis nimetatakse neid seda tüüpi mootoriteks BLDC mootor – harjadeta alalisvoolumootorid - harjadeta alalisvoolumootor. Mootori rootor sisaldab püsimagnetid, ja töömähised asuvad staatoril, see tähendab, et BLDC mootoriseade on täiesti vastupidine klassikalisele harjatud mootorile. BLDC mootorit juhib elektrooniline kontroller, mida nimetatakse ESC – elektrooniline kiiruseregulaator — elektrooniline püsikiiruse hoidja.
Elektrooniline regulaator ja kõrge efektiivsus
Elektrooniline regulaator võimaldab harjadeta mootorile tarnitavat elektrienergiat sujuvalt muuta. Erinevalt takistuslike kiirusregulaatorite lihtsamatest versioonidest, mis lihtsalt piiravad võimsust, ühendades takistusliku koormuse jadamisi mootoriga, mis muundab liigse võimsuse soojuseks, tagab elektrooniline kiiruse reguleerimine oluliselt suurema efektiivsuse ilma tarnitud elektrienergiat raiskamata.energiat tarbetuks kütmiseks. ..
Harjadeta alalisvoolumootorit võib klassifitseerida järgmiselt isesünkroonne sünkroonmootor, kus regulaarset hooldust vajav sädemesõlme on täielikult välja lülitatud — koguja… Kollektori funktsiooni võtab üle elektroonika, tänu millele on kogu toote disain oluliselt lihtsam ja kompaktsem.
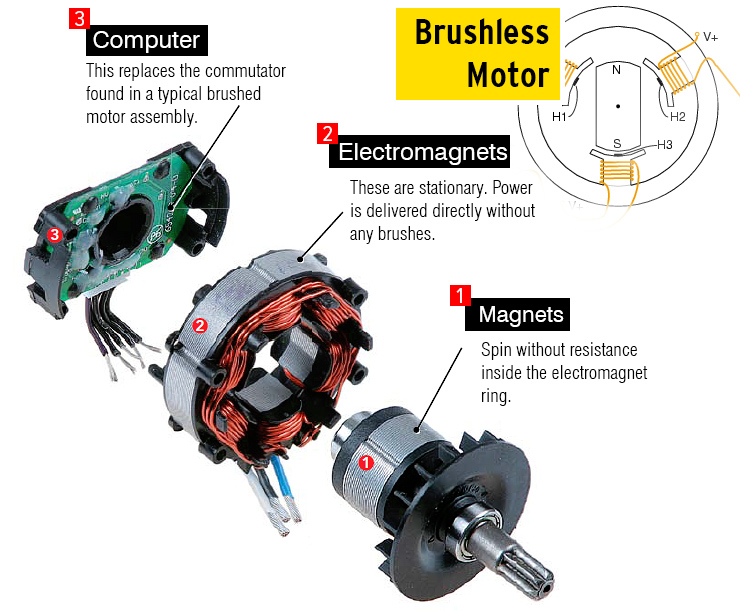
Harjad on tegelikult asendatud elektrooniliste lülititega, mille kaod on palju väiksemad kui mehaanilisel lülitamisel. Rootori võimsad neodüümmagnetid võimaldavad võllil suuremat pöördemomenti. Ja selline mootor soojeneb vähem kui kollektori eelkäija.
Selle tulemusena on mootori kasutegur parim ja võimsus kilogrammi kohta suurem, lisaks üsna lai rootori kiiruse reguleerimise vahemik ja tekitatud raadiohäirete peaaegu täielik puudumine. Struktuurselt on seda tüüpi mootorid kergesti kohandatavad töötama vees ja agressiivses keskkonnas.
Elektrooniline juhtseade on harjadeta alalisvoolumootori väga oluline ja kallis osa, kuid sellest ei saa loobuda.Sellelt seadmelt saab mootor võimsust, mille parameetrid mõjutavad samaaegselt nii kiirust kui ka võimsust, mida mootor koormuse all arendada suudab.
Isegi kui pöörlemiskiirust pole vaja reguleerida, on elektrooniline juhtseade ikkagi vajalik, sest see ei kanna mitte ainult juhtimisfunktsiooni, vaid sellel on ka toiteallika komponent. Võime öelda, et ESC on selle analoog sageduskontroller asünkroonsete vahelduvvoolumootorite jaoksspetsiaalselt ette nähtud harjadeta alalisvoolumootori toiteks ja juhtimiseks.
BLDC mootori juhtimine
Et mõista, kuidas BLDC mootorit juhitakse, tuletagem esmalt meelde, kuidas kommutaatormootor töötab. Selle keskmes raami pöörlemise põhimõte vooluga magnetväljas.
Iga kord, kui vooluga kaader pöörleb ja leiab tasakaaluasendi, muudab kommutaator (harjad, mis surutakse vastu kollektorit) raami läbiva voolu suunda ja raam jätkab. Seda protsessi korratakse, kui raam liigub poolusest poolusele. Ainult kollektori mootoris on selliseid raame palju ja magnetpooluste paari on mitu, mistõttu harjakollektor ei sisalda mitte kahte kontakti, vaid palju.
ECM teeb sama. See muudab magnetvälja polaarsuse niipea, kui rootor peab tasakaaluasendist ära pöörduma. Ainult juhtpinget ei anta mitte rootorile, vaid staatori mähistele ja seda pooljuhtlülitite abil õigel ajal (rootori faasid).
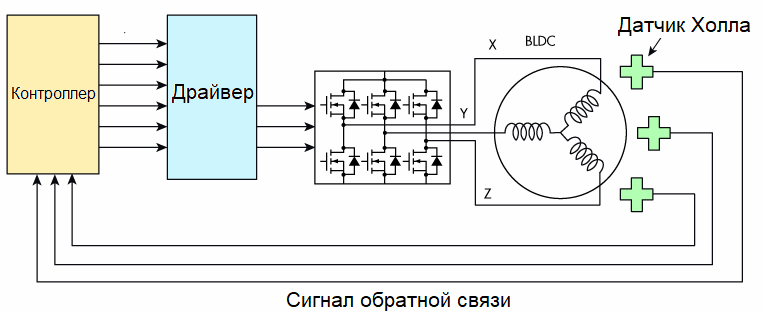
On ilmne, et harjadeta mootori staatori mähistele tuleb vool anda õigel ajal, st siis, kui rootor on teatud teadaolevas asendis. Selleks kasutage ühte järgmistest meetoditest.Esimene põhineb rootori asendianduril, teine on ühe mähise EMF mõõtmine, mis praegu ei saa toidet.
Andureid on erinevaid, magnetilisi ja optilisi, populaarseimad on magnetandurid Halli efekt… Teine meetod (põhineb elektromagnetväljade mõõtmisel), kuigi tõhus, ei võimalda täpset juhtimist madalatel kiirustel ja käivitamisel. Halli andurid seevastu tagavad täpsema juhtimise kõikides režiimides. Kolmefaasilistes BLDC mootorites on kolm sellist andurit.
Rootori asendiandurita mootoreid saab kasutada juhtudel, kui mootor käivitub ilma võlli koormuseta (ventilaator, propeller jne). Kui käivitamine toimub koormuse all, on vaja rootori asendianduritega mootorit. Mõlemal variandil on oma plussid ja miinused.
Anduriga lahendus muutub mugavamaks juhtimiseks, kuid kui vähemalt üks anduritest üles ütleb, tuleb mootor lahti võtta, lisaks vajavad andurid eraldi juhtmeid. Anduriteta versioonis pole spetsiaalseid juhtmeid vaja, kuid käivitamisel pöörleb rootor edasi-tagasi. Kui see on vastuvõetamatu, on vaja süsteemi paigaldada andurid.
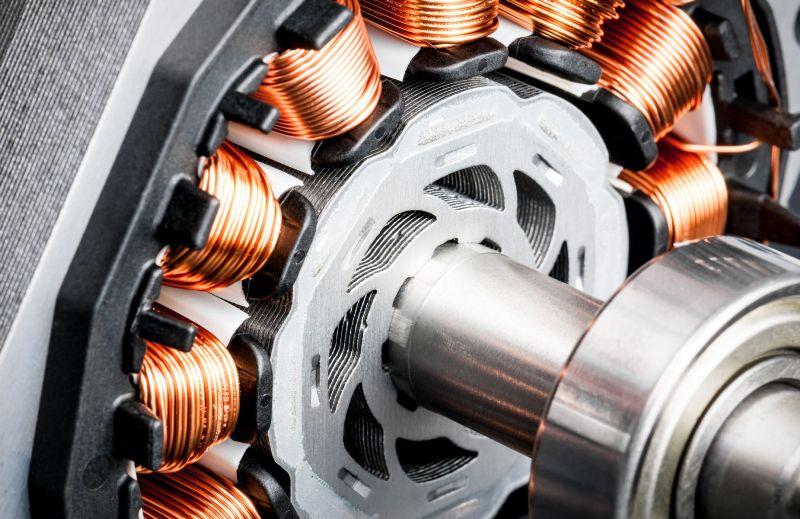
Rootor ja staator, faaside arv
BLDC mootori rootor võib olla vastavalt väline või sisemine ja staator sisemine või välimine. Staator on valmistatud magnetiliselt juhtivast materjalist, hammaste arv on täielikult jagatud faaside arvuga. Rootor võib olla valmistatud mitte tingimata magnetiliselt juhtivast materjalist, kuid tingimata magnetitega, mis on selle külge kindlalt kinnitatud.

Mida tugevamad on magnetid, seda suurem on saadaolev pöördemoment. Staatori hammaste arv ei tohiks olla võrdne rootori magnetite arvuga.Minimaalne hammaste arv on võrdne kontrollfaaside arvuga.
Enamik kaasaegseid harjadeta alalisvoolumootoreid on disaini ja juhtimise lihtsuse huvides kolmefaasilised. Nagu vahelduvvoolu asünkroonmootorites, on siin kolme faasi mähised ühendatud staatoriga "kolmnurga" või "tähega".
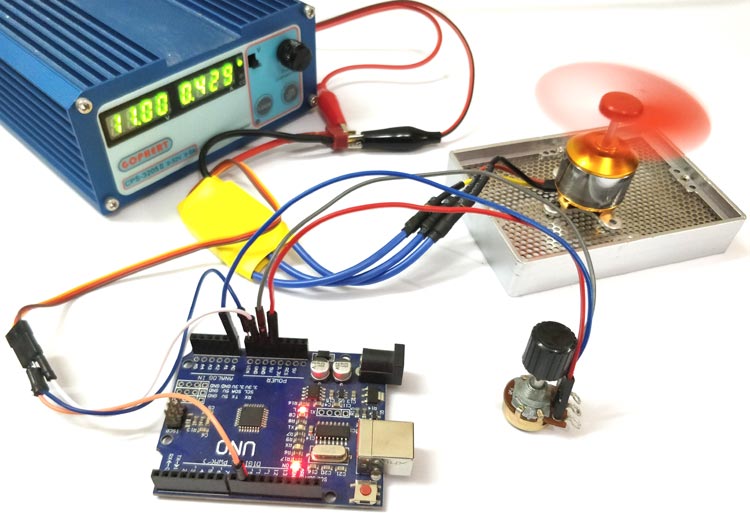
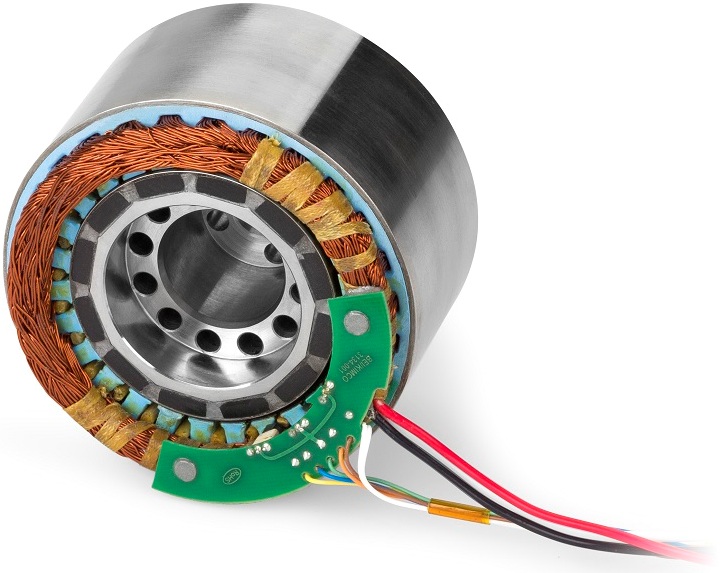
Sellistel ilma rootori asendiandurita mootoritel on 3 toitejuhet ja anduritega mootoritel 8 juhtmest: kaks lisajuhet andurite toiteks ja kolm andurite signaaliväljunditeks.
Madala kiirusega välisrootormootorid on valmistatud suure arvu poolustega (ja seega hammastega) faasi kohta, et saada pöörlemist, mille nurksagedus on oluliselt väiksem kui juhtvoolu sagedus. Kuid isegi kiirete kolmefaasiliste mootorite puhul ei kasutata tavaliselt alla 9 hammaste arvu.