Elektrimootori tööpõhimõte ja seade
Iga elektrimootor on ette nähtud mehaaniliste tööde tegemiseks, kuna kulub sellele rakendatud elektrienergia, mis tavaliselt muundatakse pöörlevaks liikumiseks. Kuigi tehnoloogias on mudeleid, mis loovad koheselt töökeha translatsioonilise liikumise. Neid nimetatakse lineaarmootoriteks.
Tööstusrajatistes käitavad elektrimootorid mitmesuguseid tehnoloogilises tootmisprotsessis osalevaid metallilõikepinke ja mehaanilisi seadmeid.
Kodumasinate sees töötavad elektrimootorid pesumasinaid, tolmuimejaid, arvuteid, fööne, laste mänguasju, kellasid ja paljusid muid seadmeid.

Põhilised füüsikalised protsessid ja toimepõhimõte
Sisse kolides magnetväli elektrilaengutel, mida nimetatakse elektrivooludeks, on alati mehaaniline jõud, mis kaldub nende suunda magnetvälja joonte orientatsiooniga risti olevas tasapinnas nihutama.Kui elektrivool läbib metalltraati või sellest valmistatud mähist, kipub see jõud liigutama/pöörlema iga voolu juhtivat juhet ja kogu mähist tervikuna.
Alloleval fotol on metallraam, mille kaudu voolab vool. Sellele rakendatav magnetväli tekitab raami iga haru jaoks jõu F, mis tekitab pöörleva liikumise.

See elektri- ja magnetenergia koostoime omadus, mis põhineb elektromotoorjõu loomisel suletud juhtivas ahelas, rakendub igale elektrimootorile. Selle disain sisaldab:
-
mähis, mille kaudu voolab elektrivool. See asetatakse spetsiaalsele ankrusüdamikule ja fikseeritakse pöördlaagritesse, et vähendada vastupidavust hõõrdejõududele. Seda konstruktsiooni nimetatakse rootoriks;
-
staator, mis loob magnetvälja, mis oma jõujoontega tungib mööda rootori mähise pöördeid läbivaid elektrilaenguid;
-
korpus staatori paigutamiseks. Kere sees on valmistatud spetsiaalsed istmed, mille sisse on paigaldatud rootori laagrite välimised puurid.
Lihtsaima elektrimootori lihtsustatud konstruktsiooni saab kujutada järgmise vormiga pildiga.

Rootori pöörlemisel tekib pöördemoment, mille võimsus sõltub seadme üldisest konstruktsioonist, rakendatud elektrienergia kogusest ja selle kadudest muundamisel.
Mootori maksimaalse võimaliku pöördemomendi võimsus on alati väiksem kui sellele rakendatav elektrienergia. Seda iseloomustab tõhususe väärtus.
Elektrimootorite tüübid
Mähiste kaudu voolava voolu tüübi järgi jaotatakse need alalis- või vahelduvvoolumootoriteks.Igal neist kahest rühmast on suur hulk modifikatsioone, mis kasutavad erinevaid tehnoloogilisi protsesse.
DC mootorid
Neil on staatori magnetväli, mis on loodud statsionaarse fikseeritud püsimagnetid või spetsiaalsed ergutuspoolidega elektromagnetid. Armatuuri mähis on kindlalt kinnitatud laagritesse kinnitatud võlli, mis võib vabalt ümber oma telje pöörata.
Sellise mootori põhistruktuur on näidatud joonisel.

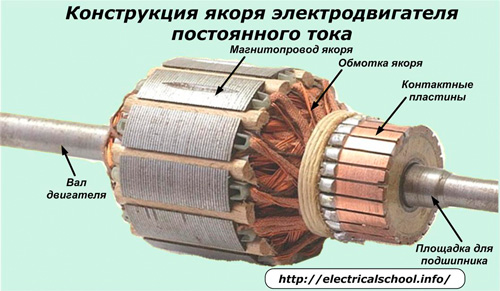
Armatuuri ferromagnetilistest materjalidest südamikul on kahest järjestikku ühendatud osast koosnev mähis, mis on ühest otsast ühendatud juhtivate kollektorplaatidega ja teisest otsast omavahel ühendatud. Kaks grafiitharja asetsevad armatuuri diametraalselt vastasotstes ja surutakse vastu kollektorplaatide kontaktpatju.
Positiivne alalisvooluallika potentsiaal rakendatakse alumisele mustriharjale ja negatiivne potentsiaal ülemisele. Pooli läbiva voolu suunda näitab katkendlik punane nool.
Voolu tõttu on magnetvälja põhjapoolus armatuuri alumises vasakus nurgas ja lõunapoolus armatuuri paremas ülanurgas (gimbali reegel). Selle tulemuseks on rootori pooluste tõrjumine samanimelistelt statsionaarsetelt ja staatori vastaspooluste külgetõmme. Rakendatava jõu tulemusena toimub pöörlev liikumine, mille suunda näitab pruun nool.
Armatuuri edasisel pöörlemisel inertsi abil kantakse poolused teistele kollektoriplaatidele. Voolu suund neis on vastupidine. Rootor jätkab pöörlemist.
Sellise kollektorseadme lihtne konstruktsioon põhjustab suuri elektrienergia kadusid.Sellised mootorid töötavad lihtsa disainiga seadmetes või lastele mõeldud mänguasjades.
Tootmisprotsessis osalevad alalisvoolu elektrimootorid on keerukama konstruktsiooniga:
-
mähis on jagatud mitte kaheks, vaid mitmeks osaks;
-
mähise iga sektsioon on paigaldatud oma vardale;
-
kollektorseade on valmistatud teatud arvu kontaktpadjadega vastavalt mähiste arvule.
Selle tulemusena tekib iga pooluse sujuv ühendus läbi selle kontaktplaatide harjade ja vooluallikaga ning vähenevad energiakadud.
Sellise ankru seade on näidatud fotol.
Alalisvoolumootorites saab rootori pöörlemissuunda ümber pöörata. Selleks piisab, kui muuta voolu liikumist mähises vastupidiseks, muutes allika polaarsust.
Vahelduvvoolu mootorid
Need erinevad eelmistest konstruktsioonidest selle poolest, et nende mähises voolavat elektrivoolu kirjeldatakse sinusoidse harmoonilise seadusperioodiliselt oma suunda muutes (märk). Nende toiteks antakse pinge vahelduvate märkidega generaatoritelt.
Selliste mootorite staatorit teostab magnetahel. See on valmistatud ferromagnetilistest plaatidest, millel on sooned, millesse mähise pöörded on paigutatud raami (mähise) konfiguratsiooniga.

Sünkroonsed elektrimootorid
Allolev foto näitab ühefaasilise vahelduvvoolumootori tööpõhimõtet koos rootori ja staatori elektromagnetväljade sünkroonse pöörlemisega.

Staatori magnetahela soontesse diametraalselt vastasotstes asetatakse mähised juhtmed, mis on skemaatiliselt näidatud raami kujul, mille kaudu voolab vahelduvvool.
Vaatleme ajahetke juhtumit, mis vastab selle poollaine positiivse osa läbimisele.
Laagrirakkudes pöörleb vabalt sisseehitatud püsimagnetiga rootor, milles on selgelt piiritletud pooluse põhjapoolne «N-suue» ja lõunapoolne «S-suu». Kui staatori mähist läbib voolu positiivne poollaine, tekib selles magnetväli poolustega «S st» ja «N st».
Rootori ja staatori magnetväljade vahel tekivad vastastikused jõud (poolused tõrjuvad ja erinevalt poolustest tõmbuvad kokku), mis kipuvad mootori armatuuri mis tahes asendist äärmusse pöörama, kui vastaspoolused asuvad üksteisele võimalikult lähedal. teine.
Kui vaatleme sama juhtumit, kuid hetkel, kui raami traati läbib vastupidine - negatiivne poollaine vool, siis toimub armatuuri pöörlemine vastupidises suunas.
Rootori pideva liikumise tagamiseks staatoris ei valmistata ühte mähisraami, vaid teatud arv neid, arvestades, et igaüks neist saab toite eraldi vooluallikast.
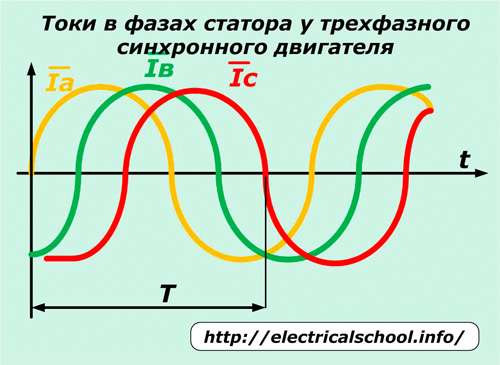
Sünkroonse pöörlemisega kolmefaasilise vahelduvvoolumootori tööpõhimõte, rootori ja staatori elektromagnetväljad on näidatud alloleval pildil.

Selles konstruktsioonis on staatori magnetahela sisse paigaldatud kolm mähist A, B ja C, mis on nihutatud üksteise suhtes 120-kraadise nurga all. Mähis A on märgitud kollaseks, B on roheline ja C on punane. Iga mähis on valmistatud samade raamidega nagu eelmisel juhul.
Pildil läbib vool igal juhul ainult ühe mähise edasi- või tagasisuunas, mida tähistavad märgid «+» ja «-«.
Kui positiivne poollaine läbib faasi A ettepoole, võtab rootorivälja telg horisontaalasendi, kuna sellel tasapinnal moodustuvad staatori magnetpoolused ja tõmbavad liikuvat armatuuri. Rootori vastaspoolused kipuvad lähenema staatori poolustele.
Kui positiivne poollaine läheb faasi C, pöörleb armatuur 60 kraadi päripäeva. Kui faasile B on rakendatud voolu, toimub sarnane armatuuri pöörlemine. Iga järgnev vooluvool järgmise mähise järgmises faasis pöörab rootorit.
Kui igale mähisele rakendatakse 120-kraadise nurga võrra nihutatud kolmefaasilist võrgupinget, siis ringlevad neis vahelduvvoolud, mis pööravad armatuuri ja loovad selle sünkroonse pöörlemise rakendatava elektromagnetväljaga.
Sama mehaanilist konstruktsiooni kasutatakse edukalt kolmefaasilises samm-mootoris... Ainult igas mähises juhtimisega spetsiaalne kontroller (sammumootori juht) Pidevad impulsid rakendatakse ja eemaldatakse vastavalt ülalkirjeldatud algoritmile.
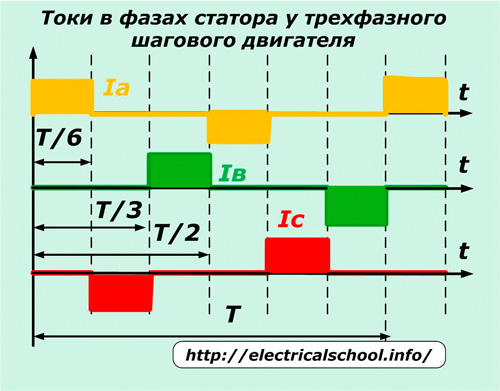
Nende käivitamine käivitab pöörleva liikumise ja nende lõpetamine teatud ajahetkel annab võlli mõõdetud pöörlemise ja peatamise programmeeritud nurga all teatud tehnoloogiliste toimingute tegemiseks.
Mõlemas kirjeldatud kolmefaasilises süsteemis on võimalik muuta armatuuri pöörlemissuunda. Selleks peate lihtsalt muutma faaside jada "A" - "B" - "C" teiseks, näiteks "A" - "C" - "B".
Rootori kiirust reguleerib perioodi T pikkus. Selle vähendamine toob kaasa pöörlemise kiirenemise.Voolu amplituudi suurus faasis sõltub mähise sisetakistusest ja sellele rakendatava pinge väärtusest. See määrab elektrimootori pöördemomendi ja võimsuse.
Asünkroonsed mootorid
Nendel mootorikonstruktsioonidel on sama mähistega staatori magnetahel nagu eelnevalt käsitletud ühefaasilistel ja kolmefaasilistel mudelitel. Nad on oma nime saanud armatuuri ja staatori elektromagnetväljade asünkroonse pöörlemise järgi. Seda tehakse rootori konfiguratsiooni parandamisega.
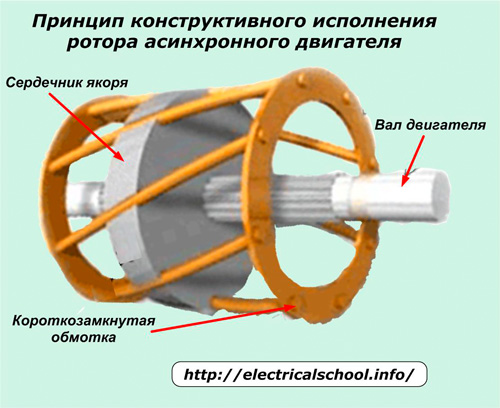
Selle südamik on valmistatud soonega elektrilistest terasplaatidest. Need on varustatud alumiiniumist või vasest voolujuhtmetega, mis suletakse armatuuri otstes juhtivate rõngastega.
Kui staatori mähistele rakendatakse pinget, indutseeritakse rootori mähises elektromotoorjõu toimel elektrivool ja tekib armatuuri magnetväli. Kui need elektromagnetväljad interakteeruvad, hakkab mootori võll pöörlema.
Selle konstruktsiooni korral on rootori liikumine võimalik alles pärast pöörleva elektromagnetvälja tekkimist staatoris ja see jätkub sellega asünkroonses töörežiimis.
Asünkroonmootorid on disainilt lihtsamad, seetõttu on need odavamad ning neid kasutatakse laialdaselt tööstusrajatistes ja kodumasinates.

ABB plahvatuskindel elektrimootor
Lineaarmootorid
Paljud tööstuslike mehhanismide töökehad teostavad ühes tasapinnas edasi-tagasi või translatsioonilist liikumist, mis on vajalik metallitöötlemismasinate, sõidukite tööks, vaiade löömisel vasaralöökide ...
Sellise töökorpuse liigutamine käigukastide, kuulkruvide, rihmaajamite ja sarnaste mehaaniliste seadmete abil pöörlevast elektrimootorist muudab konstruktsiooni keerulisemaks. Selle probleemi kaasaegne tehniline lahendus on lineaarse elektrimootori töö.
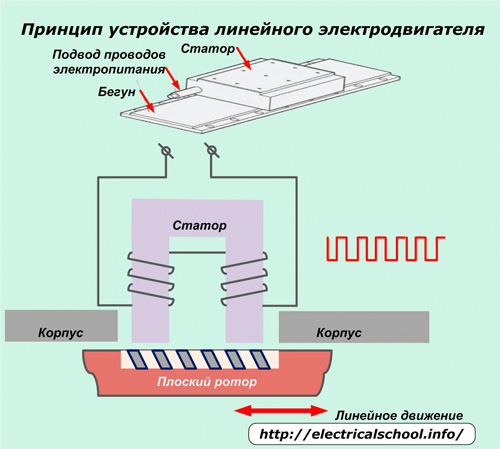
Selle staator ja rootor on piklikud ribadena, mitte rõngasteks keritud, nagu pöörlevate elektrimootorite puhul.
Tööpõhimõte on anda jooksuri rootorile lineaarne edasi-tagasi liikumine, mis on tingitud elektromagnetilise energia ülekandest statsionaarselt staatorilt, millel on teatud pikkusega avatud magnetahel. Selle sees luuakse voolu järjestikuse sisselülitamise teel töötav magnetväli.
See toimib kollektoriga armatuuri mähisele. Sellises mootoris tekkivad jõud liigutavad rootorit ainult lineaarselt piki juhtelemente.
Lineaarmootorid on ette nähtud töötama alalis- või vahelduvvoolul ning võivad töötada sünkroon- või asünkroonrežiimis.
Lineaarmootorite puudused on järgmised:
-
tehnoloogia keerukus;
-
kõrge hind;
-
madal energiatõhusus.