Elektroonilised generaatorid
 Generaatorid on elektroonilised seadmed, mis muudavad alalisvooluallika energia vajaliku sageduse ja võimsusega erineval kujul vahelduvvooluenergiaks (elektromagnetvõnkudeks).
Generaatorid on elektroonilised seadmed, mis muudavad alalisvooluallika energia vajaliku sageduse ja võimsusega erineval kujul vahelduvvooluenergiaks (elektromagnetvõnkudeks).
Raadioringhäälingus, meditsiinis, radaris kasutatavad elektroonilised generaatorid on osa analoog-digitaalmuunduritest, mikroprotsessorsüsteemidest jne.
Ükski elektrooniline süsteem pole täielik ilma sisemiste või väliste generaatoriteta, mis määravad selle töötempo. Põhinõuded generaatoritele — vibratsioonisageduse stabiilsus ja võimalus neilt signaale edasiseks kasutamiseks eemaldada.
Elektrooniliste generaatorite klassifikatsioon:
1) vastavalt väljundsignaalide kujule:
— siinussignaalid;
— ristkülikukujulised signaalid (multivibraatorid);
— lineaarselt varieeruvad pingesignaalid (CLAY) või neid nimetatakse ka saehamba pingegeneraatoriteks;
— erikujulised signaalid.
2) tekitatud võnkumiste sagedusest (tinglikult):
— madalsagedus (kuni 100 kHz);
— kõrge sagedus (üle 100 kHz).
3) ergutusmeetodil:
— sõltumatu (välise) ergutusega;
— iseergastusega (autogeneraatorid).
Autogeneraator — ilma välismõjuta iseergastuv generaator, mis muundab energiaallikate energia pidevaks vibratsiooniks, näiteks vibratsiooniahelaks.

Joonis 1 – generaatori plokkskeem
Elektrooniliste generaatorite ahelad (joonis 1) on ehitatud samade skeemide järgi nagu võimendid, ainult generaatoritel puudub sisendsignaali allikas, see asendatakse positiivse tagasiside signaaliga (PIC). Tuletame meelde, et tagasiside on osa väljundsignaali ülekandmine sisendahelasse. Vajaliku lainekuju tagab tagasisideahela struktuur. Võnkesageduse seadistamiseks on OS-ahelad ehitatud LC- või RC-ahelatele (sagedus määrab kondensaatori laadimisaja).
PIC-ahelas genereeritud signaal suunatakse võimendi sisendisse, võimendatakse teguriga K ja saadetakse väljundisse. Sel juhul suunatakse osa väljundi signaalist PIC-ahela kaudu sisendisse, kus see nõrgeneb teguri K võrra, mis võimaldab säilitada generaatori väljundsignaali konstantset amplituudi.
Sõltumatu välisergutusega ostsillaatorid (selektiivvõimendid) on vastava osavahemikuga võimsusvõimendid, mille sisendiks on elektrisignaal ostsillaatorilt. Need. võimendatakse ainult teatud sagedusriba.
RC generaatorid
Madalsageduslike generaatorite loomiseks kasutatakse tavaliselt operatiivvõimendeid, näiteks PIC-ahelat, RC-ahelad paigaldatakse, et tagada sinusoidsete võnkumiste antud sagedus f0.
RC-ahelad on sagedusfiltrid – seadmed, mis edastavad signaale teatud sagedusvahemikus ja ei liigu valesse vahemikku.Sellisel juhul suunatakse võimendi läbi tagasisideahela tagasi võimendi sisendisse, mis tähendab, et võimendatakse ainult teatud sagedust või sagedusriba.
Joonisel 2 on näidatud peamised sagedusfiltrite tüübid ja nende sageduskarakteristik (AFC). Sageduskarakteristik näitab filtri ribalaiust sageduse funktsioonina.
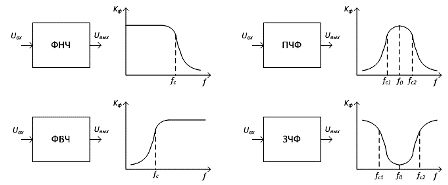
Joonis 2 – Sagedusfiltrite tüübid ja nende sageduskarakteristik
Filtrite tüübid:
— madalpääsfiltrid (LPF);
— kõrgpääsfiltrid (HPF);
— ribapääsfiltrid (BPF);
— blokeerimissagedusfiltrid (FSF).
Filtreid iseloomustab piirsagedus fc, millest kõrgemal või madalamal on signaali järsk sumbumine.Pääsribadele ja hülgamisfiltritele on iseloomulik ka IFP (RFP non-pass) ribalaius.
Joonisel 3 on kujutatud sinusoidse generaatori diagramm. Nõutav võimendus määratakse takistite R1, R2 OOS-ahela abil. Sel juhul on PIC-ahel ribapääsfilter. Resonantssagedus f0 määratakse järgmise valemiga: f0 = 1 / (2πRC)
Tekkivate võnkumiste sageduse stabiliseerimiseks kasutatakse sageduse häälestusahelana kvartsresonaatoreid. Kvartsresonaator on õhuke mineraalplaat, mis on paigaldatud kvartsihoidikusse. Nagu teate, on kvartsil piesoelektriline efekt, mis võimaldab seda kasutada süsteemina, mis on samaväärne elektrilise võnkeahelaga ja millel on resonantsomadused. Kvartsplaatide resonantssagedused ulatuvad mõnest kilohertsist kuni tuhandeteni MHz, kusjuures sageduse ebastabiilsus on tavaliselt suurusjärgus 10-8 ja alla selle.
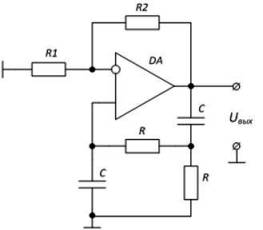
Joonis 3 – RC siinuslaine generaatori skeem
Multivibraatorid on elektroonilised generaatorid ruutlaine signaalid.
Multivibraator täidab enamikul juhtudel põhiostsillaatori funktsiooni, mis genereerib impulsside või digitaalse tegevussüsteemi järgmiste sõlmede ja plokkide jaoks käivitussisendi impulsse.
Joonisel 4 on näidatud IOU-põhise sümmeetrilise multivibraatori diagramm. Sümmeetriline — ristkülikukujulise impulsi impulsi aeg võrdub pausiajaga tpause = tpause.
IOU on kaetud positiivse tagasisidega — vooluahel R1, R2, mis toimivad kõigil sagedustel võrdselt. Pinge mittepainduvas sisendis on konstantne ja sõltub takistite R1, R2 takistusest. Multivibraatori sisendpinge genereeritakse OOS-i abil läbi RC-ahela.
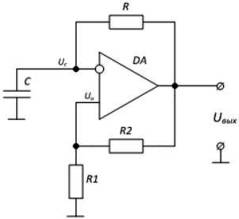
Joonis 4 – sümmeetrilise multivibraatori skeem
Väljundpinge tase muutub + Usat väärtusest -Us ja vastupidi.
Kui väljundpinge Uout = + Usat, on kondensaator laetud ja inverteerivale sisendile mõjuv pinge Uc kasvab eksponentsiaalselt (joon. 5).
Võrdsuse Un = Uc korral toimub väljundpinge Uout = -Us järsk muutus, mis toob kaasa kondensaatori ülelaadimise. Võrdsuse -Un = -Uc saavutamisel muutub Uout olek uuesti. Protsessi korratakse.
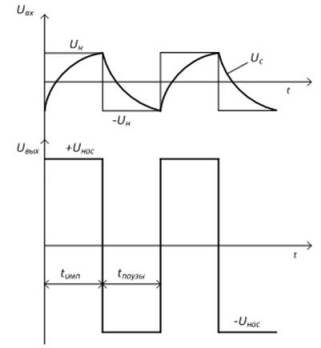
Joonis 5. Multivibraatori töö ajastusskeemid
RC-ahela ajakonstandi muutmine toob kaasa muutuse kondensaatori laadimis- ja tühjenemisaeg, ja sellest ka multivibraatori võnkesagedus. Lisaks sõltub sagedus PIC parameetritest ja määratakse järgmise valemiga: f = 1 / T = 1 / 2t ja = 1 / [2 ln (1 + 2 R1 / R2)]
Kui on vaja saada asümmeetrilisi ristkülikukujulisi võnkumisi t ja ≠ tp korral, kasutatakse asümmeetrilisi multivibraatoreid, milles kondensaatorit laetakse erinevate ajakonstantidega erinevates ahelates.
Üks vibraator (ootel multivibraatorid) on ette nähtud vajaliku kestusega ristkülikukujulise pingeimpulsi moodustamiseks, kui see puutub kokku lühikese päästikuimpulsiga sisendis. Monovibraatoreid nimetatakse sageli elektroonilisteks viitereleedeks.
Tehnilises kirjanduses on rohkem. ühe löögi nimi on ootav multivibraator.
Monovibraatoril on üks pikaajaline püsiseisund, tasakaal, milles ta on enne päästikuimpulsi rakendamist. Teine võimalik olek on ajutiselt stabiilne. Univibraator siseneb sellesse olekusse päästikuimpulsi toimel ja võib selles olla piiratud aja tv, misjärel naaseb automaatselt algolekusse.
Ühekordsete seadmete peamised nõuded on väljundimpulsi kestuse stabiilsus ja selle algoleku stabiilsus.
Lineaarsed pingegeneraatorid (CLAY) moodustavad perioodilisi signaale, mis muutuvad lineaarselt (saehambaimpulsid).
Saehamba impulsse iseloomustavad töökäigu kestus tp, tagasilöögi kestus ja amplituud Um (joonis 6, b).
Pinge lineaarse sõltuvuse loomiseks ajast kasutatakse kõige sagedamini konstantse vooluga kondensaatori laadimist (või tühjendamist). SAVI lihtsaim skeem on näidatud joonisel 6, a.
Kui transistor VT on suletud, laetakse kondensaatorit C2 toiteallika Up kaudu takisti R2 kaudu. Sel juhul suureneb pinge kondensaatoris ja seega ka väljundis lineaarselt.Kui baasi saabub positiivne impulss, avaneb transistor ja kondensaator tühjeneb kiiresti oma madala takistuse kaudu, mis tagab väljundpinge kiire vähenemise nullini ja vastupidi.
SAVI kasutatakse kineskoopseadmete kiirskaneerimisseadmetes, analoog-digitaalmuundurites (ADC) ja muudes konversiooniseadmetes.
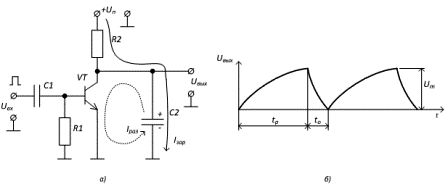
Joonis 6 — a) Lihtsaim skeem lineaarselt muutuva pinge moodustamiseks b) Trioonimpulsside ajadiagramm.