Asünkroonmootori mehaanilised omadused erinevatel režiimidel, pingetel ja sagedustel
 Asünkroonmootorite mehaanilisi omadusi saab väljendada n = f (M) või n=e (I). Asünkroonmootorite mehaanilisi omadusi väljendatakse aga sageli sõltuvuse kujul M = f(S), kus C — libisemine, S = (nc-n) / nc, kus ns — sünkroonkiirus.
Asünkroonmootorite mehaanilisi omadusi saab väljendada n = f (M) või n=e (I). Asünkroonmootorite mehaanilisi omadusi väljendatakse aga sageli sõltuvuse kujul M = f(S), kus C — libisemine, S = (nc-n) / nc, kus ns — sünkroonkiirus.
Praktikas kasutatakse mehaaniliste omaduste graafiliseks konstrueerimiseks lihtsustatud valemit, mida nimetatakse Klossi valemiks:

siin: Mk — kriitiline (maksimaalne) pöördemomendi väärtus. See momendi väärtus vastab kriitilisele libisemisele

kus λm = Mk / Mn
Klossi valemit kasutatakse asünkroonmootori abil teostatava elektriajamiga seotud probleemide lahendamiseks. Klossi valemi abil saate asünkroonmootori passiandmete järgi koostada mehaaniliste omaduste graafiku. Praktiliste arvutuste jaoks tuleks juureeelse kriitilise hetke määramisel arvestada valemis ainult plussmärki.
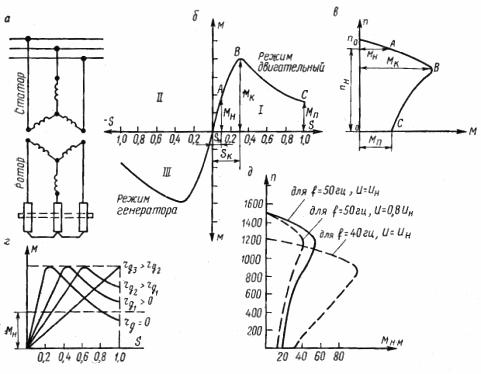
Riis. 1.Asünkroonmootor: a — skemaatiline diagramm, b — mehaaniline karakteristik M = f (S) — loomulik mootori- ja generaatorirežiimis, c — loomulik mehaaniline karakteristik n = f (M) mootorirežiimis, d — tehisreostaadi mehaanilised omadused, e — erinevate pingete ja sageduste mehaanilised omadused.

Oravapuuri asünkroonmootor
Nagu näha jooniselt fig. 1, I ja III kvadrandis asuva asünkroonmootori mehaanilised omadused. I kvadrandis olev kõvera osa vastab positiivsele libisemisväärtusele ja iseloomustab asünkroonmootori töörežiimi ning III kvadrandis generaatori režiimi. Suurimat praktilist huvi pakub mootorirežiim.
Mootorirežiimi mehaaniliste omaduste graafik sisaldab kolme iseloomulikku punkti: A, B, C ja selle saab tinglikult jagada kaheks osaks: OB ja BC (joonis 1, c).
Punkt A vastab mootori nimipöördemomendile ja määratakse valemiga Mn = 9,55•103•(Strn /nn)
See hetk vastab nominaalne libisemine, mis üldise tööstusliku kasutusega mootorite puhul on väärtus vahemikus 1–7%, st Sn = 1–7%. Samas on väikestel mootoritel rohkem libisemist ja suurtel vähem.
Kõrge libisemisega mootoritel, mis on mõeldud löökkoormuseks, on Сn~15%. Nende hulka kuuluvad näiteks ühe seeria vahelduvvoolumootorid.
Karakteristiku punkt C vastab mootori võllil käivitamisel esinevale algsele pöördemomendi väärtusele. Seda hetke Mp nimetatakse algus- või alguseks. Sel juhul on libisemine võrdne ühtsusega ja kiirus on null. Käivitusmoment seda on lihtne kindlaks teha võrdlustabeli andmete põhjal, mis näitavad käivitusmomendi ja nimiväärtuse Mp / Mn suhet.
Käivitusmomendi suurus pinge ja voolu sageduse konstantsetel väärtustel sõltub rootori ahela aktiivsest takistusest. Sel juhul suureneb algselt aktiivse takistuse suurenedes käivitusmomendi väärtus, saavutades maksimumi, kui rootori ahela aktiivne takistus on võrdne mootori kogu induktiivtakistusega. Seejärel, kui rootori aktiivtakistus suureneb, algpöördemomendi väärtus väheneb, kaldudes piirväärtuses nullini.
Punkt C (joonis 1, b ja c) vastab maksimaalsele momendile, mis suudab mootorit arendada kogu pöörete vahemikus n = 0 kuni n = ns... Seda momenti nimetatakse kriitiliseks (või ümbermineku) momendiks Mk . Kriitiline moment vastab ka kriitilisele libisemisele Sk. Mida väiksem on kriitilise libisemise Sk väärtus, samuti nimilibisemise Сn väärtus, seda suurem on mehaaniliste karakteristikute jäikus.
Algus- ja kriitilised hetked määratakse nominaalsete hetkede järgi. Vastavalt GOST-ile oravapuuriga mootoriga elektrimasinate jaoks peab olema täidetud tingimus Mn / Mn = 0,9 - 1,2, Mk / Mn = 1,65 - 2,5.
Tuleb märkida, et kriitilise momendi väärtus ei sõltu rootori ahela aktiivsest takistusest, samas kui kriitiline libisemine Сk on selle takistusega otseselt võrdeline.See tähendab, et rootori ahela aktiivse takistuse suurenemisega jääb kriitilise momendi väärtus muutumatuks, kuid pöördemomendi kõvera maksimum nihkub libisemisväärtuste suurenemisele (joonis 1, d).
Kriitilise pöördemomendi suurus on otseselt võrdeline staatorile rakendatud pinge ruuduga ja pöördvõrdeline staatori pingete sageduse ja voolu sageduse ruuduga.
Kui näiteks mootorile antav pinge on 85% nimiväärtusest, on kriitilise pöördemomendi suurus nimipingel 0,852 = 0,7225 = 72,25% kriitilisest pöördemomendist.
Sageduse muutmisel täheldatakse vastupidist. Kui näiteks mootorile, mis on kavandatud töötama voolusagedusega = 60 Hz, toitevool sagedusega = 50 Hz, saabub kriitiline moment (60/50)2 = 1,44 korda suurem kui ametlik väärtus selle sagedus (joon. 1, e).
Kriitiline moment iseloomustab mootori hetkelist ülekoormusvõimet ehk näitab, millisele ülekoormusmomendile (mõne sekundiga) suudab mootor vastu pidada ilma kahjulike tagajärgedeta.

Mehaanilise karakteristiku lõiku nullist maksimaalse (kriitilise) väärtuseni (vt joonis 1, biv) nimetatakse karakteristiku stabiilseks osaks ja lõiku BC (joonis 1, c) - ebastabiilseks osaks.
Selline jaotus on seletatav asjaoluga, et OF karakteristikute suureneval osal libisemisega, s.o. kiiruse vähenedes suureneb mootori poolt arendatud pöördemoment.See tähendab, et koormuse kasvades ehk pidurdusmomendi kasvades mootori pöörlemiskiirus väheneb ja sellega suurendatud pöördemoment suureneb. Kui koormus väheneb, siis vastupidi, kiirus suureneb ja pöördemoment väheneb. Kui koormus muutub karakteristiku stabiilse osa vahemikus, muutuvad mootori pöörlemiskiirus ja pöördemoment.
Mootor ei saa arendada rohkem kui kriitiline pöördemoment ja kui pidurdusmoment on suurem, peab mootor paratamatult seisma. Mootori ümberminek juhtub, nagu öeldakse.
Mehhaanilist karakteristikku konstantse U ja I juures ning täiendava takistuse puudumist rootori ahelas nimetatakse loomulikuks karakteristikuks (iseloomulik keritud rootoriga oravapuuriga asünkroonmootorile, millel pole rootoriahelas täiendavat takistust). Kunstlikke või reostaatilisi omadusi nimetatakse neid, mis vastavad rootori ahela täiendavale takistusele.
Kõik käivitusmomendi väärtused on erinevad ja sõltuvad rootori ahela aktiivsest takistusest. Erineva suurusega liugurid vastavad samale nimipöördemomendile Mn. Rootori ahela takistuse suurenedes suureneb libisemine ja seetõttu väheneb mootori kiirus.
Aktiivse takistuse kaasamise tõttu rootori ahelasse on stabiilses osas mehaaniline karakteristik venitatud libisemise suurenemise suunas, mis on võrdeline takistusega.See tähendab, et mootori kiirus hakkab olenevalt võlli koormusest oluliselt muutuma ja kõvakarakteristikud muutuvad pehmeks.