Elektriline käruvedu koos sildkraanadega
Sildkraanaga käru on tõsteseadme iseseisev element ja on ette nähtud koormate teisaldamiseks siltkraana ulatuses tehnoloogiliselt määratud liikumiskiiruse ja veose positsioneerimise vajaliku täpsusega. Pöördvankri ajam on üks peamisi kraanaseadmete komponente.
Käru liigub sildkraana rajal. Sild ise liigub vankri liikumissuunaga risti. Kärule on paigaldatud tõstemehhanism, mis on varustatud konksuga (või elektromagnetiga), millega saab koormat liigutada. Pöördvankri liikumine on sildkraana tehnoloogilise tsükli lahutamatu osa (joonis 1).
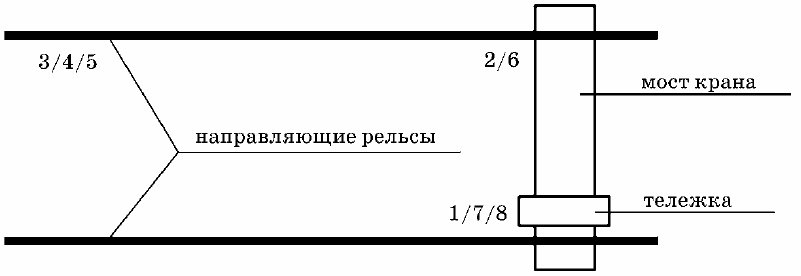
Riis. 1. Skeem sildkraanaga toimingute tegemiseks töötsüklis
See tsükkel koosneb järgmistest toimingutest (joonisel 1 on toimingute numbrid näidatud numbritega):
1 — koorma tõstmine;
2 — vankri liigutamine etteantud asendisse;
3 — kraana viimine etteantud asendisse;
4 — koorma kaalu vähendamine;
5 — konksu tõstmine koorma raskusega;
6 — kraana viimine algasendisse;
7 — käru liigutamine algasendisse;
8 — konksu langetamine.
Nagu sildkraana protsessitsüklist näha, lülitatakse käru ajami mootor sisse teises ja seitsmendas toimingus. Kui pöördvanker läheneb sildkraana kaugusel etteantud asendile, pidurdatakse pöördvankri ajami elektrimootor elektriliselt, et tagada vajalik pidurdustäpsus.
Seejärel lülitatakse mootor välja ja rakendatakse mehaaniline pidur. Lisaks lülitatakse sisse silla liikumise elektriajam ja koorem liigub mööda töökoda vastavalt tehnoloogilisele ülesandele. Määratud kohta jõudes kraana peatub, koorem langetatakse ja seejärel viiakse läbi vajalikud tehnoloogilised toimingud.

Vankri liikumismehhanismi kinemaatiline skeem sildkraanadega on näidatud joonisel 2. Käru liikumismehhanism on valmistatud skeemi järgi, mille keskel on veorataste vahel käigukast.
Jõud elektrimootorilt D edastatakse piduriketta T, käigukasti P, sidurite M ja võllide B kaudu jooksvatele ratastele. Käru paigal hoidmiseks kasutatakse piduriratast.
Kärul on neli sõiduratast ja kaks veoratast. Kraanakärude sõidurattad on tavaliselt valmistatud kahe ribiga.
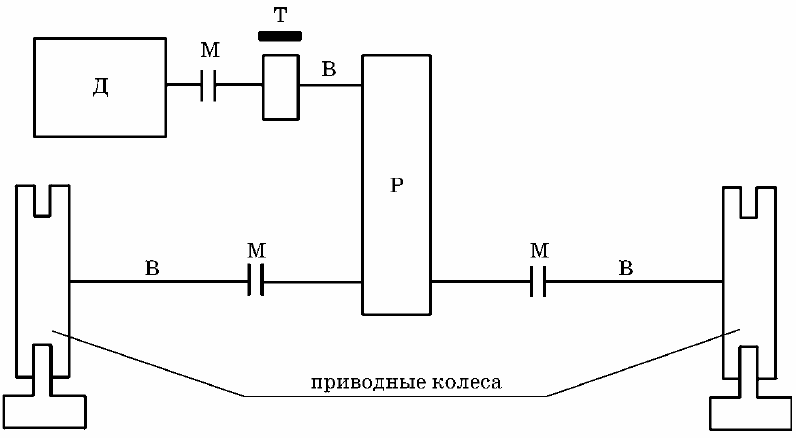
Riis. 2. Käru liikumismehhanismi kinemaatiline diagramm
Aeg, mis kulub käru määratud asendisse, määratakse kindlaks, võttes arvesse vankri kiirendamiseks ja aeglustamiseks kuluvat aega vajaliku kiirendusega.Lähtuvalt tehnoloogilise protsessi tingimustest peaks käru teisaldamisel olev tahhogramm olema joonisel 3 näidatud kujul.
Vajalik on tagada pöördvankri mehhanismi sujuv käivitamine etteantud kiiruseni vajaliku kiirendusega. Vajaliku positsioneerimistäpsuse tagamiseks on vajalik elektriajami sujuv aeglustamine koos üleminekuga vähendatud kiirusele, mille järel käru peatub.
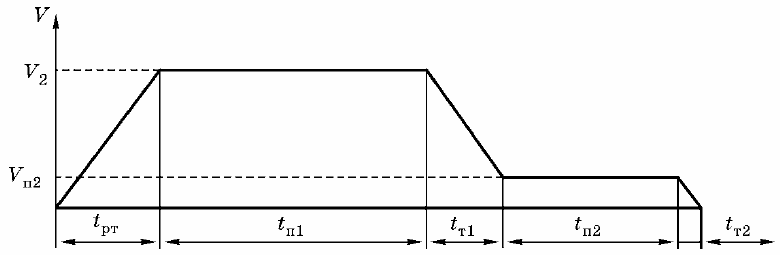
Riis. 3. Käru liikumismehhanismi sõidumeerik
Pöördvankri liikumine koos löökidega metallkonstruktsioonile rööpa ühenduskohtades, intensiivne kiirendus ja aeglustus, metallkonstruktsiooni loomulik vibratsioon masinate koormamisel põhjustavad väga intensiivseid mehaanilisi mõjusid sildkraana pöördvankril paiknevatele elektriseadmetele. Sellest lähtuvalt peab käru liigutamiseks mõeldud elektriajam vastama järgmistele nõuetele:
1) elektriajam peab võimaldama käivitada mehhanismi liikumises, muuta liikumissuunda ja peatada mehhanism vajaliku kiirenduse (m / s2) ja õige positsioneerimistäpsusega (mm);
2) elektriajam peab tagama sujuva kiiruse reguleerimise peavoolust allapoole;
3) välja töötatud mootori pöördemoment peab tagama mehhanismi töö etteantud intensiivsusega;
4) teatud mootorikäivituste arvul tunnis ei tohiks olla selle mähiste ülekuumenemist, mille tõttu on võimalik mehhanismi pikaajaline seiskumine;
5) mootor peab olema valitud vastavalt töötingimustele ehk sobiva konstruktsiooniga ning selle mähised kuumakindlad ja niiskuse eest isolatsiooniga;
6) ajamimootoril peavad olema väikseimad hooratta massid, millel on oluline mõju siirdevoolule sagedaste sõidukäivituste korral;
7) ajami mootor peab vastama töömehhanismi võimsusele ja omama vajalikku ülekoormusvõimet;
8) elektriajam peab tagama minimaalse kestusega siirdeprotsesside tekke;
9) elektriajami projekteerimisel tuleb arvestada ohutuse ja hooldamise lihtsusega.

Tootmisrajatise horisontaalsel rööbasteel töötavate liikumismehhanismide staatiline moment tekib laagrites tekkivate libisevate hõõrdejõudude ja sildkraana rööbastel veerevate pöördvankrite rataste veeremishõõrdumisega. Mehhanismi staatilise momendi käru edasiliikumise ajal määrab kraana tõstevõime. Mehhanismi staatiline moment pöördvankri tagurpidi liikumise ajal arvutatakse mittetäieliku koormuse korral.
Silmakraanade käru elektriliseks ajamiks, asünkroonsete oravpuuriga rootormootorite (sh muutuva sagedusega ajami osana), keritud rootori asünkroonmootorid ja sõltumatult ergastavad alalisvoolumootorid.