Täiturid valukodade automaatikasüsteemides
Automaatsete protsessijuhtimissüsteemide täiturmehhanismid on ette nähtud kontrollitava objekti või selle juhtimisseadmete otseseks mõjutamiseks.
Nõuded
Draivid peavad vastama järgmistele nõuetele:
-
neil on võimalikult lineaarsed staatilised omadused;
-
omama piisavat võimsust juhtobjekti või selle organite liikuma panemiseks kõigil töörežiimidel;
-
omama nõutavat jõudlust;
-
tagada toodangu väärtuse kõige lihtsam ja säästlikum reguleerimine;
-
on madala roolivõimega.
Omadused valukodades töötamisel

Valuprotsesside automatiseerimissüsteeme iseloomustab kahe juhtimisrežiimi olemasolu: kaug- ja automaatne.
Kaugjuhtimissüsteemide ajamite puhul on peamised näitajad energia, lisaks on vaja töö-, struktuuri- ja majandusomadusi.
Automaatjuhtimissüsteemide ajamite puhul on kõige olulisemad nende staatilised ja dünaamilised omadused, mis mõjutavad reguleerimise stabiilsust ja kvaliteeti. Neid täiturmehhanismide valiku omadusi valuprotsesside automatiseerimissüsteemides tuleb nende projekteerimisel arvesse võtta.
Ajamite (kaugjuhtimispuldi) peamised energiaparameetrid on nimimoment (nimijuhtseadmel tekkiv jõud) ja käivitusmoment (nimijuhtsignaali toimel sisselülitamise hetkel tekkiv jõud).
Käivitusmomendi ja ajami vähendatud inertsmomendi suhe määrab selle inertsi, see tähendab aja liikumise algusest kuni väljundelemendi nominaalse liikumiskiiruseni püsiolekus. Kiirendusaja vähendamiseks ei tohiks käivitusmoment ületada 2–2,5 nimimomenti.

Positsioonijuhtimissüsteemides, kus juhtimistoimingul on kaks seadepunkti, peavad täiturmehhanismid tagama võimaluse muuta juhtimistoimingut maksimaalsest väärtusest.
Konstantse kiiruse regulaatoriga süsteemides määrab objektile suunatud juhtimistegevuse reguleeriva keha liikumise aeg, mille permutatsioonikiirus sõltub täiturmehhanismide tehnilistest andmetest.
Proportsionaalsetes juhtimissüsteemides on juhtimistegevus objektil proportsionaalne parameetri kõrvalekaldega seatud väärtusest ja proportsionaalsustegur sõltub täiturmehhanismi, piduriseadmete konstruktsioonist ja pärast väljalülitamist.
Paljudes valuprotsesside automaatjuhtimissüsteemides on täiturmehhanismid kaetud regulaatori asendi tagasisidega. Ajami staatiliste ja dünaamiliste omaduste täiustatud hindamine viiakse läbi, võttes arvesse nende täpsust ja kiirust.
Täiturmehhanismide projekteerimisel on vaja seada selle väljundseadme liikumiskiirus nimikoormusel ja väljundseadme liikumiskiirusele vastav juhtsignaal.
Valukodade automaatikasüsteemides kasutatakse laias valikus täiturmehhanisme. Disaini järgi jagunevad need elektromehaanilisteks, elektromagnetilisteks, hüdraulilisteks, pneumaatilisteks ja kombineeritud.
Elektromehaanilised ajamid
Elektromehaanilisi ajamid kasutatakse automaatikasüsteemide erinevate seiskamis- ja reguleerimistööorganite juhtimiseks. Komplektid võivad sisaldada elektrimootorit, käigukasti, piirlüliteid, pöördemomenti piiravat sidurit ja tagasiside andurit.

Elektromehaanilised ajamid hõlmavad seadmeid ämbrite pööramiseks automaatseks valamiseks, punkrite avamiseks ja sulgemiseks kaalumisdosaatorite jaoks segamis- ja segamissüsteemides, laadimissulatusseadmetes jne.

Nendes valamisprotsessides pakuvad elektromehaanilised ajamid:
-
elektriajami kaug- või automaatne käivitamine, kasutades käivitusnuppe "Sule" ja "Ava";
-
elektriajami peatamine mis tahes vahepealses asendis nuppude või piirlülitite kontaktide abil;
-
hädaseiskamine kriitilise ülekoormuse korral;
-
töökorpuse lõpp-asendite (lift, punkri põhi, valamiskulp jne) kaugvalgussignaal;
-
elektriline blokeerimine muude mehhanismide poolt.
Elektromagnetilised ajamid
Elektromagnetilised ajamid on kombinatsioon elektromagnetist ja mehaanilisest seadmest, mida see liigutab. Need annavad juhitavale elundile edasiliikumise.

Elektromagnetilisi ajamid kasutatakse ventiilide, väravate, ventiilide ja poolide juhtimiseks automaatikasüsteemides kuppeldüüside, kütte ja hapnikuvarustuse reguleerimiseks terase tootmisprotsessis, süsteemides, mis kasutavad elektrohüdraulilised või elektropneumaatilised seadmed, milles solenoid liigutab juhtklappi jne.
Solenoidventiilide ja ventiilide puuduseks on see, et peaaegu hetkelise ümberlülitamise korral võib tekkida veehaamer.
Hüdraulilised ajamid
Hüdraulilisi ajamid kasutatakse laialdaselt automaatsetes valuliinides ja -süsteemides, kuna need võimaldavad märkimisväärset lühiajalist 5–7-kordset ülekoormust, neil on väikeste mõõtmete korral suured väljundmomendid (jõud) ja need suudavad pakkuda nurkiirendusi üle 20 000 rad. / s .
Enim kasutatavad hüdrokolbajamid, kus töövedelikuna kasutatakse naftaõlisid, sünteetilisi vedelikke, piirituse-glütseriini segu jne.
Valusüsteemides on kõige sagedamini kasutatavad kolbajamid ühe- ja kahetoimelised.
Hüdrauliliste ajamite puudusteks on nende suur mass, märkimisväärne voolutarve juhtimiseks ja raskused õnnetuste kõrvaldamisel.
Mõnede peamiste puuduste parandamiseks on eriti oluline pidurdusmeetodi ja -seaduse valik ning valukojas kasutatavate hüdrosilindrite piduriseadmete projekteerimisparameetrite arvutamine.
Teatud hüdrosilindrite ja piduriseadmete valiku määrab nende tööviis. Madalatel kiirustel on lubatud kasutada ilma piduriseadmeteta liikuvaid hüdrosilindreid koos konstruktsioonide või seadmete liikuvate osade pidurdamisega vastu piirajat. Kui töökiirus tõuseb 80 mm / s-ni, on vaja kasutada piduriseadmeid.
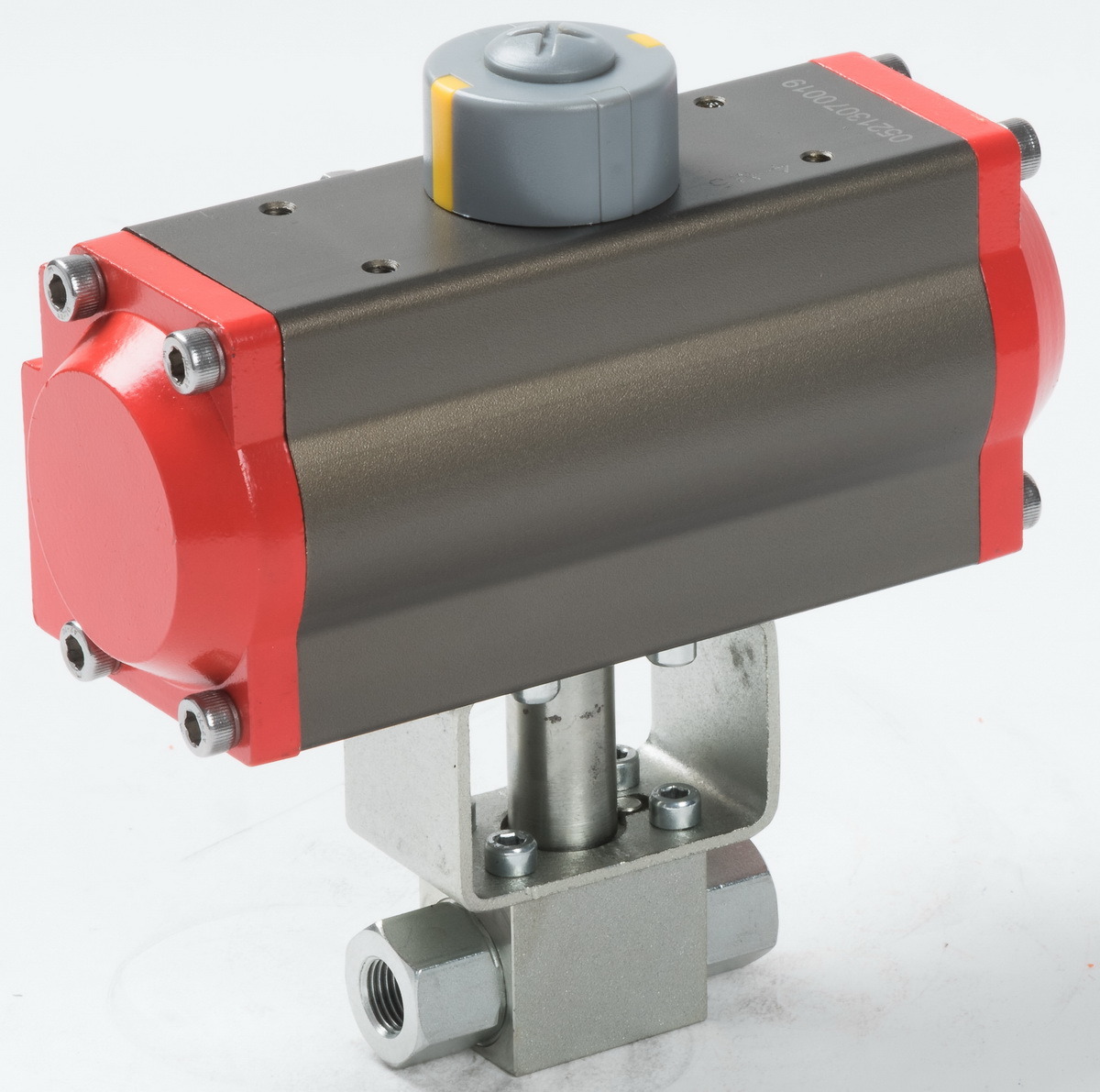
Pneumaatilised ajamid

Pneumaatilised ajamid ehitus samamoodi nagu hüdrauliline. Nende erinevused seisnevad töökeskkonna (gaas ja vedelik) omadustes.Gaasi kokkusurutavus avaldab negatiivset mõju süsteemi tööle, eriti oluliste koormuste ja kiirenduste korral.
Pneumaatilised ajamid jagunevad kolvideks ja membraanideks. Pneumaatilised kolbajamid on valukojas levinud oma lihtsuse ja madala hinna tõttu.
Samal ajal sunnib valuprotsesside agressiivne keskkond disainereid välja töötama spetsiaalseid pneumaatilisi silindreid automaatsete valumasinate jaoks. Sellised pneumaatilised silindrid on valmistatud suletud konstruktsiooniga, kus nende vardad ei puutu kokku keskkonnaga.
Nad kasutavad ühesuunalisi silindreid, mis on ühendatud ühe riiuliga väljundvõllil oleva käiguga. Võlli pöörlemine muudetakse vända abil lineaarseks liikumiseks ja kuigi topeltmuundamine toob kaasa võimsuse kaotuse, on need mehhanismid vastupidavad.
Kombineeritud ajamid

Festo uued seadmed võimaldavad lihtsate motoriseeritud liigutustega ülesandeid lahendada ja IO-Linki kaudu arukalt andmeid kontrollerilt PLC-le vahetada. See elektriajamite seeria ühendab pneumaatika lihtsuse elektriautomaatika eelistega.
Simplified Motion seeria elektriajamid on lihtsate ülesannete jaoks integreeritud motoriseerimise ja juhtimisega liikumislahendused. Need võimaldavad teil töötada ja kasutusele võtta ilma tarkvarata, "plug and play" põhimõttel.
Toite- ja tagasivoolukiiruse, käitamisjõu, lõppasendi seadistuse, summutamise ja käsitsi juhtimise parameetreid saab füüsiliste nuppude abil seadistada otse ajamil.
Valik
Valuautomaatikasüsteemide ajamite valimisel arvestage nende kiirust, tõhusust, vaikset tööd. Kõik need mõõdikud võivad ühel või teisel määral olla konkreetse automatiseerimisprobleemi lahendamisel olulised.
Siiski on üks põhikriteerium, mida tuleks iga täiturmehhanismi projekteerimisel või valikul eelistada – see on kõrge töökindlus.
Sellega seoses on soovitatav võimalusel laiemalt kasutada lihtsate kinemaatikaskeemidega elektromagnetilisi ja elektromehaanilisi ajameid.
Hüdrauliliste või pneumaatiliste ajamite kasutamisel tuleb tähelepanu pöörata tihendusseadmete töökindlusele ja liikuvate osade massi vähendamisele.