Mehhatrooniliste süsteemide pneumaatilised seadmed
Mobiilsetel masinatel, robotitel ja erinevatel mehhatroonilistel süsteemidel on tänu täiturmehhanismidele võimalus liigutada või muuta oma osade asendit. Selle või selle süsteemiosa liikumissuunda nimetatakse vabadusastmeks ja mida rohkem vabadusastmeid on täiturmehhanismil, seda suurem on masina, roboti või täiturmehhanismi liikuvus.
Sõltuvalt ajami tüübist saavutatakse masinaosade omavahelise interaktsiooni enam-vähem kvalitatiivne rakendamine, samuti selle töö efektiivsus ja paindlikkus. Täiturmehhanismi tüübi valimine on keeruline ülesanne, mille otsustavad süsteemi projekteerimisetapis robotinsenerid ja tehnoloogid.
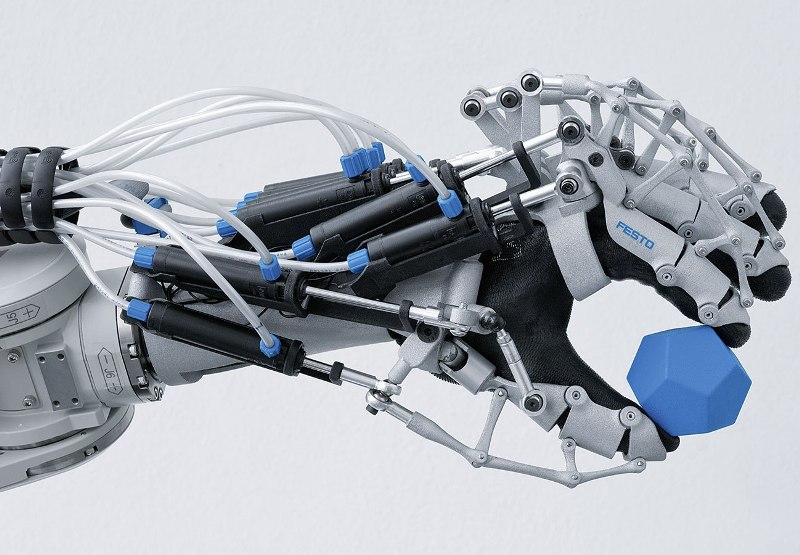
Üks populaarsemaid kasutatavaid draivitüüpe mehhatroonilistes süsteemides — pneumaatiline ajam… Siin kasutatakse töökeskkonnana gaasi, tavaliselt suruõhku, mille energia juhib mehhanismi. Seetõttu on pneumaatilised ajamid odavad, töökindlad, hõlpsasti seadistatavad ja kasutatavad ning tulekindlad.Töövedeliku (õhu) ostmisel ja utiliseerimisel ei ole kulusid.
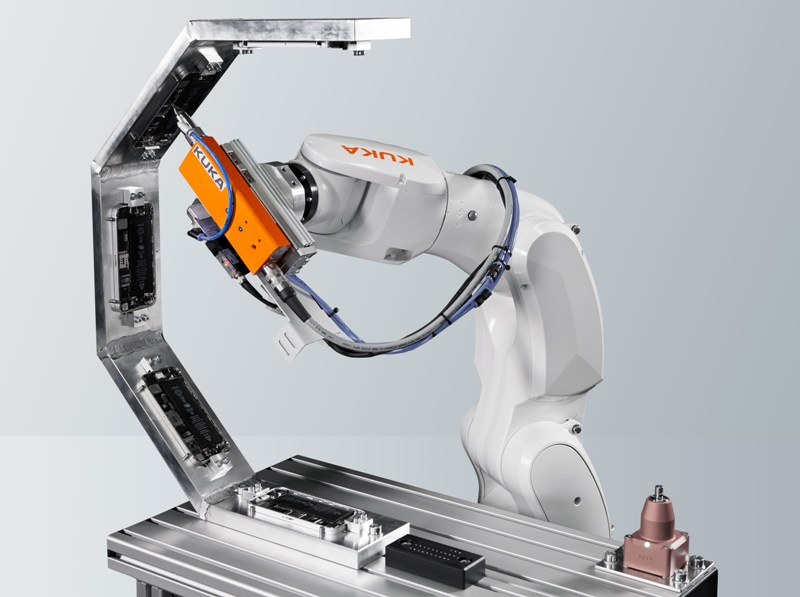
Siiski on mõned puudused, näiteks võimalik töörõhu vähenemine torude halvast tihedusest tingitud lekke tõttu, mis toob kaasa võimsuse ja kiiruse kaotuse, samuti komplikatsioone positsioneerimisel. Sellegipoolest kasutatakse tänapäeval robotites ja mobiilsetes masinates pneumaatilisi mootoreid, pneumaatilisi silindreid ja pneumaatilisi pneumaatilisi mootoreid.
Vaatame tüüpilist seadet pneumaatiline ajam… Pneumaatiline ajam sisaldab tingimata kompressorit ja õhumootorit. Selles kombinatsioonis saab süsteem teisendada ajami mehaanilisi omadusi vastavalt koormusnõuetele.
Translatsioonilise liikumise pneumaatilised ajamid on kaheasendilised, kui töökeha liigutamine toimub kahe lõppasendi vahel, kui ka mitmeasendilised, kui liikumine toimub erinevates asendites.
Vastavalt tööpõhimõttele võivad pneumaatilised ajamid olla ühetoimelised (kui vedru tagab tagasipöördumise lähteasendisse) või kahetoimelised (tagasi, nagu ka tööliikumist, tekitab suruõhk). Pneumaatilised lineaarsed ajamid jagunevad peamiselt kahte tüüpi: kolb ja membraan.
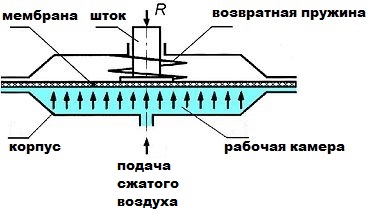
Pneumaatilises kolbajamis liigub kolb silindris suruõhu või vedru toimel (ühetoimelise täiturmehhanismi tagasikäigutakti tagab vedru).Pneumaatilises membraanajamis on membraaniga kaheks õõnsuseks jagatud kambri ühel küljel suruõhk, mis surub membraani, ja teisel küljel on diafragma külge kinnitatud varras, mis saab membraanilt pikisuunalise jõu. Seega kasutatakse pneumaatilist ajamit edukalt tsüklilistes juhtimissüsteemides, näiteks horisontaalse varre liikumisega manipulaatorites.
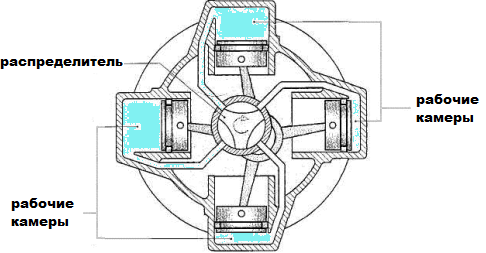
Funktsionaalselt saab pneumaatilise täiturmehhanismi jagada neljaks osaks: õhu ettevalmistamise seade, suruõhu jaotusseade, täiturmehhanismi mootor ja suruõhu ülekandesüsteem täiturmehhanismidele.
Kliimaseadmes õhk kuivatatakse ja puhastatakse tolmust. Programmi järgi avab või sulgeb jaotusplokk (ventiilide abil) suruõhu juurdevoolu ajamimootorite õõnsusse.
Klapid käitatakse tavaliselt elektromagnetitega või ka pneumaatiliselt (kui keskkond on plahvatusohtlik). Täitevmootoriplokk on tegelikult silindrid, mille kolbid pöörlevad või liiguvad sirgjooneliselt – pneumaatilised silindrid, mis erinevad antud nihke, jõudude ja kiiruste poolest.
Igal mootoril on oma töötsükkel ja tsüklite jada on rangelt määratud tehnoloogilise protsessiga ja seda kontrollib vastav programm roboti juhtimissüsteemid… Suruõhu erinevatele seadmetele edastamise süsteem kasutab erinevate sektsioonidega pneumaatilisi ajameid vastavalt käsilolevale ülesandele.
Põhimõtteliselt näeb energia ülekanne ja muundamine pneumaatilises ajamis välja selline.Peamootor juhib kompressorit, mis surub õhku kokku. Seejärel juhitakse suruõhk läbi juhtseadmete pneumaatilisele mootorile, kus selle energia muundatakse mehaaniliseks energiaks (kolvi, varda liikumine). Pärast seda juhitakse töögaas keskkonda, see tähendab, et see ei naase kompressorisse.
Pneumaatiliste ajamite eeliseid on vaevalt võimalik üle hinnata. Võrreldes vedelikega on õhk rohkem kokkusurutav, vähem tihe ja viskoosne, vedelam. Õhu viskoossus suureneb koos rõhu ja temperatuuriga.
Kuid kuna õhk sisaldab alati vähesel määral veeauru ja sellel puuduvad määrdeomadused, on oht kondensaadi kahjulikuks mõjuks kambrite tööpindadele. Seetõttu vajavad pneumaatilised ajamid konditsioneerimist, st neile antakse sellised omadused eelnevalt, et pikendada ajami kasutusiga, milles seda töökeskkonnana kasutatakse.