Fotoelektrilised asendiandurid - tööpõhimõte ja rakendus
Andurid – automaatjuhtimissüsteemides – on tundlikud elemendid või seadmed, mis tajuvad objekti vaadeldava parameetri väärtust ja annavad seadmele signaali võrrelda seda väärtust antud väärtusega, kuni genereeritakse erinevuse või lahknevuse signaal, mis muude seadmete kaudu, mõjutab hallatavat objekti.
Fotoelektriliste asendiandurite kasutusvaldkond hõlmab laia tööstuslikku spektrit. Seda tüüpi andurid aitavad lahendada tehnoloogiliste tootmisprotsesside juhtimisega seotud probleeme, kus on vaja tuvastada, positsioneerida või lihtsalt loendada teatud objekte.

Tänu oma mitmekülgsusele on fotoelektrilised andurid tänapäeval kõige laialdasemalt kasutatavad seal, kus on vaja tööstuslikku automatiseerimist. Neid eristab võime teostada mittekontaktseid mõõtmisi ja objektide loendamist ning kuvada asjakohast teavet digitaalse signaali kujul, mida on lihtne tajuda ja töödelda. iga kaasaegne kontroller.
Digitaalsed väljundid sisaldavad tavaliselt PNP- või NPN-transistore või lihtsalt releesid. Toide toimub konstantse (või võrgu) pingega 10 volti 240 volti piires.
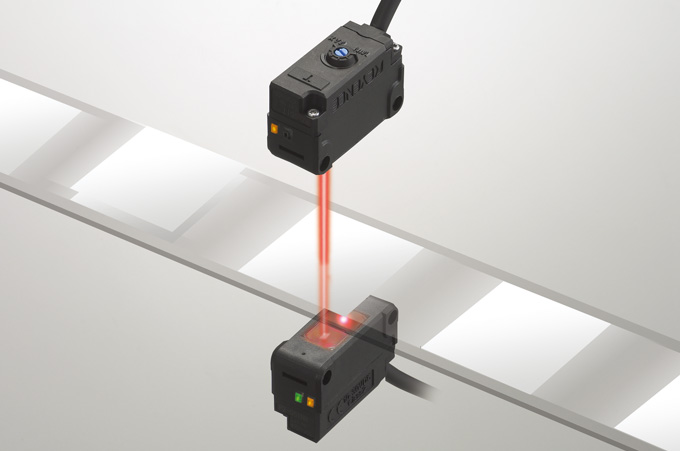
Kiire katkestuse põhimõte

Kaks korpust, saatja ja vastuvõtja, moodustavad ühe seadme. Need on paigaldatud selle koha vastaskülgedele, kust objekt eeldatavasti möödub. Vastuvõtja on staatiliselt fikseeritud emitteri külge, nii et emitteri peegeldumata kiir tabab alati vastuvõtja detektorit.
Tööpiirkond (fikseeritud objekti suurus) on praktiliselt piiramatu ning määratletud objektid võivad olla nii läbipaistvad kui ka läbipaistmatud.
Kui objekt on läbipaistmatu, siis kiir lihtsalt kattub ja objekt blokeerib selle. Kui objekt on läbipaistev, suunatakse kiir kõrvale või hajutatakse nii, et vastuvõtja ei näe seda enne, kui objekt avastamiskohast lahkub. See tagab kiire katkemise põhimõttel põhineva fotoelektrilise anduri kõrge töökindluse ja täpsuse. Need andurid võivad töötada emitteri ja vastuvõtja vahelisel kaugusel mõnest sentimeetrist kuni kümnete meetriteni.
Helkurilt valgusvihu peegelduse põhimõte
Andur koosneb kahest osast – emitterist ja reflektorist. Vastuvõtja ja saatja asuvad ühes korpuses, mis on fikseeritud paigal ühele poole uuritavat kohta ning teisele küljele on paigaldatud reflektor (reflektor). Erinevad reflektorid võimaldavad seda tüüpi andureid erinevatel kaugustel kasutada ning vastuvõtja tundlikkust saab mõnikord reguleerida.

Need andurid sobivad ka klaasi ja muude tugevalt peegeldavate pindade tuvastamiseks.Nagu kiire katkestusandurite puhul, võimaldavad reflektoripõhised andurid mõõta objektide üldmõõtmeid või lihtsalt neid lugeda.
Kuna siin on üks juhtum, nõuab seade üldjuhul vähem paigaldusruumi, mõnikord on see oluline eelis, eriti kompaktsust nõudvate automaatikasüsteemide puhul. Need andurid võivad töötada keha ja helkuri vahelisel kaugusel mõnest sentimeetrist kuni mõne meetrini.
Kiire objektilt peegeldumise põhimõte

Kogu seade on üks korpus, mis sisaldab emitterit ja vastuvõtjat, mis on võimelised reageerima isegi objektilt peegelduvale hajuvale kiirele. Seda tüüpi andurite mudelid on enamasti odavad, võtavad paigaldamisel kõige vähem ruumi ega vaja reflektorit.
Piisab anduri staatilisest fikseerimisest mitte kaugel uuritavast piirkonnast ja reguleerida selle tundlikkust vastavalt tuvastatud objekti pinna tüübile. Seda tüüpi andurid sobivad töötamiseks väikestel, suurusjärgus mõnekümne sentimeetri kaugusel objektidest, näiteks konveierilindil liikuvate toodetega.