Mis on mehhatroonika, mehhatroonilised elemendid, moodulid, masinad ja süsteemid
Sõna "mehhatroonika" on moodustatud kahest sõnast - "mehaanika" ja "elektroonika". Selle termini pakkus välja 1969. aastal Yaskawa Electricu vanemarendaja, jaapanlane nimega Tetsuro Mori. Yaskawa Electric spetsialiseerus 20. sajandil elektriajamite ja alalisvoolumootorite arendamisele ja täiustamisele ning saavutas seetõttu selles suunas suurt edu, näiteks töötati seal välja esimene ketasarmatuuriga alalisvoolumootor.
Sellele järgnesid arengud seoses esimeste riistvaraliste CNC-süsteemidega. Ja 1972. aastal registreeriti siin kaubamärk Mechatronics. Ettevõte tegi peagi suuri edusamme elektriajamite tehnoloogiate arendamisel. Hiljem otsustas ettevõte loobuda sõnast "Mehhatroonika" kaubamärgina, kuna seda terminit kasutati laialdaselt nii Jaapanis kui ka mujal maailmas.

Igal juhul on Jaapanis sellise lähenemise tehnoloogia kõige aktiivsem arendus, kui ülitäpse elektriajami juhtimise rakendamiseks tekkis vajadus kombineerida mehaanilisi elemente, elektrimasinaid, jõuelektroonikat, mikroprotsessoreid ja tarkvara.
Tavaline mehhatroonika graafiline sümbol on diagramm RPI (Rensselaer Polytechnic Institute, NY, USA) veebisaidilt:
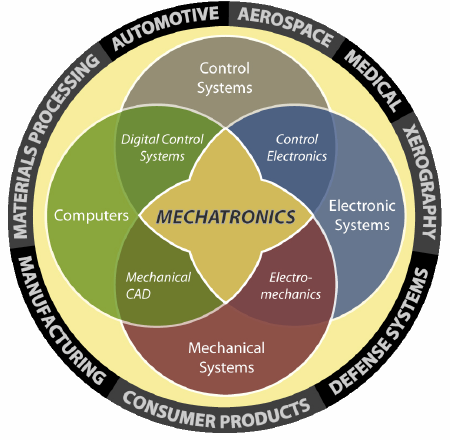
Mehhatroonika on üks uusimaid insenerivaldkondi maailmas, mis on UNESCO andmetel üks kümnest kõige lootustandvamast ja nõutuimast.
Üldiselt võib mõistele "mehhatroonika" anda järgmise definitsiooni – see on teaduse ja tehnoloogia valdkond, mis põhineb täppismehaanika, elektrotehnika, elektroonika, mikroprotsessortehnoloogia, erinevate toiteallikate, elektri-, hüdraulika- ja ühikute süstemaatilisel kombinatsioonil. pneumaatilised ajamid, aga ka nende intelligentne juhtimine, keskendusid kaasaegsete automatiseeritud tootmissüsteemide plokkide loomisele ja käitamisele.
Mehhatroonika on arvutipõhine liikumisjuhtimine.
Mehhatroonika eesmärk on luua kvalitatiivselt uusi liikumismooduleid, mehhatroonilisi liikumismooduleid, intelligentseid mehhatroonikamooduleid ning nende baasil liikuvaid intelligentseid masinaid ja süsteeme.
Ajalooliselt arenes mehhatroonika elektromehaanikast ja läks oma saavutustele toetudes kaugemale, kombineerides süstemaatiliselt elektromehaanilisi süsteeme arvutijuhtimisseadmete, sisseehitatud andurite ja liidestega.

Mehhatroonilise süsteemi skeem
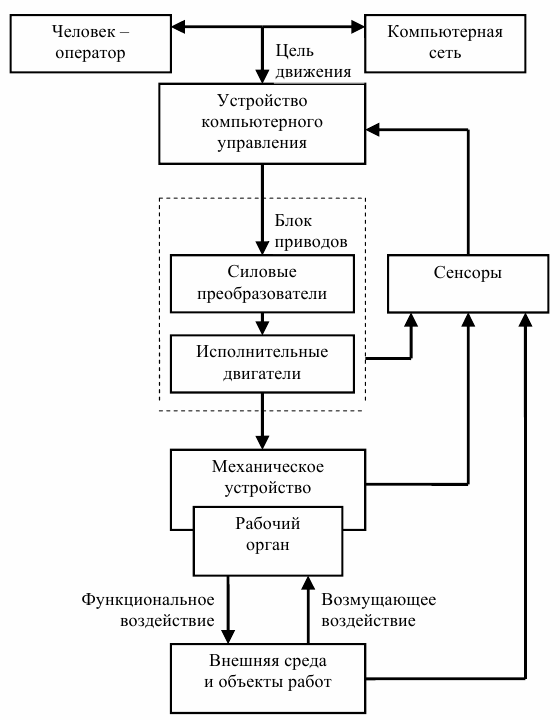
Mehhatrooniliste süsteemide üldistatud struktuur
Elektroonilised, digitaalsed, mehaanilised, elektrilised, hüdraulilised, pneumaatilised ja infoelemendid – võivad olla mehhatroonilise süsteemi osad, kuna algselt erineva füüsilise olemusega elemendid koondatakse, et saada süsteemist kvalitatiivselt uus tulemus, mida pole võimalik saavutada. iga elemendi kui eraldi esitaja poolt.

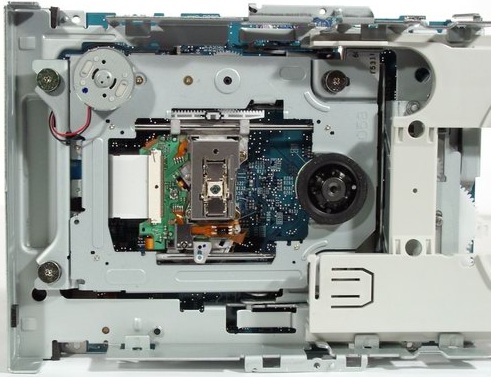
Eraldi spindliga mootor ei suuda DVD-mängija salve iseenesest välja võtta, kuid mikrokontrolleri tarkvaraga vooluringi juhtimisel ja korralikult tiguülekandega ühendatud toimib kõik lihtsalt ja näeb välja nagu lihtne monoliitne süsteem. Vaatamata välisele lihtsusele sisaldab mehhatrooniline süsteem definitsiooni järgi mitut mehhatroonilist üksust ja moodulit, mis on omavahel ühendatud ja koos toimivad, et sooritada konkreetseid funktsionaalseid toiminguid konkreetse ülesande lahendamiseks.
Mehhatroonikamoodul on iseseisev toode (struktuuriliselt ja funktsionaalselt), mis on loodud liikumiste sooritamiseks koos läbitungimisega ja samaaegselt sihipäraselt selle komponentide riist- ja tarkvaraintegratsiooniga.
Tüüpiline mehhatrooniline süsteem koosneb omavahel ühendatud elektromehaanilistest ja toitekomponentidest, mida omakorda juhib arvuti või mikrokontrollerid.
Sellise mehhatroonilise süsteemi projekteerimisel ja ehitamisel püütakse vältida tarbetuid sõlmpunkte ja liideseid, teha kõik kokkuvõtlikult ja võimalikult sujuvalt, mitte ainult selleks, et parandada seadme massiomadusi, vaid ka suurendada töökindlust. süsteemist üldiselt.
Vahel ei ole inseneridel lihtne, nad on sunnitud leidma väga ebatavalisi lahendusi just tänu sellele, et erinevad üksused on erinevates töötingimustes ja teevad täiesti erinevaid asju. Näiteks mõnes kohas ei tööta tavaline laager ja see asendatakse elektromagnetilise vedrustusega (seda tehakse eriti turbiinides, mis pumpavad gaasi läbi torude, kuna tavaline laager peaks gaasi tungimise tõttu kiiresti rikki). selle määrdeaine).
Ühel või teisel viisil on mehhatroonika tänapäeval imbunud kõike alates kodumasinatest kuni ehitusrobootika, relvade ja kosmosetehnikani. Kõik CNC-masinad, kõvakettad, elektrilukud, ABS-süsteem teie autos jne. — kõikjal pole mehhatroonika mitte ainult kasulik, vaid ka vajalik. Nüüd on haruldane, kust leiate käsitsijuhtimise, kõik taandub sellele, et vajutasite nuppu fikseerimata või puudutasite lihtsalt andurit - tulemuse saite - see on võib-olla kõige primitiivsem näide sellest, mida mehhatroonika tänapäeval endast kujutab.
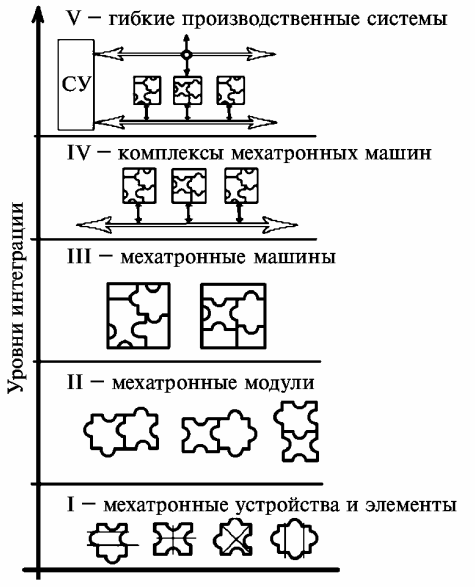
Mehhatroonika integratsioonitasemete hierarhiaskeem
Integratsiooni esimese tasandi moodustavad mehhatroonilised seadmed ja nende elemendid. Integratsiooni teise taseme moodustavad integreeritud mehhatroonilised moodulid. Integratsiooni kolmanda tasandi moodustavad integreerimismehhatroonilised masinad. Neljanda integratsioonitasandi moodustavad mehhatrooniliste masinate kompleksid. Viies integratsioonitasand moodustatakse mehhatrooniliste masinate ja robotite komplekside ühtsel integratsiooniplatvormil, mis eeldab ümberkonfigureeritavate paindlike tootmissüsteemide moodustamist.
Tänapäeval kasutatakse mehhatroonikamooduleid ja süsteeme laialdaselt järgmistes valdkondades:
-
masinaehitus ja automaatikaseadmed, tehnoloogilised protsessid masinaehituses;
-
tööstus- ja erirobootika;
-
lennundus- ja kosmosetehnoloogia;
-
sõjavarustus, politsei- ja eriteenistuste sõidukid;
-
elektroonikatehnika ja kiirprototüüpide valmistamise seadmed;
-
autotööstus (mootorrattaveo moodulid, mitteblokeeruvad pidurid, automaatkäigukastid, automaatsed parkimissüsteemid);
-
mittetraditsioonilised sõidukid (elektriautod, elektrijalgrattad, ratastoolid);
-
kontoritehnika (nt koopiamasinad ja faksiaparaadid);
-
arvutite välisseadmed (nt printerid, plotterid, CD-ROM-draivid);
-
meditsiini- ja spordivahendid (invaliidide bioelektrilised ja eksoskeleti proteesid, toniseerivad trenažöörid, kontrollitavad diagnostikakapslid, masseerijad jne);
-
kodumasinad (pesu-, õmblus-, nõudepesumasinad, iseseisvad tolmuimejad);
-
mikromasinad (meditsiini, biotehnoloogia, side ja telekommunikatsiooni jaoks);
-
juhtimis- ja mõõteseadmed ja masinad;
-
lifti- ja laoseadmed, automaatuksed hotellides ja lennujaamades; foto- ja videotehnika (videoplaadimängijad, videokaamera teravustamisseadmed);
-
simulaatorid keerukate tehniliste süsteemide operaatorite ja pilootide koolitamiseks;
-
raudteetransport (rongijuhtimis- ja stabiliseerimissüsteemid);
-
intelligentsed masinad toiduaine-, liha- ja piimatööstusele;
-
trükimasinad;
-
nutiseadmed showtööstusele, atraktsioonid.
Sellest tulenevalt kasvab vajadus mehhatrooniliste tehnoloogiatega personali järele.