Elektroonilise pingeregulaatori tööpõhimõte
 Pinge stabilisaatorid muutuvad ehitusfaasis üha populaarsemaks nii majaomanike kui ka projekteerijate seas. Tänapäeval kasutatakse stabilisaatorites kõige sagedamini autotransformaatorit. Autotransformaatori põhimõte on teada ja seda on pikka aega kasutatud pinge muundamiseks ja stabiliseerimiseks.
Pinge stabilisaatorid muutuvad ehitusfaasis üha populaarsemaks nii majaomanike kui ka projekteerijate seas. Tänapäeval kasutatakse stabilisaatorites kõige sagedamini autotransformaatorit. Autotransformaatori põhimõte on teada ja seda on pikka aega kasutatud pinge muundamiseks ja stabiliseerimiseks.
Autotransformaatori juhtimismeetod ise on aga palju muutunud. Kui enne toimus pingereguleerimine käsitsi või äärmisel juhul analoogplaadiga, siis tänapäeval juhib pingestabilisaatorit võimas protsessor.
Uuenduslikud tehnoloogiad pole mähiste ümberlülitamise viisist mööda läinud. Varem kasutati releelüliteid või mehaanilisi voolukollektoreid, tänapäeval mängivad oma rolli triacid. Mehaaniliste elementide asendamine triakkidega muutis stabilisaatori vaikseks, vastupidavaks ja hooldusvabaks.
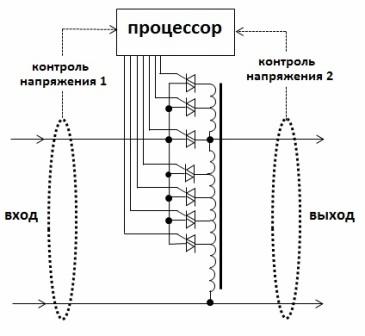
Kaasaegne pingestabilisaator töötab elektrooniliste lülitite põhimõttel, mis lülitavad autotransformaatori mähiseid spetsiaalse programmiga protsessori juhtimisel.
Protsessori põhifunktsiooniks on sisend- ja väljundpinge mõõtmine, olukorra analüüsimine ja vastava triaki sisselülitamine.
Need pole aga kaugeltki kõik protsessori funktsioonid. Lisaks pinge reguleerimisele täidab protsessor mitmeid stabilisaatori tööga seotud funktsioone.
Kõige tähtsam on triakide vabastamine.
Siinuslaine moonutuste kõrvaldamiseks tuleb triac sisse lülitada täpselt pinge siinuslaine nullpunktis. Selleks teeb protsessor mitukümmend pingemõõtmist ja saadab õigel hetkel triacile võimsa impulsi, provotseerides selle sisse lülituma (avamine).
Kuid enne seda on vaja kontrollida, kas eelmine triac on välja lülitatud, vastasel juhul tekib vastuvool (triacid on üsna raskesti juhitavad elemendid ja väljalülitamise juhtumeid võib esineda mitmel põhjusel, näiteks häirete korral).
Mikrovoolusid mõõtes analüüsib protsessor elektrooniliste lülitite olekut ja alles seejärel teostab toiminguid.
Peaksite mõistma, et protsessor teeb seda kõike vähem kui 1 mikrosekundiga, omades aega arvutuste tegemiseks, kui pinge siinuslaine on nullpunkti piirkonnas. Toiminguid korratakse igas poolfaasis.
Nii protsessori kui ka triac-lülitite suur kiirus võimaldas luua koheselt reageeriva pingeregulaatori. Tänapäeval tõuseb elektrooniliste stabilisaatorite protsess 10 millisekundit, see tähendab ühe pinge poolfaasi võrra. See võimaldab teil seadmeid usaldusväärselt kaitsta toitehäirete eest.
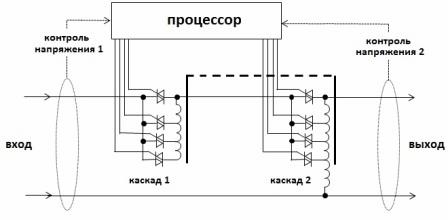
Lisaks võimaldas protsessori kiirus kaheastmelise juhtimissüsteemi abil luua täpsemaid stabilisaatoreid. Kaheastmelised regulaatorid töötlevad pinget kahes etapis. Näiteks võib esimesel etapil olla ainult 4 etappi. Pärast töötlemist lülitatakse sisse teine aste ja pinge viiakse ideaalsele tasemele.
Kaheastmelise juhtimisahela kasutamine võimaldab vähendada toodete maksumust.
Otsustage ise, kui triakisid on ainult 8 (esimesel etapil 4 ja teisel 4), saab reguleerimisastmeid juba 16 — kombineeritud meetodil (4×4 = 16).
Nüüd, kui on vaja toota ülitäpset stabilisaatorit, näiteks astmeid 36 või 64, on vaja palju vähem triakke - vastavalt 12 või 16:
36-astmelise puhul on esimene aste 6 triakki, teine aste on 6 triakki 6 × 6 = 36;
64 etapi jaoks on esimene etapp 8 triakki, teine etapp on 8 triakki 8 × 8 = 64.
Tähelepanuväärne on see, et mõlemad etapid kasutavad sama trafot. Tegelikult miks panna teist, kui kõik saab ühe peal tehtud.
Sellise stabilisaatori kiirust saab veidi vähendada (reaktsiooniaeg 20 millisekundit). Kuid kodumasinate puhul pole see numbrite järjekord siiski oluline. Parandus on peaaegu kohene.
Protsessorile on peale triakide lülitamise pandud lisaülesandeid: moodulite oleku jälgimine, protsesside jälgimine ja kuvamine, ahelate testimine.