Elektrimootorite ja tootmismehhanismide mehaanilised omadused
 Elektriajami projekteerimisel tuleb elektrimootor valida nii, et selle mehaanilised omadused vastaksid tootmismehhanismi mehaanilistele omadustele. Mehaanilised omadused annavad muutujate seose püsiseisundis.
Elektriajami projekteerimisel tuleb elektrimootor valida nii, et selle mehaanilised omadused vastaksid tootmismehhanismi mehaanilistele omadustele. Mehaanilised omadused annavad muutujate seose püsiseisundis.
Mehhanismi mehaanilist omadust nimetatakse seoseks nurkkiiruse ja mehhanismi takistusmomendi vahel, taandatuna mootori võllile) ω = f (Mc).
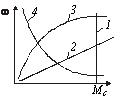
Riis. 1. Mehhanismide mehaanilised omadused
Kõigi sortide hulgas on mitut tüüpi mehhanismide mehaanilisi omadusi:
1. Iseloomulik kiirusest sõltumatu takistusmomendiga (sirge 1 joonisel 1). Kiirusest sõltumatu mehaaniline karakteristik joonistatakse pöörlemisteljega paralleelse sirgjoonena, antud juhul vertikaalselt. Sellist omadust omavad näiteks kraanad, vintsid, konstantse tarnekõrgusega kolbpumbad jne.
2.Karakteristik, mille takistusmoment on lineaarselt sõltuv kiirusest (rida 2 joonisel 1). See sõltuvus on omane näiteks püsival koormusel töötava sõltumatult ergastava alalisvoolugeneraatori ajamile.
3. Iseloomulik mittelineaarse pöördemomendi suurenemisega (kõver 3 joonisel 1). Tüüpilised näited on ventilaatorite, tsentrifugaalpumpade, propellerite töö. Nende mehhanismide puhul sõltub moment Mc nurkkiiruse ω ruudust... See on nn. paraboolne (ventilaator) mehaaniline omadus.
4. Iseloomulik mittelineaarselt väheneva takistusmomendiga (kõver 4 joonisel 1). Siin on takistusmoment pöördvõrdeline pöörlemiskiirusega. Sel juhul jääb võimsus konstantseks kogu mehhanismi töökiiruse vahemikus. Näiteks mõne metallilõikepingi põhiliikumise (treimine, freesimine, puurimine) mehhanismides muutub hetk Mc pöördvõrdeliselt ω-ga ja mehhanismi tarbitav võimsus jääb konstantseks.
Elektrimootori mehaanilisi omadusi nimetatakse selle nurkkiiruse sõltuvuseks pöördemomendist ωd = f (M). Siinkohal tuleb meeles pidada, et momendil M mootori võllil on olenemata pöörlemissuunast positiivne märk — liikumishetk. Samas on vastupanuhetk Mc negatiivse märgiga.
Näidetena on joonised fig. 2 näitab mehaanilisi omadusi: 1 — sünkroonmootor; 2 — sõltumatu ergutusega alalisvoolumootor; 3 — jadaergutusega alalisvoolumootor.
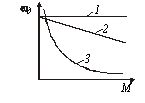 Riis. 2. Elektrimootorite mehaanilised omadused
Riis. 2. Elektrimootorite mehaanilised omadused
Elektriajami mehaaniliste omaduste omaduste hindamiseks kasutatakse iseloomuliku jäikuse mõistet.Mehaanilise karakteristiku jäikus määratakse väljendiga
β = dM/dω
kus dM — mootori pöördemomendi muutus; dωd — vastav nurkkiiruse muutus.
Lineaarsete karakteristikute puhul jääb väärtus β konstantseks, mittelineaarsete puhul sõltub see tööpunktist.
Seda kontseptsiooni kasutades on joonisel fig. 2, saab kvalitatiivselt hinnata järgmiselt: 1 — absoluutselt jäik (β = ∞); 2 — tahke; 3 - pehme.
Täiesti keeruline omadus – mootori pöörlemiskiirus jääb muutumatuks, kui mootori koormus muutub nullist nominaalseks. Sünkroonmootoritel on see omadus.
Jäik karakteristik — pöörlemiskiirus muutub vähe, kui koormus muutub nullist nominaalseks. See karakteristik on nii paralleelselt ergastatud alalisvoolumootoril kui ka asünkroonmootoril karakteristiku lineaarse osa piirkonnas.
Jäigaks karakteristikuks loetakse seda, mille puhul kiiruse muutus ei ületa ligikaudu 10% nimipöörlemissagedusest, kui koormus muudetakse nullist nimiväärtusele.
Pehme karakteristik — mootori kiirus muutub oluliselt suhteliselt väikeste koormuse muutustega. Seda karakteristikut omab jada-, sega- või paralleelergutus, kuid täiendava takistusega armatuuriahelas, aga ka rootori ahela takistusega asünkroonne alalisvoolumootor.
Enamiku tootmismehhanismide jaoks kasutatakse asünkroonseid oravpuuriga mootoreid, millel on jäigad mehaanilised omadused.
Kõik elektrimootorite mehaanilised omadused jagunevad looduslikeks ja tehislikeks.
Loomulikud mehaanilised omadused viitavad mootori töötingimustele koos parameetrite nimiväärtustega.
Näiteks paralleelse ergastusega mootori puhul saab joonistada loomuliku karakteristiku juhuks, kui armatuuri pingel ja ergutusvoolul on nimiväärtused ja armatuuriahelas pole lisatakistust.
Asünkroonmootori loomulik karakteristik vastab mootori staatorisse antava vahelduvvoolu nimipingele ja nimisagedusele eeldusel, et rootori vooluringis ei ole lisatakistust.
Seega saab iga mootori jaoks ehitada ainult ühe loodusliku karakteristiku ja piiramatu arvu tehislikke omadusi. Näiteks alalisvoolumootori või asünkroonmootori rootori ahela iga uue armatuuri takistuse väärtusel on oma mehaanilised omadused.
