Ühefaasiliste asünkroonmootorite omadused
Ühefaasilisi asünkroonmootoreid kasutatakse laialdaselt tehnoloogias ja igapäevaelus. Ühefaasiliste asünkroonsete elektrimootorite tootmine vatist kuni sadade vatideni moodustab üle poole kõigi väikese võimsusega masinate toodangust ja nende võimsus kasvab pidevalt.
Ühefaasilised mootorid jagunevad üldiselt kahte kategooriasse:
-
üldotstarbelised mootorid «, mis hõlmavad tööstuslikke ja koduseid elektrimootoreid;
-
automaatsete seadmete mootorid — juhitavad ja mittejuhitavad vahelduvvoolumootorid ning spetsiaalsed väikese võimsusega elektrimasinad (tahhogeneraatorid, pöördtrafod, selsiinid jne).
Märkimisväärne osa asünkroonsetest elektrimootoritest on üldotstarbelised mootorid, mis on ette nähtud töötama ühefaasilises vahelduvvooluvõrgus. Siiski on üsna ulatuslik universaalsete asünkroonsete elektrimootorite rühm, mis on loodud töötama nii ühe- kui ka kolmefaasilistes võrkudes.
Universaalsete mootorite disain praktiliselt ei erine kolmefaasiliste asünkroonsete masinate traditsiooniline disain… Kolmefaasilises võrgus töötades on nende mootorite omadused sarnased kolmefaasiliste mootoritega.
Ühefaasilistel mootoritel on oravpuuriga rootor ja staatorimähist saab valmistada erinevates versioonides. Kõige sagedamini asetatakse staatorile töötav mähis, mis täidab kaks kolmandikku piludest, ja käivitusmähis, mis täidab ülejäänud kolmandiku piludest. Käivitusspiraal arvestatakse pidevaks tööks ja käivitusmähis ainult käivitusperioodiks. Seetõttu on see valmistatud väikese ristlõikega traadist ja sisaldab märkimisväärsel hulgal pöördeid. Käivitusmomendi loomiseks sisaldab käivitusmähis faasi nihutavaid elemente - takisteid või kondensaatoreid.
Madala võimsusega asünkroonsed mootorid võivad olla kahefaasilised, kui staatorile asetatud töömähisel on kaks faasi, mis on ruumis segatud 90 ° võrra. Ühes faasis on pidevalt kaasas faasinihke element - kondensaator või takisti Top, mis tagab mähise voolude vahel teatud faasinihke.
Tavaliselt nimetatakse seda mootoriks, mille kondensaator on püsivalt ühendatud ühe faasiga kondensaator… Faasinihke kondensaatori mahtuvus võib olla konstantne, kuid mõnel juhul võib mahtuvuse väärtus käivitus- ja töörežiimis olla erinev.
Ühefaasiliste asünkroonmootorite iseloomulik tunnus on võime pöörata rootorit erinevates suundades. Pöörlemissuund määratakse esialgse pöördemomendi suuna järgi.
Seetõttu ei saa ühefaasiline mootor rootori madala takistuse korral (Ccr < 1) töötada vastupidises režiimis. Mootori režiim vastab rootori pööretele 0 <n <nc suuremal kiirusel toimub generaatori režiim.
Ühefaasiliste mootorite omadus on see, et selle maksimaalne pöördemoment sõltub rootori takistusest. Kui rootori aktiivtakistus suureneb, siis maksimaalne pöördemoment väheneb ja suurte takistusväärtuste Skr > 1 korral muutub see negatiivseks.
Seadme või mehhanismi käitamiseks elektrimootori tüübi valikul on vaja teada selle omadusi.Peamised neist on pöördemomendi karakteristikud (algkäivitusmoment, maksimaalne pöördemoment, minimaalne pöördemoment), pöörlemissagedus, vibroakustilised omadused. Mõnel juhul on vaja ka energia- ja kaalunäitajaid.
Näiteks arvutatakse ühefaasilise mootori omadused järgmiste parameetritega:
-
faaside arv — 1;
-
võrgu sagedus — 50 Hz;
-
võrgupinge — 220 V;
-
staatori mähise aktiivne takistus - 5 oomi;
-
staatori mähise induktiivne takistus — 9,42 oomi;
-
rootori mähise induktiivne takistus - 5,6 oomi;
-
masina aksiaalne pikkus — 0,1 m;
-
pöörete arv staatori mähises -320;
-
staatori augu raadius — 0,0382 m;
-
kanalite arv — 48;
-
õhuvahe — 1,0 x 103 m.
-
rootori induktiivsustegur 1,036.
Ühefaasiline mähis täidab kaks kolmandikku staatori piludest.
Joonisel fig. 1 on näidatud ühefaasilise elektrimootori voolu ja elektromagnetilise libisemismomendi sõltuvused. Ideaalses tühikäigurežiimis on mootori voolul, mida võrk tarbib peamiselt magnetvälja tekitamiseks, suhteliselt suur väärtus.
Simuleeritud mootori puhul on magnetiseerimisvoolu suurus umbes 30% algvoolust, sama võimsusega kolmefaasiliste mootorite puhul - 10-15%.Elektromagnetilisel momendil ideaalses tühikäigurežiimis on negatiivne väärtus, mis suureneb rootori ahela takistuse suurenedes. Kell libisemine C= 1, elektromagnetmoment on null, mis kinnitab mudeli õiget töötamist.
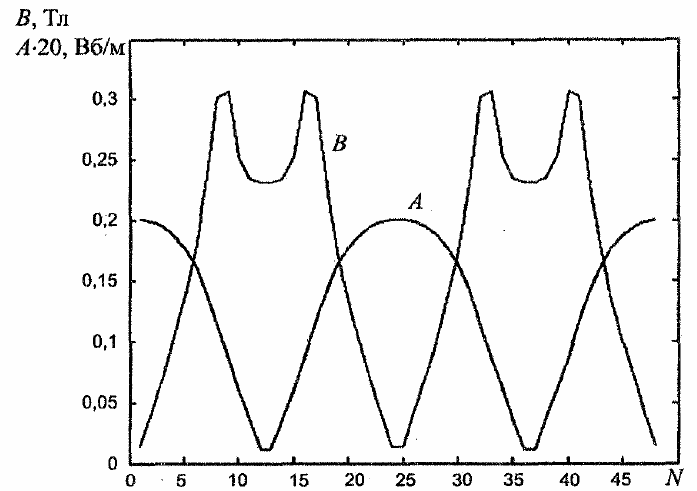
Joonis fig. 1. Vektorpotentsiaali ja magnetilise induktsiooni mähisjooned mootori vahes libisemise ajal s = 1
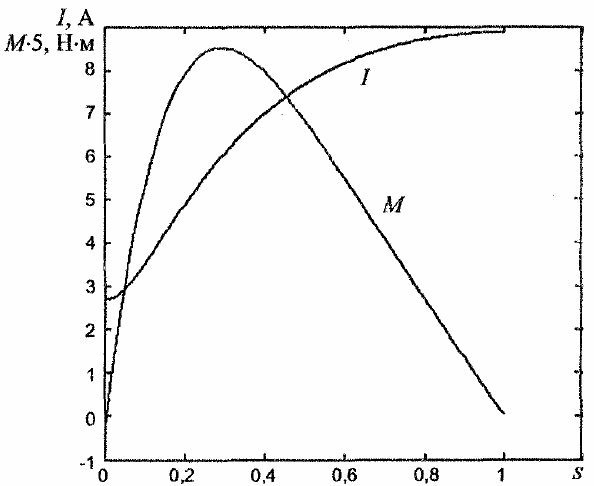
Riis. 2. Ühefaasilise asünkroonmootori voolu ja elektromagnetilise pöördemomendi sõltuvus libisemisest
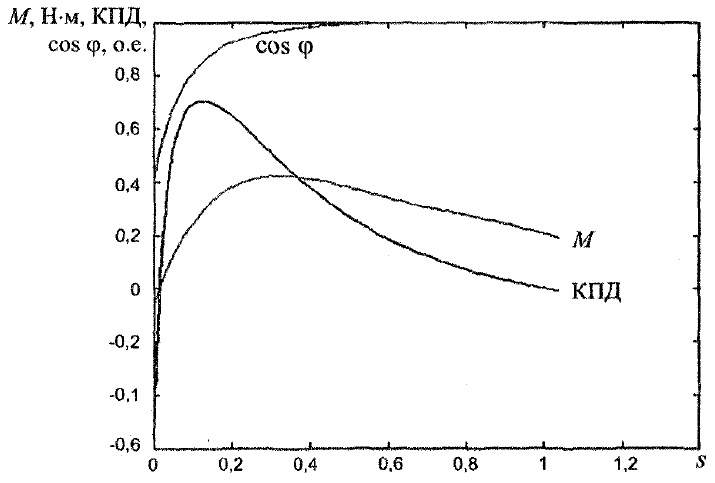
Kasuliku ja tarbitud võimsuse sõltuvused libisemisest (joonis 3) on traditsioonilise iseloomuga. Mootori efektiivsus ideaalses tühikäigurežiimis on negatiivsele pöördemomendile vastava negatiivse märgiga ja võimsustegur selles režiimis on väga madal (simuleeritud mootoril 0,125).
Võimsusteguri väiksem väärtus võrreldes kolmefaasiliste mootoritega on seletatav magnetiseerimisvoolu suure ulatusega. Koormuse kasvades suureneb võimsusteguri väärtus ja see muutub võrreldavaks kolmefaasiliste mootorite omaga (joonis 4).
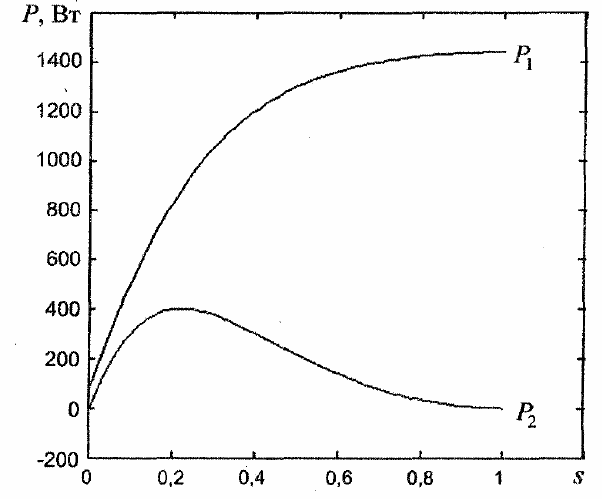
Riis. 3. Ühefaasilise asünkroonmootori kasuliku ja tarbitud võimsuse sõltuvus libisemisest
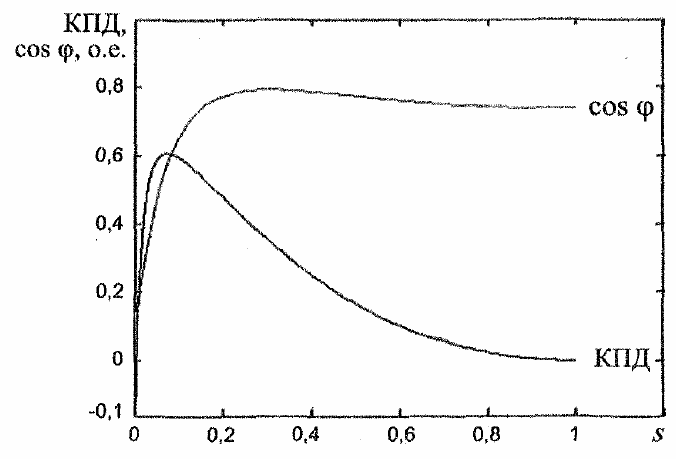
Riis. 4. Ühefaasilise asünkroonmootori kasuliku toime koefitsiendi ja võimsuse sõltuvus libisemisest
Kui rootori aktiivtakistus suureneb, siis elektromagnetilise momendi suurus väheneb ja kriitilistel libisemistel üle ühtsuse muutub see negatiivseks.
Joonisel fig. 5 näitab ühefaasilise libisemismootori elektromagnetilise momendi sõltuvust mootori sekundaarse keskkonna elektrijuhtivuse erinevate väärtuste korral.
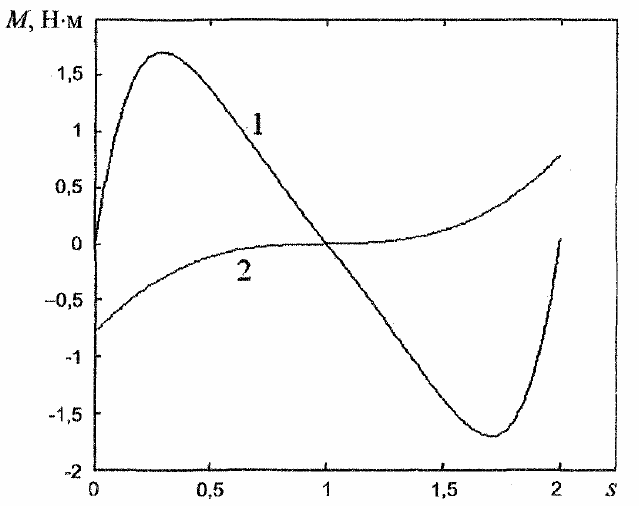
Riis. 5.Ühefaasilise libisemismootori elektromagnetilise momendi sõltuvus erinevatel rootoritakistustel (1–17 x 106 cm / m, 2–1,7 x 106 cm / m)
Kondensaatormootoritel on kaks mähist, mis on püsivalt võrguga ühendatud. Üks neist on ühendatud otse võrku, teine on ühendatud jadamisi kondensaatoriga, mis tagab vajaliku faasinihke.
Mõlemad mähised hõivavad staatoril sama arvu pilusid ning nende pöörete arv ja kondensaatori mahtuvus arvutatakse nii, et mõne libisemisega tekib ringikujuline pöörlev magnetväli. Kõige sagedamini aktsepteeritakse nominaalset libisemist sellisena. Sel juhul osutub esialgne pöördemoment aga nominaalsest palju väiksemaks.
Algrežiimis on magnetväli elliptiline; magnetvälja vastassuunas liikuvate komponentide mõju on tugevasti mõjutatud Kui kondensaatori mahtuvust suurendada, valides selle käivitamisel ringvälja saamise tingimusest, siis toimub pöördemomendi vähenemine ja a. energianäitajate vähenemine nominaallibisemisel.
Võimalik on ka kolmas variant, kui ümmargune väli vastab libisemisele, mille suurus on suurem kui nominaalrežiimis. Kuid see tee pole ka optimaalne, kuna pöördemomendi suurenemisega kaasneb märkimisväärne kadude suurenemine. Kondensaatormootori käivitusmomendi suurendamine on saavutatav rootori aktiivse takistuse suurendamisega. See meetod toob kaasa kadude suurenemise iga libisemisega, mille tagajärjel väheneb mootori efektiivsus.
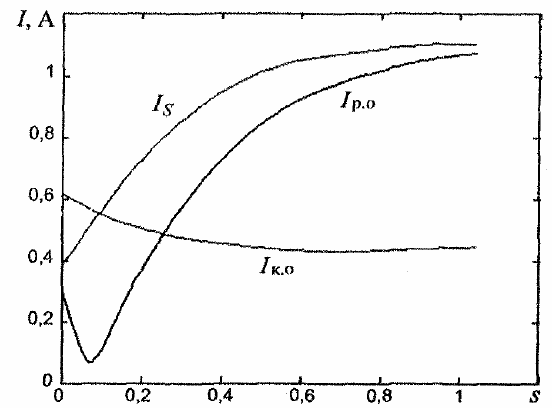
Riis. 6.Sõltuvus libisemiskondensaatori mootori vooludest (Azp.o — töömähise vool, Azk.o — kondensaatori pooli vool, E — mootori vool)
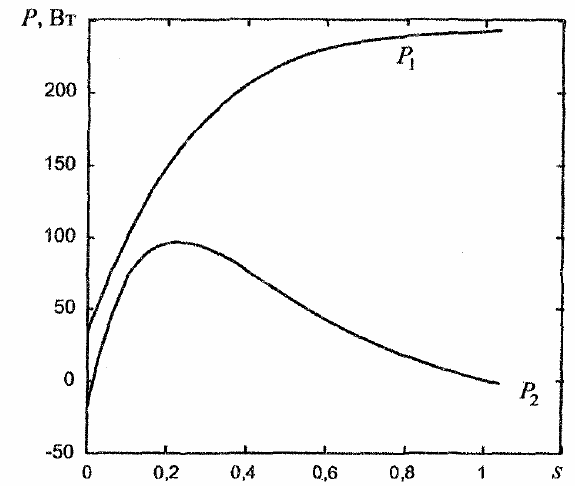
Riis. 7. Sõltuvus kondensaatori tarbitavast P1 ja kasulikust P2 libisemisvõimsusest
Riis. 8. Kasuliku toime ja võimsuse koefitsiendi ning libisemiskondensaatori mootori elektromagnetmomendi sõltuvus
Kondensaatormootoril on küllaltki rahuldav energiatõhusus, kõrge võimsustegur, mille väärtus ületab kolmefaasilise mootori võimsusteguri ning rootori suurenenud takistuse ja märkimisväärse võimsusega, kõrge käivitusmoment. Samal ajal, nagu eespool mainitud, on mootoril vähendatud efektiivsuse väärtus.
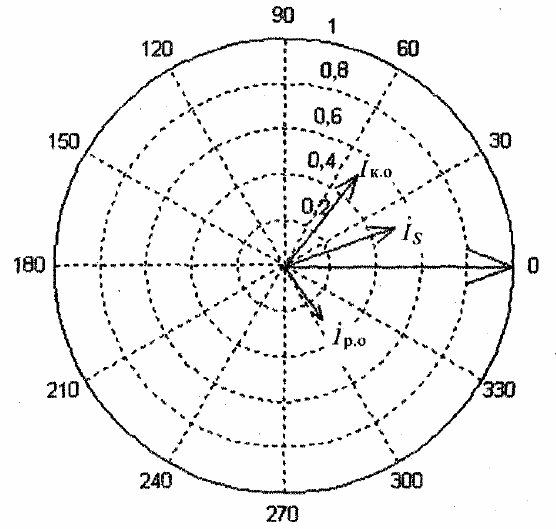
Riis. 9. Kondensaatormootori vektorskeem libisemisel s = 0,1
Vektordiagramm (joonis 9) näitab, et kondensaatori mahtuvuse valitud väärtusel juhib kondensaatori pooli vool võrgupinge suhtes ja tööpooli vool jääb maha. Diagrammil on ka näha, et nominaalsele lähedale libisedes on mootori magnetväli elliptiline. Ringvälja saamiseks tuleb kondensaatori mahtuvuse väärtust vähendada nii, et voolud kahes poolis oleksid võrdse suurusega.
Vaata ka sellel teemal:Mitmekiiruselised ühefaasilised kondensaatormootorid