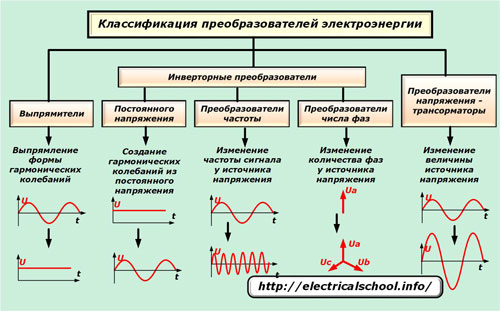
Elektrienergia muundamise tüübid
 Toiteallikaks on tohutul hulgal kodumasinaid ja tööstusrajatisi nende töös elektrienergia erinevat tüüpi. Seda loob paljusus EMF ja vooluallikad.
Toiteallikaks on tohutul hulgal kodumasinaid ja tööstusrajatisi nende töös elektrienergia erinevat tüüpi. Seda loob paljusus EMF ja vooluallikad.
Generaatorikomplektid toodavad ühe- või kolmefaasilist voolu tööstuslikul sagedusel, samas kui keemilised allikad toodavad alalisvoolu. Samas tuleb praktikas sageli ette olukordi, kus teatud seadmete tööks ei piisa ühest elektriliigist ja on vaja läbi viia selle muundamine.
Sel eesmärgil toodab tööstus suurel hulgal elektriseadmeid, mis töötavad erinevate elektrienergia parameetritega, teisendades need ühest tüübist teise erineva pinge, sageduse, faaside arvu ja lainekujudega. Vastavalt nende funktsioonidele jagatakse need konversiooniseadmeteks:
-
lihtne;
-
väljundsignaali reguleerimise võimalusega;
-
mis on varustatud stabiliseerimisvõimega.
Klassifitseerimismeetodid
Tehtavate toimingute olemuse järgi jagunevad muundurid seadmeteks:
-
püsti seisma
-
ühe või mitme etapi ümberpööramine;
-
signaali sageduse muutused;
-
elektrisüsteemi faaside arvu teisendamine;
-
pinge tüübi muutmine.
Tekkivate algoritmide juhtimismeetodite kohaselt töötavad reguleeritavad muundurid:
-
alalisvooluahelates kasutatav impulsi põhimõte;
-
Harmooniliste ostsillaatorite ahelates kasutatav faasimeetod.
Kõige lihtsamad muunduri konstruktsioonid ei pruugi olla varustatud juhtimisfunktsiooniga.
Kõik konversiooniseadmed võivad kasutada ühte järgmistest vooluahelatüüpidest:
-
kõnnitee;
-
null;
-
trafoga või ilma;
-
ühe, kahe, kolme või enama faasiga.
Parandusseadmed
See on kõige levinum ja vanem muundurite klass, mis võimaldab teil saada alaldatud või stabiliseeritud alalisvoolu vahelduvalt siinusekujuliselt, tavaliselt tööstuslikult.
Haruldased eksponaadid
Madala võimsusega seadmed
Veel mõnikümmend aastat tagasi kasutati seleenikonstruktsioone ja vaakumseadmeid raadiotehnikas ja elektroonikaseadmetes.

Sellised seadmed põhinevad seleeniplaadi ühest elemendist lähtuva voolu korrigeerimise põhimõttel. Need monteeriti adapterite abil järjestikku üheks struktuuriks. Mida suurem on korrigeerimiseks vajalik pinge, seda rohkem selliseid elemente kasutatakse. Need ei olnud kuigi võimsad ja talusid mitmekümne milliamprist koormust.
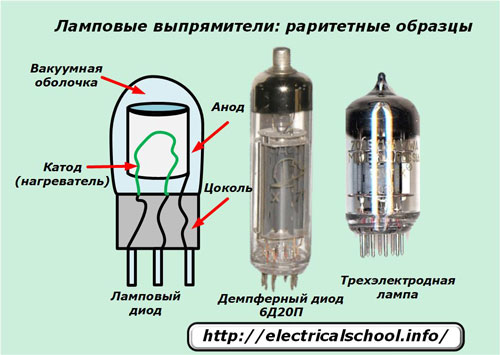
Lambialaldi suletud klaaskorpuses tekkis vaakum. Selles on elektroodid: anood ja hõõgniidiga katood, mis tagavad termokiirguse voolu.
Sellised lambid andsid raadiovastuvõtjate ja televiisorite erinevatele ahelatele alalisvoolu kuni eelmise sajandi lõpuni.
Ignitronid on võimsad seadmed
Tööstusseadmetes on varem laialdaselt kasutatud anood-katoodiga elavhõbeda ioonseadmeid, mis töötavad kontrollitud kaarlaengu põhimõttel. Neid kasutati seal, kus oli vaja kasutada sadade amprite tugevusega alaliskoormust kuni viis kilovolti (kaasa arvatud) alaldatud pingel.
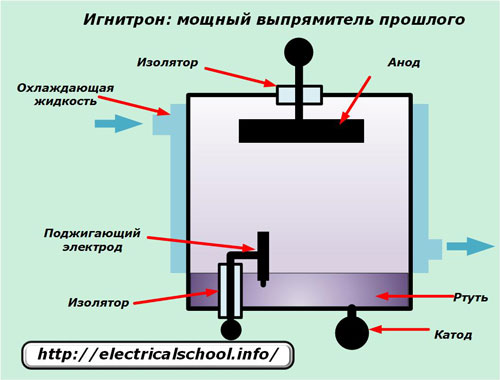
Elektronide voolu kasutati voolu liikumiseks katoodilt anoodile. See tekib kaarlahendusega, mis on põhjustatud ühes või mitmes katoodi piirkonnas, mida nimetatakse helendavateks katoodilaikudeks. Need tekivad abikaare sisselülitamisel süüteelektroodiga, kuni põhikaar süttib.
Selleks loodi lühiajalised mõne millisekundilised impulsid voolutugevusega kuni kümneid ampreid. Impulsside kuju ja tugevuse muutmine võimaldas juhtida süüturi tööd.
See konstruktsioon tagab alaldamise ajal hea pingetoe ja üsna kõrge efektiivsuse. Kuid disaini tehniline keerukus ja tööraskused viisid selle kasutamise tagasilükkamiseni.
Pooljuhtseadmed
Dioodid
Nende töö põhineb pooljuhtmaterjalide või metalli ja pooljuhi vaheliste kontaktide kaudu tekkiva p-n-siirde omaduste tõttu voolujuhtimise põhimõttel ühes suunas.
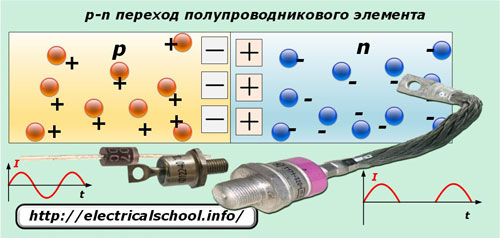
Dioodid läbivad voolu ainult kindlas suunas ja kui vahelduv siinusharmooniline läbib neid, siis katkestavad nad ühe poollaine ja seetõttu kasutatakse neid laialdaselt alaldina.
Kaasaegseid dioode toodetakse väga laias valikus ja neil on erinevad tehnilised omadused.
Türistorid
Türistor kasutab nelja juhtivat kihti, mis moodustavad keerukama pooljuhtstruktuuri kui diood, millel on kolm järjestikku ühendatud p-n-siirdekohta J1, J2, J3. Kontakte väliskihiga «p» ja «n» kasutatakse anoodina ja katoodina ning sisemise kihiga UE juhtelektroodina, mida kasutatakse türistori sisselülitamiseks ja reguleerimiseks.
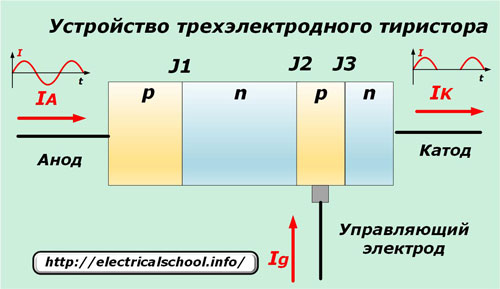
Sinusoidse harmoonilise alaldamine toimub samal põhimõttel nagu pooljuhtdioodi puhul. Kuid selleks, et türistor töötaks, on vaja arvestada teatud omadusega - selle sisemiste üleminekute struktuur peab olema elektrilaengute läbimiseks avatud, mitte suletud.
Seda tehakse teatud polaarsusega voolu juhtimisega läbi juhtelektroodi. Alloleval fotol on näidatud türistori avamise viisid, mida kasutatakse samaaegselt erinevatel aegadel läbitud voolutugevuse reguleerimiseks.
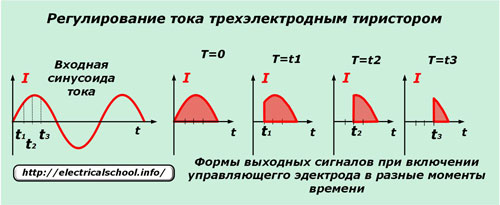
Kui siinussignaali nullväärtusest läbimise hetkel rakendatakse voolu läbi RE, tekib maksimumväärtus, mis punktides «1», «2», «3» järk-järgult väheneb.
Sel viisil reguleeritakse voolu koos türistori reguleerimisega. Triacid ja toite-MOSFET-id ja/või AGBT-d toiteahelates töötavad sarnaselt. Kuid nad ei täida voolu korrigeerimise funktsiooni, edastades seda mõlemas suunas. Seetõttu kasutavad nende juhtimisskeemid täiendavat impulsi katkestamise algoritmi.
DC / DC muundurid
Need konstruktsioonid teevad alalditele vastupidist. Neid kasutatakse siinuse vahelduvvoolu genereerimiseks keemilistest vooluallikatest saadud alalisvoolust.
Haruldane areng
Alates 19. sajandi lõpust on alalispinge vahelduvpingeks muundamiseks kasutatud elektrimasinate struktuure. Need koosnevad alalisvoolu elektrimootorist, mida toidab aku või akuplokk, ja vahelduvvoolugeneraatorist, mille armatuuri pöörleb mootoriajam.
Mõnes seadmes oli generaatori mähis keritud otse mootori ühisele rootorile. See meetod mitte ainult ei muuda signaali kuju, vaid suurendab reeglina ka pinge amplituudi või sagedust.
Kui generaatori armatuurile kerida kolm 120 kraadise nurga all asuvat mähist, siis selle abil saadakse samaväärne sümmeetriline kolmefaasiline pinge.

Umformereid kasutati laialdaselt kuni 1970. aastateni raadiolampide, trollibusside, trammide, elektrivedurite seadmete jaoks enne pooljuhtelementide massilist kasutuselevõttu.
Inverteri muundurid
Tööpõhimõte
Kaalutluse aluseks võtame KU202 türistori testahela akust ja lambipirnist.
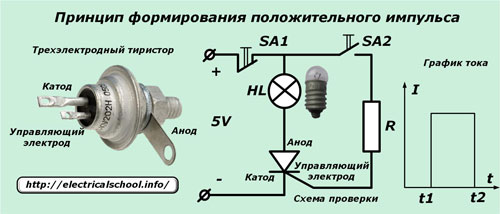
Aku positiivse potentsiaali andmiseks anoodile on ahelasse sisse ehitatud nupu SA1 tavaliselt suletud kontakt ja väikese võimsusega hõõglamp. Juhtelektrood on ühendatud läbi voolupiiraja ja SA2 nupu avatud kontakti. Katood on kindlalt ühendatud aku miinusküljega.
Kui vajutate hetkel t1 nuppu SA2, siis liigub vool läbi juhtelektroodi ahela katoodile, mis avab türistori ja süttib anoodiharus sisalduv lamp. Selle türistori disainiomaduste tõttu põleb see edasi ka siis, kui kontakt SA2 on avatud.
Nüüd ajahetkel t2 vajutame nuppu SA1.Anoodi toiteahel lülitub välja ja tuli kustub, kuna voolu vool läbi selle peatub.
Esitatud pildi graafik näitab, et alalisvool läbis ajaintervalli t1 ÷ t2. Kui vahetate nuppe väga kiiresti, saate moodustada ristkülikukujuline impulss positiivse märgiga. Samamoodi saate luua negatiivse impulsi. Selleks piisab vooluringi veidi muutmisest, et vool saaks liikuda vastupidises suunas.
Kahe positiivse ja negatiivse väärtusega impulsi jada loob lainekuju, mida elektrotehnikas nimetatakse ruutlaineks. Selle ristkülikukujuline kuju meenutab ligikaudu siinuslainet, millel on kaks vastasmärgiga poollainet.
Kui vaadeldavas skeemis asendame nupud SA1 ja SA2 releekontaktide või transistorlülititega ja lülitame need teatud algoritmi järgi, siis on võimalik automaatselt tekitada meander-kujuline vool ja reguleerida see teatud sagedusele, võimsusele. tsükkel, periood. Sellist lülitust juhib spetsiaalne elektrooniline juhtimisahel.
Toiteallika sektsiooni plokkskeem
Vaatleme näiteks sillamuunduri lihtsaimat primaarsüsteemi.
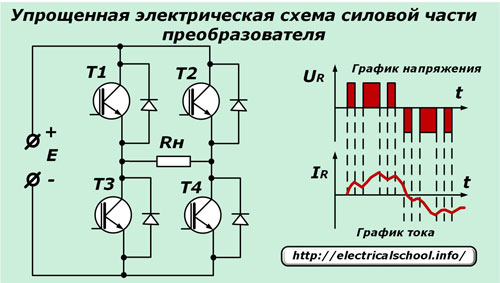
Siin tegelevad türistori asemel ristkülikukujulise impulsi moodustamisega spetsiaalselt valitud väljatransistori lülitid. Koormustakistus Rn sisaldub nende silla diagonaalis. Iga transistori "allika" ja "äravoolu" toiteelektroodid on ühendatud šuntdioodidega ja juhtahela väljundkontaktid on ühendatud "väravaga".
Juhtsignaalide automaatse töö tõttu väljastatakse koormusele erineva kestuse ja märgiga pingeimpulsse. Nende järjestus ja omadused on kohandatud väljundsignaali optimaalsete parameetritega.
Rakendatavate pingete mõjul diagonaaltakistusele, võttes arvesse mööduvaid protsesse, tekib vool, mille kuju on juba sinusoidile lähemal kui meanderil.
Raskused tehnilisel rakendamisel
Inverterite toiteahela hea toimimise tagamiseks on vaja tagada lülituslülititel põhineva juhtimissüsteemi töökindel töö. Neil on kahepoolsed juhtivad omadused ja need on moodustatud transistoride manööverdamisel pöörddioodide ühendamise teel.
Väljundpinge amplituudi reguleerimiseks kasutatakse seda kõige sagedamini impulsi laiuse modulatsiooni põhimõte valides iga poollaine impulsiala selle kestuse reguleerimise meetodil. Lisaks sellele meetodile on olemas seadmed, mis töötavad impulsi amplituudi muundamisega.
Väljundpinge ahelate moodustamise protsessis toimub poollainete sümmeetria rikkumine, mis mõjutab negatiivselt induktiivkoormuste tööd. See on kõige märgatavam trafode puhul.
Juhtsüsteemi töötamise ajal seatakse toiteahela võtmete genereerimiseks algoritm, mis sisaldab kolme etappi:
1. sirge;
2. lühis;
3. vastupidi.
Koormuses on võimalikud mitte ainult pulseerivad voolud, vaid ka suunas muutuvad voolud, mis tekitavad allikaklemmides lisahäireid.
Tüüpiline disain
Inverterite loomiseks kasutatavate paljude erinevate tehnoloogiliste lahenduste hulgas on keerukuse suurenemise seisukohast levinud kolm skeemi:
1. sild ilma trafota;
2. trafo nullklemmiga;
3. trafoga sild.
Väljundlainekujud
Inverterid on ette nähtud pinge toiteks:
-
ristkülikukujuline;
-
trapetsikujuline;
-
astmelised vahelduvad signaalid;
-
sinusoidid.
Faasimuundurid
Tööstus toodab elektrimootoreid, mis töötavad kindlates töötingimustes, võttes arvesse teatud tüüpi allikatest saadavat võimsust. Praktikas tuleb aga ette olukordi, kus erinevatel põhjustel on vaja kolmefaasilist asünkroonmootorit ühendada ühefaasilise võrguga. Selleks on välja töötatud erinevaid elektriskeeme ja seadmeid.
Energiamahukad tehnoloogiad
Kolmefaasilise asünkroonmootori staator sisaldab kolme kindlal viisil mähitud mähist, mis asuvad üksteisest 120 kraadi, millest igaüks loob oma pingefaasi voolu rakendamisel oma pöörleva magnetvälja. Voolude suund valitakse nii, et nende magnetvood täiendaksid üksteist, pakkudes rootori pöörlemisel vastastikust toimet.
Kui sellise mootori toitepinges on ainult üks faas, tuleb sellest moodustada kolm vooluahelat, millest igaüks on samuti 120 kraadi võrra nihutatud. Vastasel juhul pöörlemine ei tööta või on defektne.
Elektrotehnikas on vooluvektori pinge suhtes pööramiseks kaks lihtsat viisi, ühendades:
1. induktiivne koormus, kui vool hakkab pingest 90 kraadi võrra maha jääma;
2.Võimalus luua voolujuht 90 kraadi.
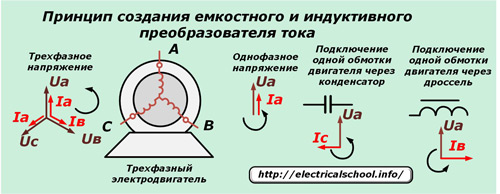
Ülaltoodud foto näitab, et pinge Ua ühest faasist saate voolu nihutada nurga all mitte 120, vaid ainult 90 kraadi võrra edasi või tagasi. Lisaks nõuab see ka kondensaatori ja õhuklapi nimiväärtuste valimist, et luua vastuvõetav mootori töörežiim.
Selliste skeemide praktilistes lahendustes peatuvad nad enamasti kondensaatorimeetodil ilma induktiivseid takistusi kasutamata. Sel eesmärgil rakendati toitefaasi pinge ühele mähisele ilma transformatsioonideta ja teisele, nihutati kondensaatorite abil. Tulemuseks oli mootori jaoks vastuvõetav pöördemoment.
Kuid rootori pööramiseks oli vaja luua täiendav pöördemoment, ühendades kolmanda mähise läbi käivituskondensaatorite. Neid on võimatu kasutada pidevaks tööks, kuna käivitusahelas tekivad suured voolud, mis suurendavad kiiresti kuumenemist. Seetõttu lülitati see ahel lühiajaliselt sisse, et saada rootori pöörlemise inertsmomenti.
Selliseid skeeme oli lihtsam rakendada, kuna üksikutest saadaolevatest elementidest moodustati kindla väärtusega kondensaatoripangad. Drosselid tuli aga iseseisvalt arvutada ja kerida, mida on raske mitte ainult kodus teha.
Parimad tingimused mootori tööks loodi aga kondensaatori ja drosselite kompleksse ühendamisega erinevates faasides koos mähiste voolude suundade valikuga ja voolu summutavate takistite kasutamisega. Selle meetodi puhul oli mootori võimsuse kadu kuni 30%.Selliste muundurite konstruktsioonid pole aga majanduslikult tasuvad, kuna tarbivad tööks rohkem elektrit kui mootor ise.
Kondensaatori käivitusahel tarbib ka suurema kiirusega elektrit, kuid vähemal määral. Lisaks on selle vooluringiga ühendatud mootor võimeline tootma veidi üle 50% võimsusest, mis saadakse tavalise kolmefaasilise toitega.
Seoses raskustega kolmefaasilise mootori ühendamisel ühefaasilise toiteahelaga ning suurte elektri- ja väljundvõimsuse kadudega on sellised muundurid näidanud oma madalat efektiivsust, kuigi need töötavad jätkuvalt üksikutes paigaldistes ja metallilõikamismasinates.
Inverterseadmed
Pooljuhtelemendid võimaldasid luua ratsionaalsemaid tööstuslikul alusel toodetud faasimuundureid. Nende konstruktsioonid on tavaliselt ette nähtud töötamiseks kolmefaasilistes ahelates, kuid neid saab konstrueerida nii, et need töötavad suure hulga erinevate nurkade all paiknevate stringidega.
Kui muundurid saavad toite ühest faasist, viiakse läbi järgmine tehnoloogiliste toimingute jada:
1. ühefaasilise pinge alaldamine dioodisõlmega;
2. stabiliseerimisahela lainete silumine;
3. alalispinge muutmine kolmefaasiliseks inversioonimeetodi tõttu.
Sel juhul võib toiteahel koosneda kolmest autonoomselt töötavast ühefaasilisest osast, nagu varem mainitud, või ühest ühisest osast, mis on kokku pandud näiteks autonoomse kolmefaasilise inverteri teisendussüsteemi järgi, kasutades neutraalset ühisjuhti.
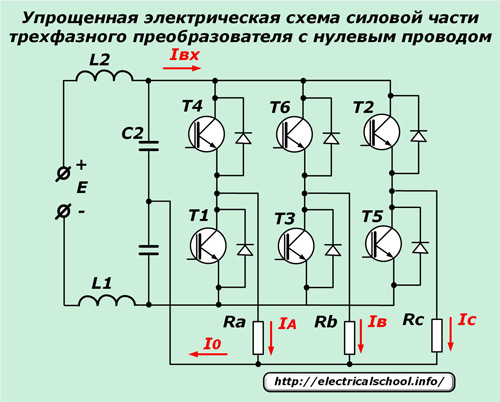
Siin töötab iga faasikoormus oma pooljuhtelementide paarid, mida juhib ühine juhtimissüsteem. Need tekitavad siinusvoolud takistuste Ra, Rb, Rc faasides, mis on neutraaljuhtme kaudu ühendatud ühise toiteahelaga. See lisab iga koormuse vooluvektorid.
Väljundsignaali puhta siinuslaine kuju lähendamise kvaliteet sõltub kasutatava vooluahela üldisest konstruktsioonist ja keerukusest.
Sagedusmuundurid
Inverterite baasil on loodud seadmed, mis võimaldavad siinusvõnkumiste sagedust laias vahemikus muuta. Selleks tehakse neile tarnitavas 50 hertsises elektrienergias järgmised muudatused:
-
püsti seisma
-
stabiliseerimine;
-
kõrgsagedusliku pinge muundamine.
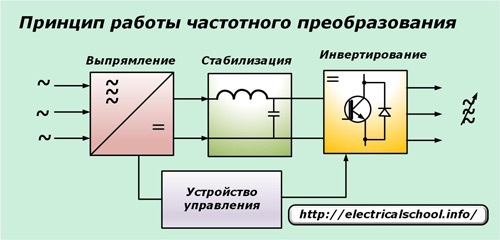
Töö põhineb samadel põhimõtetel, mis eelmiste projektide puhul, ainult et mikroprotsessorplaatidel põhinev juhtimissüsteem genereerib muunduri väljundis kümneid kilohertsi kõrgendatud sagedusega väljundpinget.
Automaatseadmetel põhinev sagedusmuundur võimaldab optimaalselt reguleerida elektrimootorite tööd käivitamise, seiskamise ja tagurdamise ajal ning mugav on muuta rootori kiirust. Samal ajal väheneb järsult välise elektrivõrgu transientide kahjulik mõju.
Loe selle kohta lähemalt siit: Sagedusmuundur - tüübid, tööpõhimõte, ühendusskeemid
Keevitusinverterid
Nende pingemuundurite põhieesmärk on säilitada stabiilne kaare põlemine ja kõigi selle omaduste, sealhulgas süüte, lihtne juhtimine.
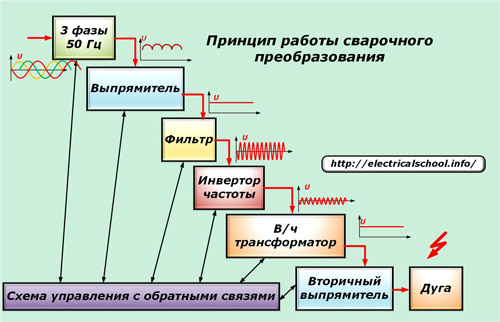
Sel eesmärgil on inverteri konstruktsioonis mitu plokki, mis teostavad järjestikust täitmist:
-
kolmefaasilise või ühefaasilise pinge korrigeerimine;
-
parameetrite stabiliseerimine läbi filtrite;
-
kõrgsageduslike signaalide ümberpööramine stabiliseeritud alalispingest;
-
muundamine / h pingeks alandava trafo abil, et suurendada keevitusvoolu väärtust;
-
väljundpinge teisene reguleerimine keevituskaare moodustamiseks.
Tänu kõrgsagedusliku signaali muundamise kasutamisele vähenevad keevistrafo mõõtmed oluliselt ja säästetakse materjale kogu konstruktsiooni jaoks. Keevitusinverterid neil on elektromehaaniliste analoogidega võrreldes suured eelised.
Trafod: pingemuundurid
Elektrotehnikas ja energeetikas kasutatakse pingesignaali amplituudi muutmiseks endiselt enim elektromagnetilisel põhimõttel töötavaid trafosid.

Neil on kaks või enam mähist ja magnetahel, mille kaudu edastatakse magnetenergiat, et muuta sisendpinge muudetud amplituudiga väljundpingeks.