Sagedusmuunduri tööpõhimõte ja selle valiku kriteeriumid kasutaja jaoks
 Asünkroonse elektrimootori juhtseadmeks sagedusmuunduri eesmärgi, tööpõhimõtte ja kriteeriumide lühikirjeldus.
Asünkroonse elektrimootori juhtseadmeks sagedusmuunduri eesmärgi, tööpõhimõtte ja kriteeriumide lühikirjeldus.
Oravapuuri asünkroonmootor täna on see kõige massiivsem ja töökindlam seade erinevate masinate ja mehhanismide juhtimiseks. Kuid igal medalil on ka tagakülg.
Asünkroonmootori kaks peamist puudust on lihtsuse võimatus rootori kiiruse reguleerimine, väga suur käivitusvool - viis, seitse korda suurem kui nimi. Kui kasutatakse ainult mehaanilisi juhtseadmeid, põhjustavad need puudused suuri energiakadusid ja mehaanilisi lööke. Sellel on äärmiselt negatiivne mõju seadmete kasutuseale.
Sageduse konverter

Sageduse konverter impulsi laiuse reguleerimisega (PE koos PWM-iga) vähendab tõmbevoolusid 4-5 korda. See tagab asünkroonmootori sujuva käivitamise ja juhib ajamit vastavalt etteantud pinge / sageduse suhtele.
Sagedusmuundur võimaldab kuni 50% energiasäästu. Võimalik on lubada tagasisidet naaberseadmete vahel, s.t. ülesande jaoks isereguleeruvad seadmed ja kogu süsteemi töötingimuste muutmine.
Sagedusmuunduri tööpõhimõte
PWM sagedusmuundur on topeltkonversiooni muundur… Esmalt alaldatakse sisenddioodsillaga võrgupinge 220 või 380 V, seejärel tasandatakse ja filtreeritakse kondensaatorite abil.
See on ümberkujundamise esimene etapp. Teises etapis konstantsest pingest, kasutades juhtmikroskeeme ja väljundsilda IGBT lülitid, moodustub teatud sageduse ja töötsükliga PWM-jada. Sagedusmuunduri väljundis väljastatakse ristkülikukujuliste impulsside paketid, kuid asünkroonmootori staatori mähiste induktiivsuse tõttu integreeritakse need ja lõpuks muutuvad siinusoidi lähedaseks pingeks.
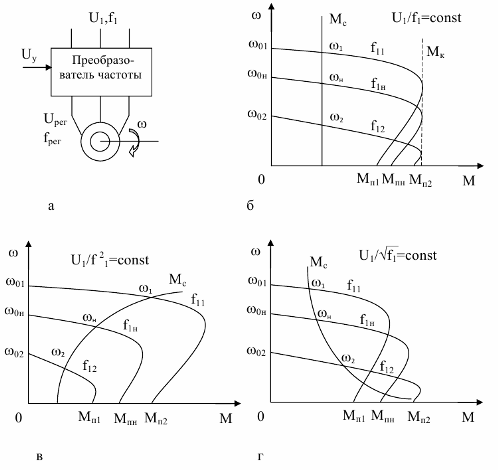 Kiiruse sagedusreguleerimisega asünkroonse elektrimootori mehaanilised omadused: a — ühendusskeem; b — püsiva staatilise takistusmomendiga koormuse karakteristikud; c — ventilaatori koormuse karakteristikud; d — staatilise koormuse pöördemomendi karakteristikud, pöördvõrdeline pöörlemise nurkkiirusega.
Kiiruse sagedusreguleerimisega asünkroonse elektrimootori mehaanilised omadused: a — ühendusskeem; b — püsiva staatilise takistusmomendiga koormuse karakteristikud; c — ventilaatori koormuse karakteristikud; d — staatilise koormuse pöördemomendi karakteristikud, pöördvõrdeline pöörlemise nurkkiirusega.
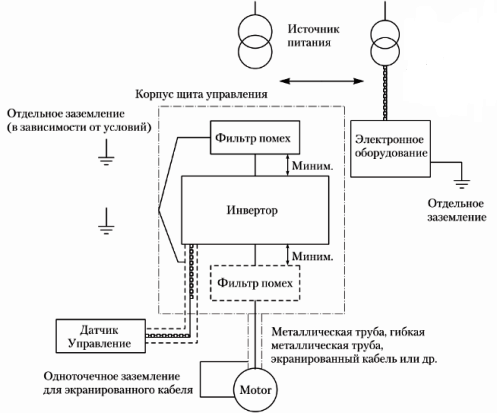 Tüüpiline ahel sagedusmuunduri sisselülitamiseks
Tüüpiline ahel sagedusmuunduri sisselülitamiseks 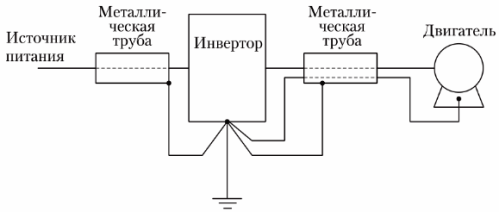 Toiteliinide (kaablite) ühendamise näide sagedusmuunduri ahelas
Toiteliinide (kaablite) ühendamise näide sagedusmuunduri ahelas
Sagedusmuundurite valiku kriteeriumid

Kontrolli meetodil
Visake kohe ära need muundurid, mis ei sobi võimsuse, jõudluse tüübi, ülekoormusvõime jms poolest. Vastavalt juhtimistüübile peate otsustama, mida valida, skalaar- või vektorjuhtimine.
Enamik kaasaegseid sagedusmuundureid rakendab vektorjuhtimist, kuid sellised sagedusmuundurid on kallimad kui skalaarsagedusmuundurid.
Vektorjuhtimine võimaldab täpsemat juhtimist, vähendades staatilist viga. Skalaarrežiim toetab ainult konstantset suhet väljundpinge ja väljundsageduse vahel, kuid näiteks ventilaatorite jaoks on see täiesti piisav.
Alates selle loomisest on vektorjuhtimine muutunud asünkroonmootorite jaoks äärmiselt populaarseks juhtimisstrateegiaks. Praegu rakendab enamik sagedusmuundureid vektorjuhtimist või isegi anduriteta vektorjuhtimist (seda tendentsi esineb sagedusmuundurites, mis algselt rakendavad skalaarjuhtimist ja millel puuduvad klemmid kiirusanduri ühendamiseks).
Vektorjuhtimise põhiprintsiip seisneb mootori magnetiseerimisvoolu ja kvadratuurvoolu eraldi sõltumatus reguleerimises, millega on võrdeline võlli mehaaniline pöördemoment. Magnetiseerimisvool määrab rootori nullvoo ühenduse väärtuse ja seda hoitakse konstantsena.
Kui kiirus stabiliseerub, genereeritakse kvadratuurvoolu seadepunkt eraldi PI-kontrolleri abil, mille sisendiks on ebakõla soovitud ja mõõdetud mootori pöörlemiskiiruse vahel. Seega on kvadratuurvool alati seatud minimaalsele tasemele, et tagada seadistatud kiiruse säilitamiseks piisav mehaaniline pöördemoment. Seetõttu on vektorjuhtimisel kõrge energiatõhusus.
Läbi võimu
Kui seadmete võimsus on ligikaudu sama, siis valige sama ettevõtte muundurid, mille võimsus on vastavalt maksimaalse koormuse võimsusele. See tagab vahetatavuse ja lihtsustab seadmete hooldust. Soovitatav on, et valitud sagedusmuunduri teeninduskeskus asuks teie linnas.
Võrgupinge kaudu
Valige alati võimalikult laia pingevahemikuga muundur, nii alla kui ka üles. Fakt on see, et kohalike võrkude jaoks võib sõna standard ainult läbi pisarate naerda. Kui madalpinge põhjustab suure tõenäosusega sagedusmuunduri seiskumise, siis suurenenud pinge võib põhjustada võrgu elektrolüütkondensaatorite plahvatuse ja seadme sisendi rikke.
Sageduse reguleerimisvahemiku järgi

Juhtsisendite arvu järgi
Juhtkäskude (käivitamine, seiskamine, tagasikäik, seiskamine jne) sisestamiseks on vaja diskreetseid sisendeid. Analoogsisendid on vajalikud tagasisidesignaalide jaoks (ajami seadistamine ja seadistamine töö ajal). Digitaalsed sisendid on vajalikud kõrgsageduslike signaalide sisestamiseks digitaalsetest kiirus- ja asendianduritest (kodeerijad). Sisendite arv ei saa kunagi olla liiga suur, kuid mida rohkem sisendeid, seda keerulisemaks saab süsteemi ehitada ja seda kallim see on.
Väljundsignaalide arvu järgi
Diskreetseid väljundeid kasutatakse erinevate sündmuste signaalide väljastamiseks (häire, ülekuumenemine, sisendpinge üle või alla taseme, veasignaal jne). Analoogväljundeid kasutatakse keerukate tagasisidesüsteemide ehitamiseks. Valikusoovitused on sarnased eelmise lõiguga.
Juhtbuss
Seadmel, millega te sagedusmuundurit juhite, peab olema sama siini ja sisendite/väljundite arv kui valitud sagedusmuunduril. Jätke tulevaste uuenduste jaoks sisendite ja väljundite jaoks natuke ruumi.
Garantii all
Garantiiaeg võimaldab kaudselt hinnata sagedusmuunduri töökindlust. Loomulikult tuleks valida pikaajalise plaaniga sagedusmuundur.Mõned tootjad näevad ette kahjujuhtumid, mida garantii ei kata. Lugege alati hoolikalt dokumentatsiooni ja otsige veebist ülevaateid seadmete mudelite ja tootjate kohta. See aitab teil teha õige valiku. Ärge säästke raha kvaliteetse teeninduse ja personali koolituse jaoks.
 Sagedusmuundur alusel
Sagedusmuundur alusel
Ülekoormusvõime
Esimese ligikaudsusena tuleks valida sagedusmuunduri võimsus 10-15% suurem kui mootori võimsus. Konverteri vool peaks olema suurem kui mootori nimivool ja veidi suurem kui võimalike ülekoormuste vool.
Konkreetse mehhanismi kirjelduses on tavaliselt märgitud ülekoormusvoolud ja nende voolu kestus. Lugege dokumentatsiooni! See hoiab teid meelelahutuses ja võib-olla hoiab ära seadmete kahjustamise tulevikus. Kui ajamile on iseloomulikud ka löök- (tipp)koormused (koormused 2-3 sekundit), siis on vaja tippvoolu jaoks valida muundur. Võtke uuesti 10% marginaali.
Vaata ka sellel teemal: VLT AQUA Drive sagedusmuundurid pumbaseadmetele