Elektriliste tõstukite ja kraanatalade elektriajam
 Rippelektrikärusid (elektrifitseeritud tõstukid, tõstukid ja kraanatalad) kasutatakse koormate ja masinaosade tõstmiseks ja teisaldamiseks monteerimis- ja remonditöödel tööstusruumides. Elektritõstukid, tõstukid ja kraanad on väiksemad kui sildkraanad, mis vähendab tööstushoonete mõõtmeid ja nende hooldus ei nõua kvalifitseeritud personali.
Rippelektrikärusid (elektrifitseeritud tõstukid, tõstukid ja kraanatalad) kasutatakse koormate ja masinaosade tõstmiseks ja teisaldamiseks monteerimis- ja remonditöödel tööstusruumides. Elektritõstukid, tõstukid ja kraanad on väiksemad kui sildkraanad, mis vähendab tööstushoonete mõõtmeid ja nende hooldus ei nõua kvalifitseeritud personali.
Riputatud elektrikärud on ette nähtud kaupade tõstmiseks ja teisaldamiseks tootmisruumides mööda rangelt määratletud rada.
Elektritõstuk (joonis 1) koosneb 3 põhiosast: tõstemehhanism (elektritõstuk), mis on ette nähtud koorma tõstmiseks (langetamiseks) ja hoidmiseks, liikumismehhanism (veermik), mis on mõeldud tõstetud koorma liigutamiseks rangelt määratletud asendi suunas. , monorelss, mis määrab horisontaalse liikumise kahes suunas.
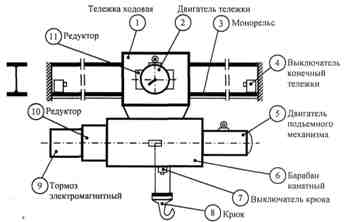
Riis. 1. Rippuva elektrivankri kinemaatiline skeem
Elektriline tõstuk on paigaldatud töökärule ja sisaldab järgmisi seadmeid: tõstemehhanismi elektrimootor (5), silindriline käigukast (10) elektrimootori pöörlemiskiiruse vähendamiseks väärtuseni, mis tagab etteantud lineaarkiiruse. konksu tõstmine (langetamine), elektromagnetpidur (9), võlli mootori seiskamiseks, kui see on vooluvõrgust lahti ühendatud või võrgust pinge kaob, rakendub vedrude jõule mõjuv piduripidur, kui võllid on mähitud ümber võlli, konksu piirlüliti (7), konksu tõstmise piiramiseks, vajutamisel lülitub mootor võrgust lahti ja aeglustub, trossitrummel (6), kerimiseks ( lahtikerimine) ja köie, konksu (8) hoidmine tõstetud koorma kinnitamiseks.
Alusvanker on paigaldatud monorelsile (3), mida toetavad topeltrööpa alumistel äärikutel olevad rattad. Rataste juhtimine läbi silindrilise käigukasti (11) elektrimootori (2) abil.
Monorail — I-tala piirlülititega (4) otstes horisontaalse liikumise piiramiseks.
Elektritõstuk TEP-1 (kandevõime 1 t, pinge 380 V) koosneb üksikute elektriajamitega tõste- ja teisaldusmehhanismidest. Töötrumlit 2 käitab mootor 20 läbi planetaarkäigukasti, mis koosneb satelliitidest 5, 7, 8, plokkhammasratastest 13, päikesehammasratastest 6, 9, kandurist 14, 15. Peaveovõll 4 on väljalülitatud mootori korral seisatud. ketaste 10 poolt vedru 11 toimel.
Tõstemehhanismi juhtimiseks kiirusega 6,5–6,9 m / s kasutatakse AOS-32-4M tüüpi suurenenud libisemisega asünkroonmootorit (võimsus 1,4 kW kiirusel 1320 p / min ja töötsükkel = 25%).Konksu ülespoole liikumist piirab piirlüliti.
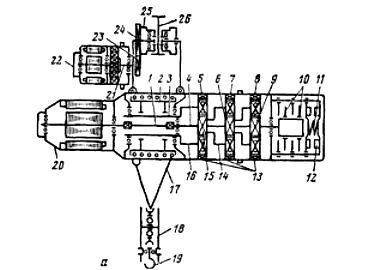
Riis. 2. Elektrilise tõstuki TEP -1 elektriajam: 1 — töötrummel, 3 — õõnesvõll, 4 — töövõll, 5, 7, 8 — satelliidid, 6, 9, 15 — päikeseülekanded, 10 — pidurikettad, 11 — pidurivedru, 12 — elektromagnetid, 13 — plokkhammasrattad, 14, 16, 21 — kandurid, 17 — tross, 18 — vedrustus, 19 — konks, 20 — elektrimootor koorma tõstmiseks, 22 — käru elektrimootor, 23, 24 — hammasrattad, 25 — rull, 26 — monorelss.
Joonisel 3 on näidatud tõstuki töö. Elektritõstuki kasutegur tõuseb 0,58-ni, kui tõstetava koorma mass tõuseb 1000 kg-ni.
Huvitav mootori 4 töörežiim koormuse langetamisel: kui koorma kaal on alla 425 kg, töötab elektrimootor mootorirežiimil ja kui mass on üle 425 kg, siis generaatori režiimis. Seetõttu piisab tõstemehhanismi tühikäigust ülesaamiseks 425 kg kaaluvast koormast.
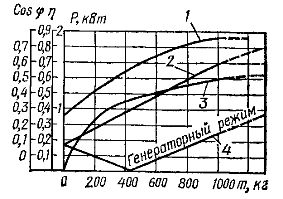
Riis. 3. Elektritõstuki tööomadused: 1 — elektrimootori ssphi, 2 — elektrimootori võimsus koorma tõstmisel, 3 — kasutegur, 4 — elektrimootori võimsus koorma langetamisel.
Elektrilise tõstuki veermiku juhtimiseks kasutatakse TEM-0,25 tüüpi asünkroonset elektrimootorit 22 (joonis 2) (võimsus 0,25 kW pööretel 1410 p/min ja töötsükkel = 25%) koos sisseehitatud üheastmelise planetaarkäigukastiga ja käik 23, 24, rullikute pöörlemist edastav 25. Lihtsamate tõstukite liikumismehhanismidele piduriseadmeid ei paigaldata. Tõstuki liikumine piki tala mõlemas suunas on piiratud mehaaniliste tõkestitega.
 Noolkraana erineb tõstukist selle poolest, et tala, millel tõstuk liigub, saab oravpuuri või faasirootori elektrimootori jõul liikuma tootmisruumis ringi. Elektrilise ajamimehhanismiga kraana talasild on valmistatud ühe tala kujul, millel liigub elektriline veermik.
Noolkraana erineb tõstukist selle poolest, et tala, millel tõstuk liigub, saab oravpuuri või faasirootori elektrimootori jõul liikuma tootmisruumis ringi. Elektrilise ajamimehhanismiga kraana talasild on valmistatud ühe tala kujul, millel liigub elektriline veermik.
Oravpuurirootoriga kolmefaasilisi asünkroonmootoreid kasutatakse päramootoriga elektriautode juhtimiseks ja ainult suure kandevõimega ning faasirootoriga koormuste-asünkroonmootorite kiiruse reguleerimise ja sujuva "maandumise" vajadusega.
Koormate sujuvaks maandumiseks või kraana täpseks seiskamiseks vajaliku väikese kiiruse puudumise tõttu peab töötaja perioodiliselt elektrimootoreid sisse ja välja lülitama ning see suurendab käivituste arvu ja põhjustab mähiste kuumenemist ning vähendab ka kontaktide kulumiskindlus. Seetõttu on mõnel kraanal tõstmiseks ja liikumiseks elektriajamid kahe töökiirusega: nimi- ja alandatud, mis tagatakse kahekiiruseliste asünkroonsete mootorite kasutamisega ühekiiruselise või täiendava mikroajami asemel.
 Madala kiirusega (0,2–0,5 m/s) rippmootoriga elektrikärusid juhitakse tavaliselt põranda (maapinna) tasandilt rippmehhanismi abil nuppude jaamad… Operaatori kabiiniga õhukärudes ja kraanates (kiirusel 0,8–1,5 m/s) juhivad faasirootoriga mootoreid kontrollerid.
Madala kiirusega (0,2–0,5 m/s) rippmootoriga elektrikärusid juhitakse tavaliselt põranda (maapinna) tasandilt rippmehhanismi abil nuppude jaamad… Operaatori kabiiniga õhukärudes ja kraanates (kiirusel 0,8–1,5 m/s) juhivad faasirootoriga mootoreid kontrollerid.
Tõstukite ja sildkraanade elektrimootoreid juhib pööratavad magnetkäivitajad ja painduva soomustatud kaabli külge riputatud käivitusnupud.Pinge kontaktorite mähistele ja kontaktidele KM1 tõstmiseks (joonis 4), KM2 langetamiseks, KMZ edasi-tagasi liigutamiseks KM4 tarnitakse kaitselüliti ja kaabli või kontaktjuhtmete kaudu. Tõsteseadme liikumist ülespoole piirab piirlüliti. SQ.
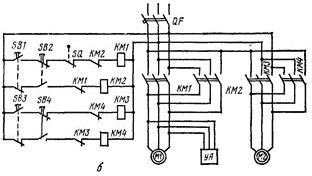
Riis. 4. Kraana-tala elektriline skemaatiline diagramm
Mootorite tagurduskontaktorite blokeerimine samaaegse sisselülitamise eest toimub kaheahelaliste nuppude ja kontaktorite endi mehaanilise blokeerimise (või kontaktorite abikontaktide avamise) abil.
Elektrilistel tõstukitel ja sildkraanadel ei lähe käivitusnuppudest mööda vastavad sulgemiskontaktori blokeerimiskontaktid, mis takistab tõstuki töö jätkamist pärast seda, kui operaator vabastab surunupu rippjaama. Samaaegselt tõstemootoriga käivitatakse UA solenoid, mis avab piduri.
Tõstemehhanismide maksimaalne lubatud käivitusaeg on 3 — 5 s, liikumismehhanismidel — 10 — 15 s.
Näete ka: Elektriliste tõstukite elektriseadmed ja ketid
Elektriveokite, elektritõstukite ja sildkraanade mootorite töörežiim sõltub nende otstarbest. Kui kaupa liigutatakse sildkraanadel lühikesi vahemaid, töötavad mootorid häbiväärsel lühiajalisel režiimil (näiteks töökodade või ladude sektsioone teenindavates kärudes).

Üle tehase territooriumi suhteliselt suurte vahemaade tagant kaupu transportivate sildkraanade puhul on tõste- ja teisaldusmootorite töörežiimid erinevad: esimest iseloomustab lühiajaline, teist pikaajaline režiim. Elektritõstukite, tõstukite ja pukk-kraanade tõstmise ja teisaldamise mootorite osa määratakse kindlaks samamoodi nagu sildkraanamehhanismide mootorite puhul.