Reisimikrolülitid: seade ja tehnilised omadused
Elektrotehnikas kasutatakse laialdaselt mikrolüliteid, mis on suure töökindlusega, kuid väiksema lülitusvõimega kui tavakonstruktsiooniga piirlülititel.
Lüliti mikrolülitite jaoks vahelduvvoolu kuni 2,5 A pingel 380 V. Mikrolüliti töökäik on 0,2 mm, lisakäik 0,1 mm. Jõud edasiliikumise ajal on (4–6) N.
Joonisel fig. 1 ja näitab MP6000 seeria mikrolüliti disaini. Plastkorpuses 1 on fikseeritud kontaktid 8 ja 9, mis on kinnitatud metallpuksidele 7 ja 10. Kangi tüüpi liikuv kontakt 5 on valmistatud kahe pikisuunalise piluga lamevedru kujul. Vedru on kinnitatud hülsi 2 külge ja selle otsaosad toetuvad kahvlile 3; painutades moodustavad nad kohese lülitusseadme. Mikrolüliti käituselement koosneb tõukurist 4, mis läheb korpuse kaanes 6 olevasse auku, mis on ühendatud korpusega tihvti 11 abil. Tõukuri alumisel osal on sfäärilise pinnaga plastikust seib.
Piiraja mõjul vajutab tõukur lamevedru 5 keskosale, mis otseses käivitusasendis liigub koheselt teise stabiilse tasakaalu asendisse, lülitades mikrolüliti kontakte. Mikrolüliti välised ühendused tehakse klemmide 12 kaudu.
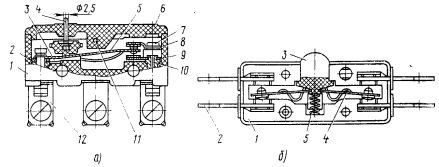
Mikrolülitid: a — MP6000 seeria, b — VP61 tüüp
Joonisel fig. 1b kujutab VP61 mikrolüliti diagrammi, millel on kahekordse kaitselülitiga sildkontaktid. See võimaldab väikeste mõõtmetega mikrolülitil lülitada vahelduvvoolu 6 A.
 Mikrolüliti koosneb korpusest 1, fikseeritud kontaktidega kontaktraamidest 2 ja plastikust tõukurist 3. Sillakontakt on tehtud lõhkeva vedru kujul, millel on kaks stabiilset asendit. Tõukuri liigutamisel klõpsab mikrolüliti vedru ja avavad koheselt lülituskontaktid. Algasendisse naasmine viiakse läbi kuni vedruni 5.
Mikrolüliti koosneb korpusest 1, fikseeritud kontaktidega kontaktraamidest 2 ja plastikust tõukurist 3. Sillakontakt on tehtud lõhkeva vedru kujul, millel on kaks stabiilset asendit. Tõukuri liigutamisel klõpsab mikrolüliti vedru ja avavad koheselt lülituskontaktid. Algasendisse naasmine viiakse läbi kuni vedruni 5.
Seal on avatud disainiga mikrolülitid, mis on automaatikaseadmesse sisse ehitatud.
Joonisel fig. 2 on näide sellisest lülitist koos sulgemismehhanismiga. See koosneb vedrukangi kontaktplokist 1 koos lülituskontaktidega, rullikuga kangitõukurist 2 ja lamedast kiirendusvedrust 3. Rulli vajutamisel hoob 2 pöörleb ja vedru 3 lülitab mikrolüliti liikuvat kontakti. Kontaktsurve määratakse ainult kontaktsõlme seadistusega ja see praktiliselt ei muutu kangi 2 edasise pööramisega.
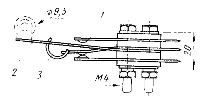
Avatud teega mikrolüliti
Mikrokäigulülititel on väga vähe täiturmehhanismi lisakäiku.See nõuab juhtseadise täpset täitmist ja muutumatut kaugust mikrolüliti korpuse ja piiraja telje vahel. Kui neid tingimusi on raske täita, kasutage vahepealseid mehaanilisi elemente, mis suurendavad mikrolüliti lisakäiku. Need võivad olla sisemise vedruga teleskooppeatused, esimest või teist tüüpi hoovad, nukkmehhanismid, mille liikumissuund on risti mikrolülitite ajami elemendi liikumissuunaga.

Mikroläheduslülitid
Kasvavad nõuded diskreetse automaatika asendisüsteemide kiirusele, täpsusele ja töökindlusele määrasid vajaduse läheduslülitite järele... Kontaktivabad liikumislülitid võib jagada kolme rühma.
Esimese rühma mittekontaktsetes piirlülitites puudub otsene mehaaniline koostoime tööpingi liikuva ploki ja ajamielemendi vahel. Selliste lülitite lülitusseade on kontaktikujundusega.
Teise rühma lülitites on lülitusseade vastupidi tehtud kontaktivabaks ja masina mehhanismil on otsene kontakt lüliti ajamiseadmega. Selliseid piirlüliteid võib nimetada elektriliselt mittekontaktseks.
Lõpuks on kolmanda rühma lõpplülitid täiesti kontaktivabad seadmed, milles tööpinkide liikumine edastatakse kontaktivabalt lõpplülitile ja seejärel muudetakse ka kontaktivabalt elektrisignaaliks. Selliseid piirlüliteid nimetatakse mõnikord staatilisteks.
Näiteks on pilliroolülititega liikuvad mikrolülitid… Kõrge töökindlus, kiire reageerimine, pilliroolülitite väiksus muudavad need lülitid paljulubavaks kasutamiseks erinevates masinaehituse valdkondades.
Tööpõhimõte Reed Switch Rändavad mikrolülitid Selgitame joonise fig. 3. Lõpplüliti koosneb ristkülikukujulisest püsimagnetist 1 (joonis 3, a), mis on kinnitatud masina liikuvale plokile, ja pilliroolülitist 2, mis on paigaldatud fikseeritud põhiosale. Magneti telg on paralleelne pilliroo lüliti pirni teljega.
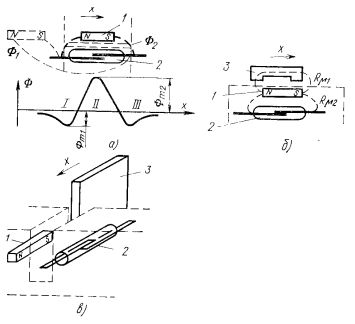
Reed-lüliti mikrolülitid: a, 6 — lame disain liikuva magneti ja liikuva šundiga, b — pilu disain ferromagnetilise varjega
Pilliroolülitit läbiva magnetvoo muutus on keeruline. Algselt, kui pilliroo lüliti ja magneti vaheline kaugus on suur, sulgub magnetvoog roolüliti pilus mööda teed F1 (punktiirjoon joonisel 3, a). See voog šunteeritakse seejärel ühe pilliroo lüliti vedruga ja vähendatakse nullini, mille järel magnetvoo suund muutub vastupidiseks, kuna magnetpooluste asukohta pilliroo lüliti plaatide suhtes muudetakse. See voog on tähistatud kui F2.
Pilliroo lülitit saab vajutada kolm korda mööda liikumisteed tsoonides / — ///. Kui pilliroo lüliti selline tööjada on vastuvõetamatu, siis tuleb magnetsüsteem arvutada nii, et Фm1 oleks pilliroo lüliti käivitamise voog väiksem.Seda saab saavutada püsimagneti konfiguratsiooni ning magneti ja pilliroo lüliti vahelise pilu muutmisega.
Joonisel fig. 3b on näide kompaktsemast piirlülitist, kus püsimagnet 1 ja pilliroolüliti 2 asuvad ühes korpuses ja on masina külge kinnitatud.