Mikrofoni tööpõhimõte, mikrofonide tüübid
Heli vibratsiooni elektrivooluks muutmiseks kasutatakse spetsiaalseid elektroakustilisi seadmeid, mida nimetatakse mikrofonideks. Selle seadme nimi on seotud kahe kreekakeelse sõna kombinatsiooniga, mis on tõlgitud kui "väike" ja "hääl".
Mikrofon on õhus leiduvate akustiliste vibratsioonide muundur elektriliseks vibratsiooniks.

Mikrofoni tööpõhimõte seisneb selles, et helivibratsioonid (tegelikult õhurõhu kõikumised) mõjutavad seadme tundlikku membraani ja juba membraani vibratsioonid põhjustavad elektrivibratsiooni teket, kuna detailiga on ühendatud membraan. elektrivoolu genereerivast seadmest, mille seade sõltub konkreetse mikrofoni tüübist.
Ühel või teisel viisil kasutatakse tänapäeval mikrofone laialdaselt erinevates teadus-, tehnika-, kunsti- jne valdkondades. Neid kasutatakse heliseadmetes, mobiilsetes vidinates, kõnesides, helisalvestuses, meditsiinilises diagnostikas ja ultraheliuuringutes.need toimivad anduritena ja paljudes teistes inimtegevuse valdkondades ei saa ühel või teisel kujul lihtsalt ilma mikrofonita hakkama.

Mikrofonidel on erinev konstruktsioon, kuna erinevat tüüpi mikrofonides põhjustavad elektrilisi võnkumisi erinevad füüsikalised nähtused, millest peamised on: elektritakistus, elektromagnetiline induktsioon, võimsuse muutus ja piesoelektriline efekt... Tänapäeval saab seadme põhimõtte järgi eristada kolme peamist tüüpi mikrofone: dünaamiline, kondensaator ja piesoelektriline. Kohati on aga seni saadaval ka süsinikmikrofonid ja nendega alustame oma ülevaadet.
Süsinikmikrofon
1856. aastal prantsuse teadlane Du Monsel avaldas oma uurimuse, mis näitas, et isegi grafiitelektroodide kokkupuutepinna väikese muutusega muutub nende vastupidavus elektrivoolule üsna oluliselt.
Kakskümmend aastat hiljem Ameerika leiutaja Emil Berliner lõi selle efekti põhjal maailma esimese süsinikmikrofoni. See juhtus 4. märtsil 1877. aastal.
Berlineri mikrofoni töö põhines just nimelt süsinikvarraste kontakti omadusel muuta vooluahela takistust juhtiva kontaktpinna muutumise tõttu.

Juba 1878. aasta mais anti leiutise väljatöötamine David Hughes, kes paigaldas söetopside paari vahele teravate otstega grafiitvarda ja selle külge kinnitatud membraani.
Kui membraan vibreerib sellele mõjuva heli mõjul, muutub ka varda kontaktpind tassidega ja samamoodi muutub ka selle elektriahela takistus, millega varras on ühendatud. Selle tulemusena muutus voolutugevus ahelas pärast heli vibratsiooni.
Thomas Alva Edison läks veelgi kaugemale – ta asendas varda söetolmuga. Süsinikmikrofoni kuulsaima disaini autor on Anthony White (1890). Just neid mikrofone võib veel leida vanade analoogtelefonide peakomplektidest.

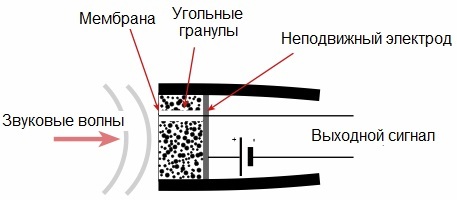
Süsinikmikrofon on disainitud ja töötab järgmiselt. Suletud kapslisse suletud süsinikupulber (graanulid) asub kahe metallplaadi vahel. Üks kapsli ühel küljel asuvatest plaatidest on ühendatud membraaniga.
Kui heli mõjutab membraani, siis see vibreerib, kandes vibratsiooni edasi süsiniku tolmule. Tolmuosakesed vibreerivad, muutes aeg-ajalt üksteisega kokkupuuteala. Seega kõigub ka mikrofoni elektritakistus, muutes voolu vooluringis, kuhu see on ühendatud.
Esimesed mikrofonid ühendati järjestikku galvaanilise akuga pingeallikana.
Kui selline mikrofon on ühendatud trafo primaarmähisega, on võimalik selle sekundaarmähist kõrvaldada heli, mis kõigub ajas koos membraanile mõjuva heliga. Pinge… Süsinimikrofonil on kõrge tundlikkus, mis võimaldab seda mõnel juhul kasutada ka ilma võimendita. Kuigi süsinikmikrofonil on märkimisväärne puudus — oluliste mittelineaarsete moonutuste ja müra olemasolu.
Kondensaatormikrofon
Kondensaatormikrofoni (mis põhineb elektrilise võimsuse muutmise põhimõttel heli mõjul) leiutas Ameerika insener Edward Wente aastal 1916Kondensaatori võime muuta mahtuvust sõltuvalt plaatide vahelise kauguse muutumisest oli juba sel ajal hästi teada ja uuritud.
Niisiis toimib üks kondensaatoriplaatidest siin õhukese helitundliku liigutatava membraanina. Membraan osutub oma õheduse tõttu kergeks ja tundlikuks, kuna selle valmistamiseks kasutatakse traditsiooniliselt õhukest plastikut, millel on kõige õhem kulla- või niklikiht. Vastavalt sellele peab teine kondensaatoriplaat olema fikseeritud paigal.
Kui vahelduv helirõhk mõjutab õhukest plaati, paneb see vibreerima või liigub teise kondensaatoriplaadi poole ja seejärel sellest eemale. Sel juhul varieerub ja muutub seda tüüpi muutuva kondensaatori elektriline võimsus. Selle tulemusena on elektriahelas, milles see kondensaator on, elektrit võnkumine, mis kordab membraanile langeva helilaine kuju.
Plaatide vaheline töötav elektriväli luuakse kas välise pingeallika (nt aku) abil või algselt ühe plaadi kattekihina polariseeritud materjali kandmisega (elektreetmikrofon on kondensaatormikrofoni tüüp).
Siin tuleb kasutada eelvõimendit, kuna signaal on väga nõrk, kuna heli mahtuvuse muutus osutub äärmiselt väikeseks, vibreerib membraan vaevumärgatavalt. Kui eelvõimendi ahel suurendab helisignaali amplituudi, suunatakse juba võimendatud signaal võimendile… Siit ka kondensaatormikrofonide esimene eelis — nad on ülitundlikud isegi väga kõrgetel sagedustel.
Dünaamiline mikrofon
Dünaamilise mikrofoni sünd on Saksa teadlaste au Gervin Erlach ja Walter Schottky… 1924. aastal tutvustasid nad uut tüüpi mikrofoni, dünaamilist mikrofoni, mis ületas lineaarsuse ja sageduskarakteristiku poolest tunduvalt oma süsiniku eelkäijat ning ületas oma esialgsete elektriliste parameetrite poolest kondensaatori analoogi. Nad asetasid magnetvälja väga õhukesest (umbes 2 mikroni paksusest) alumiiniumfooliumist gofreeritud lindi.

1931. aastal täiustasid mudelit Ameerika leiutajad. Tøres ja Vente… Nad pakkusid dünaamilist mikrofoni koos induktiivpooliga… Seda lahendust peetakse endiselt salvestusstuudiote jaoks parimaks.
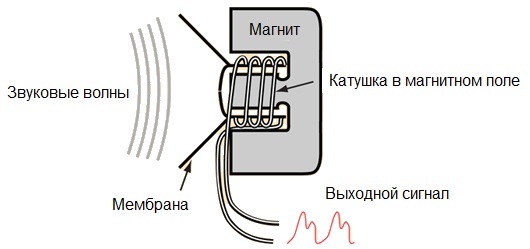
Dünaamiline mikrofon põhineb elektromagnetilise induktsiooni nähtus… Membraan on kinnitatud õhukese vasktraadi külge, mis on ümbritsetud püsivas magnetväljas kerge plasttoru ümber.
Helivõnked mõjuvad membraanile, membraan vibreerib, korrates helilaine kuju, edastades samal ajal oma liigutused juhtmele, liigub traat magnetväljas ja (vastavalt elektromagnetilise induktsiooni seadusele) indutseeritakse elektrivool. juhtmes, korrates heli kuju, langedes membraanile.
Kuna plasttoega traat on üsna kerge konstruktsiooniga, osutub see väga liikuvaks ja väga tundlikuks ning elektromagnetilise induktsiooni tekitatud vahelduvpinge on märkimisväärne.
Elektrodünaamilised mikrofonid jagunevad mähismikrofonideks (mis on magneti rõngakujulises vahes membraaniga), lintmikrofonideks (milles mähise materjaliks on gofreeritud alumiiniumfoolium), isodünaamilisteks jne.
Klassikaline dünaamiline mikrofon on töökindel, helisagedusvahemikus laia amplituuditundlikkusega ja selle tootmine on odav. Kuid see ei ole kõrgetel sagedustel piisavalt tundlik ja reageerib halvasti äkilistele helirõhu muutustele – need on selle kaks peamist puudust.
Dünaamiline lintmikrofon erineb selle poolest, et magnetvälja tekitab pooluste tükkidega püsimagnet, mille vahel on õhuke alumiiniumriba, mis asendab vasktraati.
Lindil on kõrge elektrijuhtivus, kuid indutseeritud pinge on väike, seega tuleb see vooluringi lisada astmeline trafo… Kasulik helisignaal eemaldatakse sellises vooluringis trafo sekundaarmähise abil.
Dünaamilise lintmikrofoni sagedusvahemik on erinevalt tavalisest dünaamilisest mikrofonist väga ühtlane.
Püsimagnetmaterjalina kasutatakse mikrofonides kõrge jääkinduktsiooniga kõvasid magnetsulameid (nt NdFeB). Korpus ja rõngas on valmistatud pehmetest magnetsulamitest (nt elektriterasest või permaloidist).
Piesoelektriline mikrofon

Vene teadlased Rževkin ja Jakovlev rääkisid 1925. aastal uue sõna helitehnoloogias. Nad pakkusid välja põhimõtteliselt uue lähenemisviisi heli muundamiseks vooluvõnkudeks – piesoelektrilise mikrofoni. Helirõhu toime puutub kokku piesoelektriline kristall.
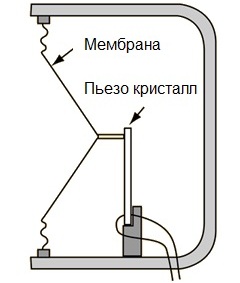
Heli mõjub vardaga ühendatud membraanile, mis omakorda on kinnitatud piesoelektri külge. Piesokristall deformeerub varda vibratsiooni mõjul ja selle klemmidele ilmub pinge, mis kordab langeva heli kuju. Seda pinget kasutatakse kasuliku signaalina.