Ampermeeter ja voltmeeter seade
Algselt olid voltmeetrid ja ampermeetrid ainult mehaanilised ning alles palju aastaid hiljem, mikroelektroonika arenedes, hakati tootma digitaalseid voltmeetreid ja ampermeetreid. Sellest hoolimata on mehaanilised arvestid populaarsed. Võrreldes digitaalsetega on need häiretele vastupidavad ja annavad mõõdetud väärtuse dünaamikast visuaalsema ülevaate. Nende sisemised mehhanismid jäävad praktiliselt samaks kui esimeste voltmeetrite ja ampermeetrite kanoonilised magnetoelektrilised mehhanismid.

Selles artiklis vaatleme tüüpilise sihverplaadi seadet, et iga algaja mõistaks voltmeetrite ja ampermeetrite tööpõhimõtteid.

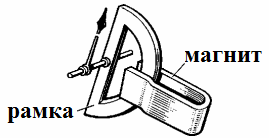
Osutimõõteseade kasutab oma töös magnetoelektrilist põhimõtet. Püsimagnet, millel on väljendunud poolusetükid, on oma kohale fikseeritud. Nende pooluste vahele kinnitatakse terassüdamik nii, et südamiku ja magneti pooluseosade vahele tekib õhupilu püsimagnetväli.
Pilusse sisestatakse liigutatav alumiiniumraam, millele on keritud väga õhukese traadi mähis.Raam on kinnitatud telje võllidele ja seda saab rihmarattaga pöörata. Seadme nool on kinnitatud spiraalvedrudega raami külge. Mähisele antakse vedrude kaudu vool.
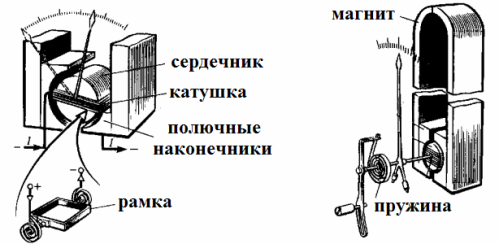
Kui mähise juhtmest läbib vool I, siis, kuna mähis on asetatud magnetvälja ja vool selle juhtmetes voolab risti, ületades pilus olevaid magnetvälja jooni, tekib pöörlev jõud pooli küljelt. magnetväli hakkab sellele mõjuma. Elektromagnetiline jõud loob pöördemomendi M ja mähis koos raami ja käega pöörleb läbi teatud nurga α.
Kuna magnetvälja induktsioon pilus on muutumatu (püsimagnet), on pöördemoment alati võrdeline mähises oleva vooluga ja selle väärtus sõltub voolutugevusest ja selle seadme konstantsetest konstruktsiooniparameetritest (c1 ). See hetk on võrdne:
Vedrude olemasolust tulenev raami pöörlemist takistav reaktsioonimoment on võrdeline vedrude väändenurgaga, see tähendab liikuva osaga ühendatud noole pöördenurgaga:
Sel viisil jätkub pöörlemine seni, kuni kaadris oleva voolu tekitatud hetk M võrdub vedrude vastumomendiga Mpr, st kuni tasakaalu saabumiseni. Sel hetkel nool peatub:
Ilmselgelt on vedrude pöördenurk proportsionaalne raami vooluga (ja mõõdetud vooluga), mistõttu on magnetoelektrisüsteemi seadmetel sama skaala. Proportsionaalsustegurit k noole pöördenurga ja mõõdetud voolu ühiku vahel nimetatakse seadme tundlikkuseks.
Pöördväärtust nimetatakse skaala jaotuseks või ühikukonstandiks. Mõõdetud väärtus määratakse jagatuna väärtusega skaala jaotuste arv.
Et vältida liigutatava raami häirivaid vibratsioone noole ühest asendist teise üleminekul, kasutatakse nendes seadmetes magnetinduktsiooni või õhuklappe.
Magnetilise induktsiooni siiber on alumiiniumist plaat, mis on fikseeritud seadme pöörlemisteljele ja liigub alati koos noolega püsimagneti väljas. Tekkivad pöörisvoolud aeglustavad mähist.Järeldus on, et Lenzi reegli kohaselt takistavad plaadis olevad pöörisvoolud, mis interakteeruvad neid tekitanud püsimagneti magnetväljaga, plaadi liikumist ja plaadi võnkumisi. nool vaibub kiiresti. Sellise magnetilise induktsiooniga amortisaatori rolli mängib alumiiniumraam, millele mähis on keritud.
Raami pööramisel muutub alumiiniumraami läbiva püsimagneti magnetvoog, mis tähendab, et alumiiniumraamis indutseeritakse pöörisvoolud, mis püsimagneti magnetväljaga suheldes avaldavad pidurdavat toimet ning käe võnkumised peatuvad.
Magnetoelektriliste seadmete õhusiibrid on silindrilised kambrid, mille sisse on paigutatud kolvid, mis on ühendatud seadmete liikuvate süsteemidega. Liikuva osa liikumisel peatatakse tiivakujuline kolb kambris ja nõela võnkumised summutatakse.
Nõutava mõõtetäpsuse saavutamiseks ei tohi seadet mõõtmise ajal mõjutada gravitatsioon ning noole läbipaine peab olema seotud ainult pöördemomendiga, mis tekib mähise voolu vastasmõjul püsimagneti magnetväljaga ja raami vedrustus vedrude abil.
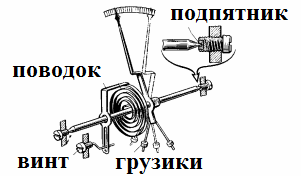
Raskusjõu kahjuliku mõju välistamiseks ja sellega kaasnevate vigade vältimiseks lisatakse seadme liikuvale osale vastukaalud varrastel liikuvate raskuste näol.
Hõõrdumise vähendamiseks on terasotsad valmistatud poleeritud kulumiskindlast terasest või volframi-molübdeeni sulamist ning laagrid kõvast mineraalist (ahhaat, korund, rubiin jne). Otsa ja tugilaagri vahekaugust reguleeritakse seadistuskruviga.
Noole nulli lähteasendisse täpseks seadmiseks on seade varustatud korrektoriga. Sihverplaadis olev korrektor on välja keeratud ja vedruga rihmaga ühendatud. Kruvi abil saate spiraali piki telge veidi liigutada, reguleerides seeläbi noole algset asukohta.
Enamikul kaasaegsetel seadmetel on liikuv osa, mis on riputatud kanderaamide paari külge elastsete metallribade kujul, mis annavad voolu mähisele ja loovad voolava pöördemomendi. Klambrid on omavahel ühendatud lamedate vedrude paariga, mis asuvad üksteisega risti.
Ausalt öeldes märgime, et lisaks ülalkirjeldatud klassikalisele mehhanismile on olemas ka seadmeid, millel pole mitte ainult U-kujulised magnetid, vaid ka silindrilised magnetid ja prismakujulised magnetid ja isegi sisemise raamiga magnetid, mis ise võivad ise olla teisaldatavad.
Voolu või pinge mõõtmiseks lülitatakse magnetoelektriline seade alalisvooluahelasse vastavalt ampermeetri või voltmeetri ahelale, erinevus on ainult pooli takistuses ja seadme vooluahelaga ühendamise ahelas. Loomulikult ei tohiks kogu mõõdetud vool voolu mõõtmisel läbi seadme mähise minna ja pinget mõõtes ei tohiks ka palju voolu kuluda. Mõõteseadme korpusesse sisseehitatud täiendav takisti aitab luua sobivaid tingimusi.
Voltmeetri ahela lisatakisti takistus ületab mitu korda mähise takistuse ja see takisti on valmistatud metallist, millel on äärmiselt väike temperatuuri takistustegurnagu manganiin või konstantaan. Ampermeetris oleva mähisega paralleelselt ühendatud takistit nimetatakse šundiks.
Šundi takistus, vastupidi, on mitu korda väiksem kui mõõtetöömähise takistus, seetõttu läbib mähise traati ainult väike osa mõõdetud voolust, samas kui põhivool voolab läbi šundi. Täiendav takisti ja šunt võimaldavad seadme mõõtepiirkonda laiendada.
Seadme noole kõrvalekalde suund sõltub mõõtepooli läbiva voolu suunast, seetõttu on seadme vooluringiga ühendamisel oluline jälgida polaarsust õigesti, vastasel juhul liigub nool teises suunas . Sellest tulenevalt ei sobi kanoonilisel kujul olevad magnetoelektrilised seadmed vahelduvvooluahelaga ühendamiseks, kuna nõel lihtsalt vibreerib, jäädes ühte kohta.
Magnetoelektriliste seadmete (ampermeetrid, voltmeetrid) eelisteks on aga suur täpsus, skaala ühtlus ja vastupidavus väliste magnetväljade tekitatud häiretele. Puuduseks on sobimatus vahelduvvoolu mõõtmiseks (vahelduvvoolu mõõtmiseks tuleb see esmalt parandada), polaarsuse jälgimise nõue ja mõõtepooli õhukese traadi haavatavus ülekoormuse suhtes.