Faasimõõturid ja sünkroskoopid
 Faasimõõtureid kasutatakse näiteks vahelduvvoolu faasinurga määramiseks seda põhjustava pinge suhtes.
Faasimõõtureid kasutatakse näiteks vahelduvvoolu faasinurga määramiseks seda põhjustava pinge suhtes.
Faasimõõturi mõõtemehhanismi statsionaarne osa sisaldab kolme pooli, millest kaks 1 ja 2 on raami kujuga. Neid nihutatakse üksteise suhtes 120 ° nurga all (joonis 1, a). Silindriline mähis 3 asub mähiste 1 ja 2 sees liikuva osaga koaksiaalselt.
Liigutatava osa moodustab telg 4, mille otste külge on kinnitatud südamikud 5 õhukeste plaatide kujul, mis on üksteisest 180 ° nihkes ja mida nimetatakse kroonlehtedeks. Telg ja kroonlehed on valmistatud pehmest magnetmaterjalist ja moodustavad Z-kujulise struktuuri (joon. 1, b). Mõõtemehhanismil ei ole vedru tekitatud vastandmomenti, seetõttu saab kõnealust seadet omistada suhetele.
Joonisel fig. 2 näitab faasimõõturi sisselülitamise skeemi. Mähised 1 ja 2 sisalduvad kolmefaasilise liini kahe juhtme lõikes ja mähis 3 on järjestikku takistiga Rd, millel on märkimisväärne aktiivtakistus, mis on ühendatud võrgupingega.Nende mähiste kaudu voolavad lineaarsed voolud nihutatakse üksteise suhtes faasis 120 ° võrra, millega seoses loovad mähised 1 ja 2 pöörleva magnetvoo Ф12, justkui kujutaksid nad koormusvoolu vektorit. Selle pöörlemise sagedus sõltub voolude I1 ja I2 sagedusest... Ühes perioodis teeb vool F12 ühe täispöörde.
Kuna takisti Rq takistus on suur võrreldes mähise 3 reaktantsiga, siis on vool Az3 faasis liinipingega. Mähis 3 tekitab voolu sinusoidaalse muutuse tulemusena pulseeriva magnetvoo F3, mis on lähedane sinusoidsele. Selle voolu sümmeetriatelg on ruumis fikseeritud ja langeb alati kokku mehhanismi liikuva osa teljega. Voog F3 on suletud piki liikuva osa, kroonlehtede ja fikseeritud välise silindrilise magnetahela telge 4.
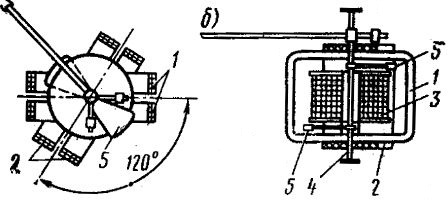
Riis. 1. Z-kujulise südamiku elektromagnetilise süsteemi suhte mõõtmise mehhanism
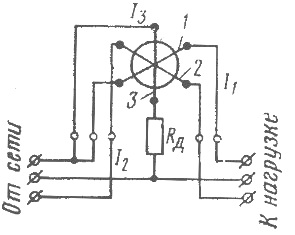
Riis. 2. Elektromagnetsüsteemi faasimõõturi skeem
Erinevates tasapindades suletud vood F12 ja F3 magnetiseerivad mõõtemehhanismi liikuvat osa. Kuna voo Ф12 väärtus on konstantne, saavutab telje ja kroonlehtede magnetiseeritus suurima väärtuse hetkel, mil voog Ф3 läbib suurimat väärtust. Inertsiaalsete jõudude toimel on liikuv osa fikseeritud liikumatult asendis, mis vastab selle suurimale magnetiseeritusele, st pöörleva voo Ф12 asendile hetkel, mil voog Ф3 saavutab maksimaalse väärtuse.
Tuleb meeles pidada, et pöörleva voo asend seadme statsionaarse osa suhtes voo Ф3 ja voolu Аз3 läbimise hetkel amplituudi väärtusest sõltub koormusvoolu vahelisest nurga φ muutusest. ja pinge. Seda arvestades on liikuva osa (ja vastavalt ka seadme osuti) hõivatud asend skaala suhtes, s.o. nurk α iseloomustab faasinihet koormusvoolu ja pinge vahel.
Sellel põhimõttel töötav fasomeeter mõõdab faasinihkeid mahtuvusliku ja induktiivse koormusega. Seadme skaalat saab gradueerida nurkväärtustega φ või cosφ... Esimesel juhul on see ühtlane, teisel juhul ebaühtlane.
Fasomeeter Ts302
Sünkronoskoobid
Vaadeldavat mõõtemehhanismi kasutatakse ka sünkrooskoobis – seadmes, mida kasutatakse sünkroongeneraatorite ühendamisel paralleelseks tööks.
Sünkroskoobi sisselülitamise skeem on näidatud joonisel fig. 3.
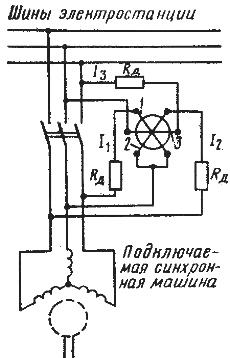
Riis. 3. Elektromagnetsüsteemi sünkronoskoobi skeem
Mõõtemehhanismi poolide 1, 2 ja 3 ehitus on sarnane faasimõõturi vastavate mähiste ehitusega, kuid need on valmistatud õhukesest suure keerdude arvuga vasktraadist, mille tulemusena mähised omavad märkimisväärset vastupanu. Mähis 3 on ühendatud võrgu liinipingega, mähised 1 ja 2 — ühendatud sünkroonmasina liinipingetega. Takistid on ühendatud järjestikku mähistega R ja nii edasi.
Nagu mainitud, on mõõtemehhanismi liikuv osa paigaldatud kolme mähise tekkivasse magnetvälja nii, et liikuva osa labade telg langeb kokku pöörleva välja Ф12 suunaga, milles see kinni haarab. pulseeriva välja amplituudi väärtus F3.
See liikuva osa labade asend mähiste mähistes sama voolu sagedusel sõltub faasinihkest voolude I1 ja Az2 vahel mähiste 1, 2 mähistes ja voolust Az3 mähistes. mähis 3. Voolud I1 ja Az2 langevad praktiliselt faasis kokku sünkroongeneraatori liinipingega ja vool Az3 — võrgupingega (takisti takistusest Rq on suur).
Selle tulemusena ° С Seega näitab sünkroskoobi näidik, kui võrguvoolu ja ühendatud generaatori sagedused on võrdsed, otseselt faasinihet nende kolmefaasiliste süsteemide pingete vahel.
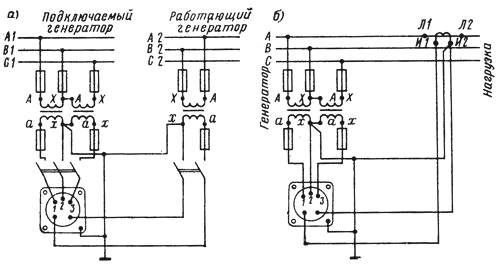
Riis. 4. Ühendusskeemid: a — sünkroskoop, b — elektromagnetsüsteemi fasomeeter

Riis. 5. Sünkronoskoop tüüp E1605
Sünkroniseerimisel ei ole võrguvoolu sagedus ja ühendatud generaatori vool samad. Selle tulemuseks on pidev faasinurga muutus liinipinge ja e vahel. jne. v. generaator ja seetõttu kroonlehtede asukoha muutumine statsionaarsete mähiste suhtes. Kuna sünkroskoobi liikuvat osa saab pöörata mis tahes nurga alla, siis kursor pöörleb.
Pöörlemissuund sõltub võrgu ja ühendatud generaatori sageduse erinevuse märgist. Mida väiksem see erinevus, seda aeglasem on sünkroskoobi osuti pöörlemine.
Seadme skaalal on pingevektorite antifaasiasendile vastav märk ja e. jne.v. sünkroniseeritud objektid. Sünkroonmasin peab olema ühendatud jaamabussidega e vektorite gaasimaski asendi ajal. jne. lk ja siini pinged.
Joonisel fig. 4 on kujutatud elektromagnetilise faasimõõturi ühendusskeem ja elektromagnetilise sünkroskoobi ühendusskeem.