Alalisvoolumootorite seadistamine
 Alalisvooluelektrimootorite reguleerimine toimub järgmises mahus: välisuuring, mähiste alalisvoolu takistuste mõõtmine, mähiste isolatsioonitakistuste mõõtmine korpuse ja nende vahel, mähiste vaheisolatsiooni katsetamine. armatuuri mähis, proovisõit.
Alalisvooluelektrimootorite reguleerimine toimub järgmises mahus: välisuuring, mähiste alalisvoolu takistuste mõõtmine, mähiste isolatsioonitakistuste mõõtmine korpuse ja nende vahel, mähiste vaheisolatsiooni katsetamine. armatuuri mähis, proovisõit.
Alalisvoolumootori väline kontroll, nagu ka asünkroonmootori kontroll, algab varjestusega. Alalisvoolumootori tüübisildile peavad olema märgitud järgmised andmed:
- tootja nimi või kaubamärk,
- auto tüüp,
- masina seerianumber,
- nimiandmed (võimsus, pinge, vool, kiirus),
- viis masinat erutada,
- väljaandmise aasta,
- masina kaal ja GOST.
Mähised klemmid püsimootor peavad olema üksteisest ja korpusest usaldusväärselt isoleeritud, nende ja kere vaheline kaugus peab olema vähemalt 12-15 mm. Välise läbivaatuse ajal pööratakse erilist tähelepanu koguja ja harjade mehhanism (harjad, traversid ja harjahoidjad), kuna nende seisund mõjutab oluliselt masina kommutatsiooni ja seega ka selle töö stabiilsust.
Kollektorit kontrollides ollakse veendunud, et tööpinnal ei ole jälgi freesidest, aukudest, laki- ja värvilaikudest ning harjamehhanismi ebarahuldavast tööst tekkinud süsiniku ladestumise jälgi. Kollektorplaatide vaheline isolatsioon tuleks valida 1–2 mm sügavusele, plaatide servad 0,5–1 mm laiusega faasitud (olenevalt mootori võimsusest). Plaatide vahed peavad olema täiesti puhtad — need ei tohi sisaldada metalli- ega puidulaaste, grafiitharjade tolmu, õli, lakki jms.
Alalisvoolumootori ja eriti selle harjamehhanismi tööd mõjutavad kollektori leke ja selle vibratsioon. Mida suurem on kollektori perifeerne kiirus, seda väiksem on lubatud leke. Kiirete mootorite puhul ei tohiks maksimaalne lubatud lekkeväärtus ületada 0,02-0,025 mm. Vibratsiooni amplituudi suurust mõõdetakse näidiku abil.
Mõõtmise ajal surutakse indikaatori ots vastu pinda suunas, milles vibratsiooni mõõdetakse. Kuna kollektori pind on katkendlik (kollektoriplaadid ja süvendid vahelduvad), kasutatakse hästi teritatud harja, millele indikaatori ots peaks toetuma. Indikaatori korpus tuleb kinnitada vibratsioonivabale alusele.
Mõõtmisel võngub indikaatori osuti mõõdetud vibratsiooni sagedusega teatud nurga piires, mille väärtust hinnatakse indikaatori skaalal millimeetri sajandikkudes. Kuid see seade suudab mõõta vibratsiooni kiirustel kuni 750 pööret minutis.Mootorite puhul, mille pöörlemiskiirus on üle 750 p/min, on vaja kasutada spetsiaalseid seadmeid – vibromeetreid või vibrograafe, millega saab mõõta või salvestada masina teatud komponentide vibratsiooni.
Leket mõõdetakse ka indikaatoriga. Kollektori leket mõõdetakse nii külma kui kuuma mootori tingimustes. Mõõtmisel pöörake tähelepanu indikaatori noole käitumisele. Noole sujuv liikumine näitab pinna piisavat silindrilisust ja noole tõmblemine pinna silindrilisuse lokaalseid rikkumisi, mis on eriti ohtlik mootori harjamehhanismile Löökide mõõtmine on tingimuslik, kuna töö kogemus näitab, et on mootoreid, mille löökide väärtused on madalatel pöörlemiskiirustel ja nimikiirusel suured, töötavad rahuldavalt. Seetõttu saab lõpliku järelduse kollektori töö kvaliteedi kohta anda alles pärast mootori koormuse all töötamise kontrollimist.
Alalisvoolumootori mehaanilise osa kontrollimisel peaksite pöörama tähelepanu mähiste, laagrisõlmede vahekordade ja ühenduste seisukorrale, pilu tasasusele (koos lahtivõetud mootoriga). Armatuuri ja mootori põhipooluste diametraalselt vastassuunas mõõdetud erinevus ei tohi erineda keskmisest väärtusest rohkem kui 10% vahede puhul, mis on väiksemad kui 3 mm, ja mitte rohkem kui 5% vahede puhul, mis on suuremad kui 3 mm
Pärast löökide ja vibratsiooni kontrollimist hakkavad nad reguleerima mootori harja mehhanismi. Klambrites olevad harjad peaksid vabalt liikuma, kuid ei tohiks kõikuda.Tavaline vahe harja ja hoidiku vahel pöörlemissuunas ei tohiks ületada 0,1-0,4 mm, pikisuunas 0,2-0,5 mm.
Harjade normaalne erirõhk kollektorile, olenevalt harja materjali kvaliteedist, peaks olema grafiitharjade puhul vähemalt 150-180 g/cm2, vaskgrafiidi puhul 220-250 g/cm2. Voolu ebaühtlase jaotuse vältimiseks ei tohiks üksikute harjade rõhk keskmisest erineda rohkem kui 10%. Spetsiifiline rõhk määratakse järgmiselt. Kollektori ja harja vahele asetatakse õhuke paberileht, harja külge kinnitatakse dünamomeeter ja seejärel dünamomeetriga pintslit tõmmates leiavad nad positsiooni, kust saab paberilehte vabalt tõmmata. Düno näit sellel hetkel vastab harja survele kollektorile. Erirõhk määratakse dünamomeetri näidu jagamisel harja aluse pindalaga.
Harjade õige paigaldamine on masina korrektse töötamise üks olulisemaid tegureid. Harjahoidjad on paigaldatud nii, et harjad on rangelt paralleelsed kollektorplaatidega ja nende servade vaheline kaugus on võrdne masina pooluste kaugusega, mille viga ei ületa 2%.
Mitme liipriga mootorites on harjahoidjad paigutatud nii, et harjad katavad võimalikult suure osa kollektori pikkusest (nn. virnastatud paigutus). See võimaldab kommuteerimisel osaleda kogu kollektori pikkuses, mis aitab kaasa selle ühtlasemale kulumisele.Kuid sellise harjade paigutuse korral on vaja tagada, et harjad ei ulatuks töö ajal (võlli käiku arvesse võttes) kollektori servast kaugemale. Enne mootori käivitamist hõõrutakse harjad ettevaatlikult vastu kollektorit (joonis 1) keskmise karedusega klaaspaberiga (kuid mitte karborundiga). Karborundi paberiterad võivad tungida läbi harja korpuse ja seejärel töö ajal kollektorit kriimustada, halvendades sellega masina lülitustingimusi.
Enne mähiste lisamise õigsuse kontrollimist uurige teatud tüüpi masina klemmide märgistust. Alalisvoolumootorites tähistatakse mähised vastavalt standardile GOST 183-66 nende nime esimeste suurtähtedega, millele järgneb number 1 mähise alguse ja 2 selle lõpu jaoks. Kui mootoris on teisi samanimelisi mähiseid, on nende algused ja lõpud tähistatud numbritega 3-4, 5-6 jne. Klemmide märgised võivad vastata ergutusahelatele ja mootori pöörlemissuundadele, mis on näidatud joonisel fig. 2.
Pooluste mähiste kaasamise õigsust kontrollitakse, et selgitada nende polaarsuse vaheldumist. Iga masina abi- ja põhipooluste polaarsuse vaheldumine peab olema masina antud pöörlemissuuna jaoks rangelt määratletud. Mootorrežiimil töötava masina pöörlemissuunas pooluselt poolusele liikumisel on iga põhipooluse järel sama polaarsusega lisapoolus, näiteks N — n, S — s. Pooluste polaarsust saab määrata mitmel viisil: visuaalse kontrolli, magnetnõela ja spetsiaalse mähise abil.
Esimest meetodit kasutatakse juhtudel, kui mähiste mähise suunda saab visuaalselt jälgida.

Riis. 1. Harjade hõõrumine kollektorile:. a — vale; särav
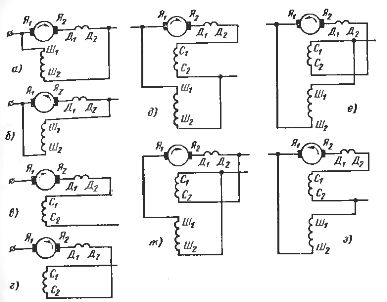
Riis. 2. Alalisvoolumootorite mähisklemmide tähistused erinevate ergutusskeemide ja pöörlemissuundade jaoks
Teades mähise suunda ja kasutades "gimbal" reeglit, määrake pooluste polaarsus. See meetod on mugav jadaväljamähisest pärit mähiste jaoks, mille mähise suunda on keerdude olulise ristlõike tõttu väga lihtne määrata.
Teist meetodit kasutatakse peamiselt paralleelsete ergutusmähistega poolide puhul. Selle meetodi olemus on järgmine. Mootori mähisele suunatakse vool, magnetnõel riputatakse keermele, mille otste polaarsus on märgitud, ja rakendatakse vaheldumisi igale poolusele. Sõltuvalt pooluse polaarsusest on nool selle poole suunatud vastupidise polaarsusega.
Selle meetodi kasutamisel tuleb meeles pidada, et noolel on võime uuesti võluda, seetõttu tuleks katse läbi viia nii kiiresti kui võimalik. Magnetnõela meetodit kasutatakse jadapooli polaarsuse määramiseks harva, kuna piisavalt tugeva välja tekitamiseks peab mähist läbima märkimisväärne vool.
Kolmas poolide polaarsuse määramise meetod on rakendatav iga mähise puhul, seda nimetatakse testmähise meetodiks. Mähis võib olla mis tahes kujuga - toroidaalne, ristkülikukujuline, silindriline. Mähis on keritud võimalikult paljude keerdudega õhukesest isoleeritud vasktraadist papist, tselluloidist vms raamile. Millivoltmeeter.
Mähiste ühendamine loetakse õigeks, kui iga kahe kõrvuti asetseva pooluse all kalduvad seadme nooled eri suundadesse, eeldusel, et testmähis on suunatud samal küljel asuvate pooluste poole. Täiendavate pooluste mähise õiget ühendust armatuurimähise suhtes kontrollitakse vastavalt joonisel fig. 4.
Kui lüliti K on suletud, kaldub millivoltmeetri nõel kõrvale. Õige sisselülitamise korral on abipooluse mähise magnetiseerimisjõud suunatud armatuuri mähise magnetiseerimisjõule vastupidiselt, seetõttu peavad armatuurimähis ja abipooluse mähis olema sisse lülitatud vastupidiselt, st miinus (või pluss) armatuur tuleb ühendada lisapostide mähise miinus (või pluss) külge.
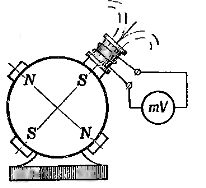
Riis. 3. Alalisvoolumootorite pooluste polaarsuse määramine testmähise abil
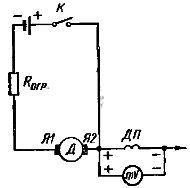
Riis. 4. Skeem täiendavate pooluste mähise kaasamise õigsuse kontrollimiseks ankru mähise suhtes
Lisapostide mähise ja kompensatsioonimähise vastastikuse ühenduse kontrollimiseks võite kasutada joonisel fig. 5, väikeste mootorite jaoks.
Alalisvoolumootori normaalse töö korral peab kompensatsioonimähise tekitatud magnetvoog vastama komplementaarse pooluse pooli magnetvoo suunale. Peale mähiste polaarsuse määramist tuleb kompensatsioonimähis ja lisapooluste mähis omavahel ühendada ehk siis ühe mähise miinus ühendada teise plussiga.
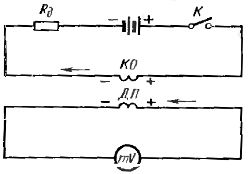
Riis. 5.Skeem kompensatsioonimähisele täiendavate postide mähise lisamise õigsuse kontrollimiseks
Enne harjade polaarsuse määramist ja mähiste takistuste vajalike mõõtmiste tegemist seadke harjad neutraalasendisse. Elektrimootori null tähendab sellist põhipooluste mähiste ja armatuuri vastastikust paigutust, kui nendevaheline teisendustegur on null. Harjade neutraalasendisse seadmiseks on kokku pandud kett (joonis 6).
Ergastusmähis on lüliti kaudu ühendatud toiteallikaga (akuga) ja armatuuriharjadega on ühendatud tundlik millivoltmeeter.Kui ergutusmähisesse suunatakse jõnksuga vool, kaldub millivoltmeetri nõel ühes suunas. või mõni muu. Kui harjad on rangelt neutraalses asendis, ei kaldu seadme nõel kõrvale.
Tavaliste instrumentide täpsus on madal — parimal juhul 0,5%. Seetõttu on harjad seatud asendisse, mis vastab seadme minimaalsele näidule ja seda peetakse neutraalseks. Neutraalsete harjade reguleerimise raskus seisneb selles, et neutraali asend sõltub kollektoriplaatide asendist.
Tihti juhtub, et ühe armatuuriasendi jaoks leitud neutraal on pööramisel nihkunud. Seetõttu on neutraalasend määratletud kahe erineva võlli asendi jaoks. Kui neutraali asend osutub armatuuri erinevate asendite puhul erinevaks, siis tuleks harjad asetada kahe märgi vahele. Harjade neutraalasendisse seadmise täpsus sõltub harja pinna kleepumisastmest kollektoriga.Seetõttu hõõrutakse mootori neutraali määramisel täpsema tulemuse saamiseks harjad eelnevalt kollektorisse.
Pintslite polaarsus määratakse ühel järgmistest viisidest.
1. Voltmeeter on ühendatud kahe punktiga kollektoril (joonis 7), mis asuvad vastasharjadest samal kaugusel. Erutudes kaldub voltmeetri nõel ühes või teises suunas kõrvale. Kui nool kaldub paremale, siis "pluss" on punktis 1 ja "miinus" on punktis 2. Lähim harja pöörlemissuuna vastas on seadme ühendatud klambri polaarsusega.
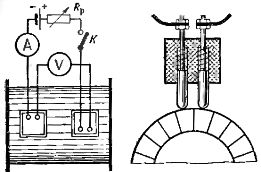
2. Ergastuspoolist juhitakse läbi teatud polaarsusega alalisvool, armatuuri külge ühendatakse voltmeeter ja armatuur viiakse käsitsi vajutades või mehhanismi abil pöörlema. Sel juhul kaldub voltmeetri nõel kõrvale. Noole suund näitab harjade polaarsust.
Alalisvoolumootori mähiste takistuse mõõtmine on alalisvoolumootorite kontrollimisel väga oluline element, kuna mõõtmiste tulemuste põhjal hinnatakse mähiste kontaktühenduste seisukorda (ratsioonid, poldid, keevisliited). Mootori mähiste takistust mõõdetakse ühega järgmistest meetoditest: ampermeeter - voltmeeter, ühe- või topeltsild ja mikrooommeeter.
On vaja meeles pidada mõningaid alalisvoolumootorite mähiste takistuse mõõtmise omadusi.
1. Välja jadamähise, kompensatsioonimähise, lisapooluste mähise takistus on väike (tuhandik oomi), seetõttu tehakse mõõtmised mikrooommeetri või topeltsillaga.
2.Armatuuri mähise takistust mõõdetakse ampermeeter-voltmeeter meetodil, kasutades spetsiaalset kahekontaktilist sondi, mille vedrud on isoleerivas käepidemes (joonis 8). Mõõtmine toimub järgmiselt: hästi laetud aku pingega 4-6 V alalisvool juhitakse eemaldatud harjadega statsionaarse armatuuri kollektorplaatidele Plaatide vahele, millele vool antakse, pingelangust mõõdetakse millivoltmeetriga. Armatuuri ühe haru nõutav takistuse väärtus
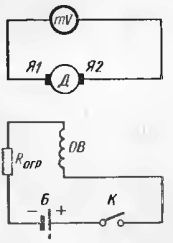
Riis. 6. Skeem harjade õige paigaldamise kontrollimiseks neutraalasendis
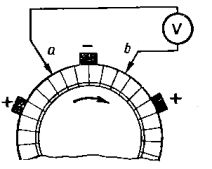
Riis. 7. Pintslite polaarsuse määramise skeem
Riis. 8 Armatuuri takistuse mõõtmine kahe kontaktiga sondiga
Sarnased mõõtmised tehakse ka kõigi teiste plaatide puhul. Iga külgneva plaadi vahelised takistused ei tohiks üksteisest erineda rohkem kui 10% nimiväärtusest (kui masinal on tasandusmähis, võib erinevus ulatuda 30%).
Mähiste isolatsioonitakistuse mõõtmine ja mähiste isolatsiooni dielektrilise tugevuse kontroll toimub samamoodi nagu asünkroonmootorite vastavad kontrollpunktid.
Alalisvoolumootori esmane käivitamine toimub kohe pärast mootori häälestamist, et lõplikult kontrollida selle töövõimet.. Sarnaselt asünkroonmootoritele testitakse alalisvoolumootoreid tühikäigul, mehhanismi ja käigukastiga välja lülitatud. Juhtahela õigeks häälestamiseks on vajalik alalisvoolumootori sarnane tühikäigukatse.
Mootori käivitamine tühikäigul ja koormuse all tuleks teha väga ettevaatlikult.Vahetult enne käivitamist on vaja veenduda, et armatuur pöörleb kergelt, armatuur ei puuduta staatorit, kas laagrites on määre, samuti tuleb kontrollida kaitsereleed. Maksimaalse kaitse väljalülitusvool ei tohi ületada 200% mootori maksimaalsest voolust. Testiga Alalisvoolumootori käivitamine juhtida kommutatsiooni kvaliteeti, jälgides kollektorit voolu suurenemise ajal ja seejärel, kui mootor töötab tühikäigul maksimaalse pinge ja maksimaalse kiirusega.
Koormus ei tohiks põhjustada sädemete sageduse suurenemist võrreldes tühikäiguga. Lubatud on kasutada alalisvoolumootorit, mille harja sädemeaste on 11/2 ja isegi 2. Olulisema sädemetaseme korral reguleeritakse kommutatsiooni: harjad on seatud neutraalasendisse, lisapooluste mähis on õigesti sisse lülitatud, surutakse harjad kollektori külge ja harjad kleepuvad kollektori külge.
Tuleb meeles pidada, et vastuvõetamatu kaare teke kollektoril võib olla seotud juhtahela talitlushäiretega, kuna armatuuri ja ergutusahelate voolu muutumise kiirus, voolu tõusude maksimumväärtused, armatuuri vool ja masina magnetvoog erinevatel aegadel sõltuvad vooluringist. Pärast koormuse all töötamise jälgimist ja alalisvoolumootori kommutatsiooni reguleerimist võib kasutuselevõtu protsessi lugeda lõppenuks.