Tagurdage ja peatage oravapuuriga asünkroonmootor
Asünkroonmootor on pööratav masin. Rootori pöörlemissuuna muutmiseks on vaja muuta magnetvälja pöörlemissuunda (lülitades toitejuhtmed mootori kahe faasi klemmidele) — Mootori käivitus- ja pidurdusahelad
Kahe pöörlemissuuna mehaanilised omadused on näidatud joonisel fig. 1.
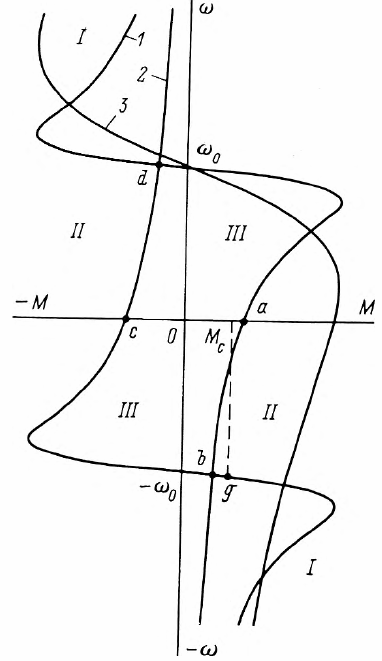
Riis. 1. Asünkroonmootori mehaaniliste karakteristikute perekond seiskamisrežiimis pöörduval tööl võrgu energiavarustusega (I), opositsioonirežiim (II) ja mootoriga (III) 1, 2 – loomulik; 3 — kunstlik.
Oravapuuriga asünkroonmootorit saab kasutada mitte ainult mootorina, vaid ka pidurina. Stopprežiimis töötab iga elektrimootor alati generaatorina. Sellisel juhul võib oravpuurirootoriga asünkroonelektrimootoril olla kolm pidurdusrežiimi.
Regeneratiivpidurduse režiimis töötab masin negatiivse libisemisega. Sel juhul ületab rootori kiirus magnetvälja pöörlemiskiirust.Sellele režiimile lülitumiseks tuleb loomulikult rakendada võlli küljele väline aktiivne moment.
Tagasisiderežiimi kasutatakse laialdaselt tõsteseadmetes. Laskumise ajal võib tõukejõusüsteem koormuse potentsiaalse energia tõttu omandada magnetvälja pöörlemiskiirust ületava kiiruse ja laskumine toimub tasakaaluolekus, mis vastab mehaanilise karakteristiku teatud punktile g. , kui langeva koormuse tekitatud staatilist momenti tasakaalustab mootori pidurdusmoment.
Reaktiivse staatilise pöördemomendiga tavalistes ajamites rakendatakse kõnealust režiimi ainult spetsiaalsete juhtimisahelate abil, mis võimaldavad vähendada magnetvälja pöörlemiskiirust. Tagasisiderežiimi induktsioonmasina mehaanilised omadused on näidatud samal joonisel. 1.
Nagu näidatud, on generaatorirežiimi maksimaalne pöördemoment veidi suurem kui mootorirežiimis ja absoluutväärtuse kriitiline libisemine on sama.
Asünkroonsed generaatorid kui sellised on väga kitsa ulatusega, nimelt tuuleelektrijaamad... Kuna tuule jõud ei ole konstantne ja vastavalt sellele muutub seadme pöörlemiskiirus oluliselt, on nendel tingimustel eelistatav asünkroonne generaator.
Kõige laialdasemalt kasutatav on pidurdusrežiim — opositsioon. Asünkroonmootorite ja ka alalisvoolumootorite sellele režiimile üleminek on võimalik kahel juhul (joonis 1): staatilise pöördemomendi olulise suurenemisega (jaotis ab) või staatori mähise lülitamisel erinevale pöörlemissuunale ( jagu cd).
Mõlemal juhul töötab mootor libisemisega, mis on suurem kui 1, kuni voolud ületavad käivitusvoolu. Seetõttu saab oravapuurmootori puhul seda režiimi kasutada ainult ajami kiireks peatamiseks.
Nullkiiruse saavutamisel tuleb mootor vooluvõrgust lahti ühendada, muidu kipub see vastupidises suunas kiirendama.
Kui pidurdatakse vastassuunalise keritud rootoriga mootoritega, tuleb rootori vooluringi sisse viia reostaadi takistus, et piirata voolu ja suurendada pidurdusmomenti.
See on ka võimalik dünaamiline pidurdusrežiim… See tekitab aga mõningaid raskusi. Kui mootor vooluvõrgust lahti ühendada, kaob ka masina magnetväli. Induktsioonmasinat on võimalik ergutada alalisvooluallikast, mis on ühendatud vahelduvvooluvõrgust lahti ühendatud staatoriga. Allikas peaks andma staatorimähises nimiväärtusele lähedase voolu. Kuna seda voolu piirab ainult pooli elektritakistus, peab alalisvooluallika pinge olema madal (tavaliselt 10–12 V).
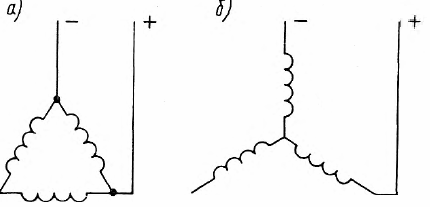
Riis. 2. Asünkroonmootori staatori ühendamine alalisvooluallikaga dünaamilises pidurdusrežiimis, kui see on ühendatud kolmnurga (a) ja tärniga (b)
Iseergutust kasutatakse ka dünaamilisel pidurdamisel. Kondensaatorid on ühendatud staatoriga, mis on vooluvõrgust lahti ühendatud.
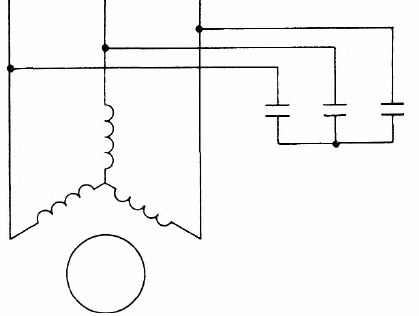
Riis. 3. Iseergastava asünkroonmootori dünaamilise pidurdamise skeem
Rootori pöörlemisel tekib staatori vooluringis EMF jääkmagnetiseerimise ja staatori mähiste ning ka kondensaatorite kaudu voolava voolu tõttu.Kui staatori ahelas saavutatakse teatud kiirus, tekivad resonantstingimused: induktiivsete takistuste summa võrdub mahtuvusliku takistusega. Algab intensiivne masina iseergastumisprotsess, mis viib EMF-i suurenemiseni. Iseergutusrežiim lõpeb, kui masina E EMF ja kondensaatorite pingelang on võrdsed.
Maksimaalne pidurdusmoment koos võimsuse suurenemisega lülitub väiksematele kiirustele. Vaadeldava pidurdusrežiimi puudused on pidurdustegevuse ilmnemine ainult teatud kiirustsoonis ja vajadus kasutada väikesel kiirusel pidurdamiseks suuri kondensaatoreid.
Positiivne on see, et täiendavat elektriallikat pole vaja. Seda režiimi rakendatakse alati seadmetes, kus toitevõrgu võimsusteguri parandamiseks on mootoriga ühendatud kondensaatoripank.
Vaata ka sellel teemal: Asünkroonsete mootorite piduriahelad