Asünkroonse mootori sageduse reguleerimine
Praegu kasutatakse laialdaselt asünkroonmootoriga elektriajami pöörlemisnurkkiiruse sagedusjuhtimist, kuna see võimaldab laias vahemikus sujuvalt muuta rootori pöörlemiskiirust nii nimiväärtusest kõrgemal kui ka allapoole.
Sagedusmuundurid on kaasaegsed kõrgtehnoloogilised laia reguleerimisvahemikuga seadmed, millel on lai valik funktsioone asünkroonmootorite juhtimiseks. Kõrgeim kvaliteet ja töökindlus võimaldavad neid kasutada erinevates tööstusharudes pumpade, ventilaatorite, konveierite jms ajamite juhtimiseks.

Toitepinge sagedusmuundurid jagunevad ühefaasilisteks ja kolmefaasilisteks, konstruktsiooni järgi aga pöörlevateks ja staatilisteks elektrimasinateks. Elektrimasinamuundurites saadakse muutuv sagedus tavaliste või spetsiaalsete elektrimasinate abil. V staatilised sagedusmuundurid toitevoolu sageduse muutus saavutatakse elektriliste elementide kasutamisega, millel puudub liikumine.
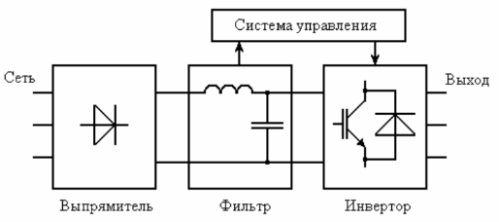
Asünkroonmootori sagedusmuunduri ahel
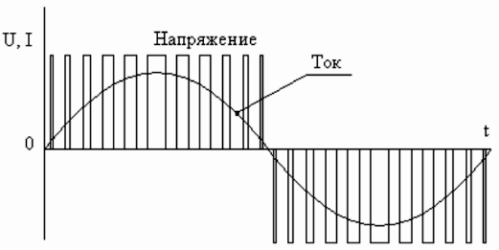
Sagedusmuunduri väljundsignaal
Ühefaasilise võrgu sagedusmuundurid võivad pakkuda kuni 7,5 kW võimsusega tootmisseadmete elektriajamit. Kaasaegsete ühefaasiliste muundurite konstruktsiooni eripäraks on see, et sisendis on üks faas pingega 220 V ja väljundis kolm sama pingeväärtusega faasi, mis võimaldab ühendada kolmefaasilised elektrimootorid seadet kondensaatoreid kasutamata.
380 V kolmefaasilise võrgu toitel töötavad sagedusmuundurid on saadaval võimsusvahemikus 0,75 kuni 630 kW. Sõltuvalt võimsuse väärtusest toodetakse seadmeid kombineeritud polümeer- ja metallkorpuses.
Asünkroonmootorite kõige populaarsem juhtimisstrateegia on vektorjuhtimine. Praegu rakendab enamik sagedusmuundureid vektorjuhtimist või isegi anduriteta vektorjuhtimist (seda tendentsi esineb sagedusmuundurites, mis algselt rakendavad skalaarjuhtimist ja millel puuduvad klemmid kiirusanduri ühendamiseks).
Sõltuvalt väljundkoormuse tüübist jaotatakse sagedusmuundurid vastavalt teostustüübile:
-
pumba- ja ventilaatoriajamite jaoks;
-
üldiseks tööstuslikuks elektriajamiks;
-
töötab ülekoormusega töötavate elektrimootorite osana.

Tüüpiliste koormuste mehaanilised omadused
Kaasaegsetel sagedusmuunduritel on mitmekesine funktsionaalsete omaduste komplekt, näiteks on neil mootori kiiruse ja pöörlemissuuna käsitsi ja automaatne juhtimine, samuti sisseehitatud potentsiomeeter juhtpaneelil.Kingitud võimalus reguleerida väljundsagedusvahemikku 0 kuni 800 Hz.
Konverterid suudavad automaatselt juhtida asünkroonset mootorit vastavalt perifeersete andurite signaalidele ja juhtida elektriajamit vastavalt etteantud ajastusalgoritmile. Toetage automaatseid taastamisfunktsioone lühiajalise voolukatkestuse korral. Teostage siirdejuhtimist kaugkonsoolilt ja kaitske elektrimootoreid ülekoormuse eest.

Pöörlemise nurkkiiruse ja toitevoolu sageduse vaheline seos tuleneb võrrandist
ωo = 2πe1/ p
Pideva toitepinge U1 ja sageduse muutumise korral muutub asünkroonmootori magnetvoog. Samal ajal on magnetsüsteemi paremaks kasutamiseks toiteallika sageduse vähenemisel vaja pinget proportsionaalselt vähendada, vastasel juhul suurenevad terase magnetiseerimisvool ja kaod oluliselt.
Samamoodi peab toitesageduse kasvades pinge proportsionaalselt kasvama, et hoida magnetvoo konstantsena, sest vastasel juhul (võlli konstantse pöördemomendi juures) põhjustab see rootori voolu suurenemist, selle mähiste vooluga ülekoormust ja maksimaalse pöördemomendi vähenemist.
Ratsionaalne pingeregulatsiooni seadus sõltub takistusmomendi iseloomust.
Staatilise koormuse konstantsel hetkel (Ms = const) tuleb pinget reguleerida võrdeliselt selle sagedusega U1 / f1 = const. Ventilaatori koormuse iseloomu jaoks on suhe kujul U1 / f21 = konst.
Koormusmomendiga pöördvõrdeline kiirusega U1 /√f1 = konst.
Allolevatel joonistel on näidatud nurkkiiruse sageduse reguleerimisega asünkroonmootori lihtsustatud ühendusskeem ja mehaanilised omadused.
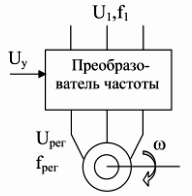
Sagedusmuunduri ühendusskeem asünkroonmootoriga
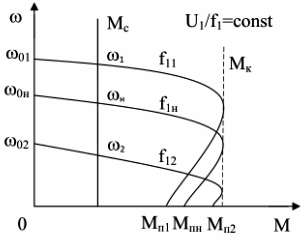
Konstantse staatilise takistusmomendiga koormuse karakteristikud
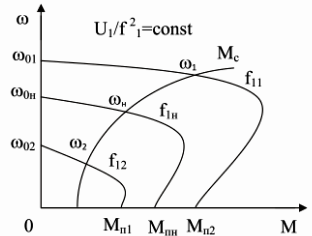
NSF-funktsioonid ventilaatori laadimiseks
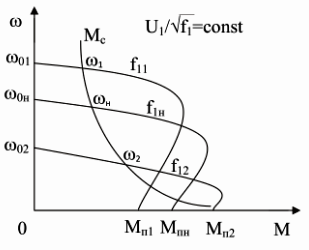
Karakteristikud staatilise koormuse pöördemomendi korral, mis on pöördvõrdeline pöörlemise nurkkiirusega
Asünkroonmootori kiiruse sageduse reguleerimine võimaldab muuta pöörlemisnurka vahemikus — 20 … 30 kuni 1. Asünkroonmootori kiiruse reguleerimine peamisest allapoole toimub praktiliselt nullini.
Toitevõrgu sageduse muutumisel sõltub asünkroonmootori pöörlemiskiiruse ülempiir selle mehaanilistest omadustest, eriti kuna sagedustel, mis ületavad nominaalset asünkroonmootorit, töötab paremate energiaomadustega kui madalamatel sagedustel. Seega, kui ajamisüsteemis kasutatakse käigukasti, tuleb seda mootori sagedust reguleerida mitte ainult alla, vaid ka nimipunktist ülespoole kuni maksimaalse lubatud pöörlemiskiiruseni mehaanilise tugevuse tingimustes. rootor.
Kui mootori pöörlemissagedus tõuseb üle passis märgitud väärtuse, ei tohiks toiteallika sagedus ületada nimiväärtust rohkem kui 1,5–2 korda.
Sagedusmeetod on kõige lootustandvam oravapuuriga rootori asünkroonmootori reguleerimiseks. Sellise reguleerimise korral on võimsuskaod väikesed, kuna nendega ei kaasne sissevoolu suurenemist libisemine… Saadud mehaanilised omadused on väga jäigad.