Asünkroonse elektrimootori valimine dünaamilise pidurdamise režiimis töötamiseks iseergastusega
 Keritud rootoriga asünkroonne elektrimootor lihtsaima juhtimisskeemiga — takistuse kaasamine rootori ahelasse on äärmiselt madalate juhtimisomadustega. Seetõttu töötati enne sagedusmuundurite turule jõudmist välja erinevaid skeeme, et vähendada kiirust astmelises režiimis.
Keritud rootoriga asünkroonne elektrimootor lihtsaima juhtimisskeemiga — takistuse kaasamine rootori ahelasse on äärmiselt madalate juhtimisomadustega. Seetõttu töötati enne sagedusmuundurite turule jõudmist välja erinevaid skeeme, et vähendada kiirust astmelises režiimis.
Tegelikult pole neid nii palju. Välismaal sai laialt levinud täiendava elektrimasina – peamootoriga samale võllile paigaldatud keerispiduri – kasutamine. Skeem võimaldab koormuse langetamisel saada piisavalt jäigad mehaanilised omadused, kuid sellisel elektriajamil on ülimadalad energiaomadused (keerispiduris vabaneb pidurdusenergia). Lisaks on keerisepiduril üsna kõrge hind ja see raskendab oluliselt mehaanilise osa paigutust.
Seetõttu, et saada 1970. aastate lõpus Dünamo tehases faasirootoriga asünkroonmootoril põhinevates tõstemehhanismides maandumiskiirus, koostas projekteerimismeeskond E.M. Pevzner tutvustas iseergastavat dünaamilist pidurdamist.
Sellist elektriajamit kasutatakse laialdaselt kodumaistes kraanades (TSD, TSDI, KSDB tüüpi paneelid sild-, pukk- ja pukk-kraanade jaoks, tornkraanade KB-309, KB-403, KB-404, KB-405, KB - juhtpaneelid - 406, KB-408, KB-415, KB-415-07, KB-473, KBM-401P.). Seega räägime kümnetest tuhandetest töötavatest kraanadest.
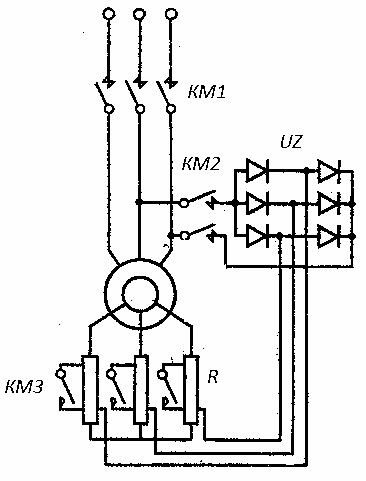
Riis. 1. Asünkroonse mootori lülitamise skeem dünaamilisele pidurdusrežiimile iseergastusega
Iseergastusega dünaamilise pidurdamise põhimõte on järgmine:
Rootori ahel sisaldab kolmefaasiline alaldi UZ (joonis 1). Elektrimootor ühendatakse võrgust lahti kontaktori KM1 kaudu. Alaldatud pinge ühendatakse kontaktori KM2 kaudu staatori mähisega. Kontaktori kontaktid KM3 on suletud. Kui pidur vabastatakse (pole joonisel näidatud), hakkab mootori võll langeva raskuse toimel pöörlema.
Rootori mähises indutseeritakse EMF, mille mõjul hakkab rootori-staatori ahelas voolama vool. Mootor arendab pidurdusmomenti, koormust langetatakse konstantsel kiirusel. Kiiruse väärtus määratakse rootori ahela takistuse väärtuse järgi. Mida suurem on takistus, seda kiirem on laskumine. Kiiruse suurendamiseks lülitatakse kontaktor KM3 välja.
Iseergastuv dünaamilise pidurdusrežiimi korral tarbib elektriajam võrgust voolu ainult pidurihüdraulilise tõukuri ja relee-kontaktori seadmete toiteks. Näiteks joonis fig. 7 on näidatud TSD-paneeliga elektriajami mehaanilised omadused.
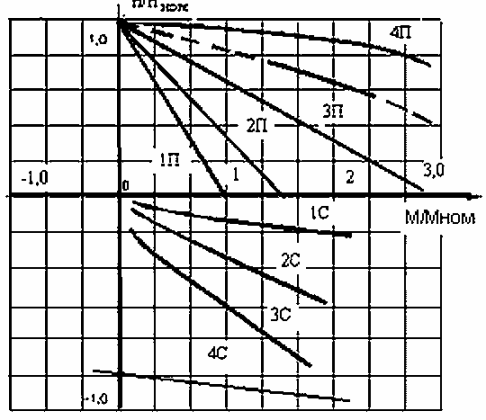
Riis. 2. TSD-paneeliga tõstemehhanismi elektriajami mehaanilised omadused
Dünaamilised pidurdusomadused on tähistatud kui 1C, 2C, 3C. On näha, et omadused on piisavalt kõvad. Kiiruse reguleerimine toimub vahemikus 1: 8, mis enamikul juhtudel on massisegistite jaoks piisav.
Elektrimootori iseergastuse tingimus on:
kus x '2 – rootori mähise induktiivne takistus, oomi; хо- magnetiseerimisahela induktiivne takistus. Om
Kus ks — skeemi koefitsient
kd — rootori voolu staatori voolu vähendamise koefitsient; kcx — parandusahela koefitsient, kolmefaasilise sillaahela puhul kx = 0,85; kt on mootori teisendustegur staatorilt rootorile
Koefitsient kd sõltub staatorimähiste ühendusskeemist, mis on kodumajapidamises kasutatavates kraanimootorites 380 V võrgupingel tähega ühendatud.
Koefitsient kt sõltub teisenduskoefitsiendist, s.o. staatori pinge ja rootori pinge suhe, mis sõltub mootori tüübist. Näiteks mitme MT ja 4MT seeria elektrimootori puhul on väärtus ja seotud parameetrid tabelina toodud. 1.
Tabel 1.
Elektrimootori tüüp võimsus, kWt Rootori pinge, V kt x x '2 xho √(1 + 2x '2/ho) MTN412-6 30 255 1,5 1,3 0,173 3,74 1,04 4MTN225L6 55 290 .3 .10710 .310710 . 12-6 55 340 1,11 0,98 0,197 3,8 1,05 4MTN280L10 75 308 1,23 1,06 0,146 2,33 1,06 4MTN280M6 110 420 0,9 0,7 0,083 2,281
Tingimus кс ≥ √(1 + 2х '2/хо) viiakse läbi MTN412-6, 4MTN225L6 tüüpi mootorite puhul, mida võib nimetada "ergastatud". Sellised elektrimootorid lähevad iseergutusrežiimi ilma täiendavaid vooluringi otsuseid tegemata. Madalpinge komplektsetes seadmetes (madalpinge lülitusaparaadid või juhtpaneelid), mis on kavandatud selliste mootoritega koos töötama, on aga töökindlaks tööks ette nähtud väike algergutus.
Esialgne ergutus viiakse läbi konstanti, nn Poollaine alaldi "toitevoolu" väike väärtus (tavaliselt mitte rohkem kui 10% mootori nimivoolust). Ergastatud mootorite puhul piisab sellest igal juhul usaldusväärseks üleminekuks iseergastavale dünaamilisele pidurdusrežiimile.
Elektrimootorid MTN512-6, 4MTN280M6, mille tingimus кс ≥ √(1 + 2х '2/хо) ei ole täidetud, on "erutumata". See ei tähenda, et sellised mootorid ei saaks töötada iseergastusega dünaamilises pidurdusrežiimis, kuid nende jaoks vajaliku lisavoolu väärtus ulatub 50%-ni staatori nimivoolust.See nõuab spetsiaalsete NKU (juhtpaneelide) kasutamist ergastamata elektrimootorite jaoks. …
Elektrimootori tüüp 4MTN280L10, mille кс = √(1 + 2х '2/хо) on iseergastuse piiril ja igasugune juhuslik parameetrite muutus võib rikkuda iseergastuse tingimust. Seetõttu võib sellist mootorit liigitada ka mitteergastavaks.
Peamised parameetrid, mis mõjutavad elektrimootori iseergastumisvõimet, on rootori nimipinge E2nom. E2nom kriitiliseks väärtuseks, mille juures iseergastust ilma suure toitevooluta ei toimu, tuleks võtta 300 V.
Seda iseergastava dünaamilise pidurdusrežiimi omadust võtsid Dynamo tehas ja Sibelektromotor PO arvesse 1980. aastate alguses 4MT kraana elektrimootorite seeria väljatöötamisel.
Eelkõige on mõne elektrimootori E2nom väärtust vähendatud võrreldes eelmise MT-seeriaga, et muuta mootoreid erutavaks.
Näiteks tornkraanade elektriajamis laialdaselt kasutatava elektrimootori 4MTN225L6 puhul vähendati E2nom võrreldes eelmise MTN512-6 seeria mootoriga 340-lt 290 V-le, mis pani mootori ise ergastama. Hiljem alustas OJSC "Sibelectromotor" samade parameetritega elektrimootori 4MTM225L6 tootmist.
Aja jooksul hakkasid sarnase otstarbega elektrimootoreid tootma ka teised tootjad.
Rževski kraanaehitustehas toodab elektrimootorit MKAF225L6, Siberi elektrotehniline ettevõte toodab elektrimootorit 4MTM225L6 PND.Vaatamata prototüübist erinevale välimusele, mis on seotud iga tootja tehnoloogiliste võimalustega, on kõigil neil elektrimootoritel samad elektrilised parameetrid ja paigaldusmõõtmed ning need on täielikult vahetatavad.
Mootorite nimetuste erinevus võimaldab kasutajal teha teadliku valiku ühe või teise tootja vahel, lähtudes enda eelistustest, hinnast, tarneajast jne. Ja samas olge täiesti kindel, et ühe segistitootja elektrimootori asendamine teise tootja elektrimootoriga ei too kaasa segisti riket ega õnnetust.
Viimasel kümnendil on aga siseturule ilmunud erinevate tootjate elektrimootorid, mille kaubamärk kordab täpselt JSC "Sibelectromotor" toodetud "originaalse" elektrimootori kaubamärki. Võib arvata, et elektrimootorite päritolu on seotud meie riigi suure idanaabriga. Nende hind on veidi madalam kui traditsioonilistel tootjatel, seega on huvi ettevõtete tarnete vastu arusaadav.
Seega tellides valmistatud kraanale paigaldamiseks elektrimootori või asendades kraanal kahjustatud elektrimootori töötava vastu, saate endale tundmatu tootja elektrimootori, mille E2nom erineb prototüübi elektrimootorist.
Olukord meenutab mõneti 90ndate algust, kui mitu samanimelist popgruppi korraga mööda riiki tuuritasid.
Tuletagem veel kord meelde, et suhe E2nom / I2nom on keritud rootoriga mootori kõige olulisem parameeter, mis mõjutab käivitustakistite, relee-kontaktori varustuse valikut ja, nagu eespool mainitud, ka mootori iseergastuse tingimust. elektrimootor.
Tihti pole aga kloonitud mootorite nimesiltidel rootoriandmeid üldse. Siin on näide:
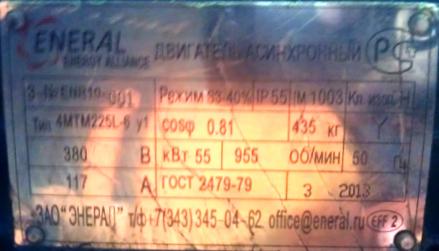
Riis. 3. Rootorkraana asünkroonmootori nimesilt
Muide, sellel elektrimootoril oli «õige» väärtus E2nom, ainult et nüüd tuli see empiiriliselt määrata.
Teiste tootjate kataloogides elektrimootori 4MTM225L6 jaoks on märgitud väärtus E2nom = 340 V, s.o. erutunud mootor muutus erutumatuks. Sellise elektrimootori kasutamise tagajärjeks dünaamilise pidurdamisega iseergastusega elektriajami osana on koormuse langus ja elektrimootori eraldumine koos rootori ja staatori mähiste mehaanilise hävitamisega.
Just seda pilti jälgis autor hiljuti ühes vanimas Venemaa masinaehitusettevõttes, kus tarniti uus kloonitud elektrimootoriga sildkraana tüüp 4MTM225L6, mille E2n = 340 V. Ainult õnne tõttu inimesed seda ei teinud. kannatama. Lisaks taastab kraana omanik kolm (!) korda pärast põiklemist mootorit.
Teine kloonelektrimootorite tootja, kes ilmselt korduvalt sarnaseid õnnetusi kogeb, toodab nüüd sama kaubamärgi all (!) kahte elektrimootorit. Üks E2nom = 340 V, teine E2nom = 264 V on antud kataloogis märkusega: "tüüpi KB kraanidele", st. tornkraanad.
Sellist mootorit kasutatakse tõepoolest kõige laiemalt tornkraanadel, kuid seda paigaldatakse ka sildkraanadele. Nii saate kuulda dialoogi Tarnija ja Kliendi vahel: „Millise kraana jaoks on teil mootorit vaja? Põrandakatte jaoks. Seejärel võtke see (E2nom = 340 V). » Ja elektriliste tõstukite ajamis on iseergastava dünaamilise pidurdamisega juhtpaneel. Tulemust kirjeldatakse eespool.
Samas ei ütle keegi, et need elektrimootorid on defektsed või ebausaldusväärsed ning neid ei saa kraanadel kasutada. Mida rohkem valikuvõimalusi turul, seda parem. Nagu öeldakse, häid ja teistsuguseid mootoreid on rohkem. Lihtsalt nende kaubamärk eksitab tarbijat, mis võib olla tulvil ohtlikke tagajärgi.
Kui soovite kasutada elektrimootorit, mille rootori parameetrid erinevad prototüübist, peate:
-
Mõõtke E2nom, kui rootori ahel on avatud ja staatori mähis on võrku ühendatud;
-
E2nom mõõtmiste põhjal arvutage, valige ja tellige liiteseadme takistid;
-
Valige kataloogist mitteergutavate elektrimootorite juhtpaneel ja tellige see.
Või lihtsalt küsida E2nomi väärtuse kohta enne oma hinnaga meelitava mootori tellimist ja selles konkreetselt lepingus kokku leppida. See aga ei välista E2nom mõõtmist tellitud mootori sisendjuhtimise ajal.
Ülaltoodut kokku võttes võime teha järgmised järeldused:
-
Faasrootori elektrimootoritel põhinevate kodumajapidamiste segistite elektriajamis kasutatakse laialdaselt iseergastavat dünaamilist pidurdamist. Selliseid elektriajameid on töös kümneid tuhandeid. Neid väljastatakse endiselt.
-
Iseergastavas dünaamilises pidurdusrežiimis töötamiseks peab elektrimootoril olema kindel E2nom / I2nom suhe.
-
Keritud rootoriga elektrimootori iseergastuse peamiseks tingimuseks on väärtus E2nom ≤ 300 V.
-
E2nom> 300 V elektrimootorite kasutamine koos ergutatud elektrimootoritele mõeldud juhtpaneelidega võib põhjustada koormuse langemise ja elektrimootori hävitamise.